






多目标点移动机器人改进路径规划算法
送餐机器人,AGV室内机器人仿真路径规划
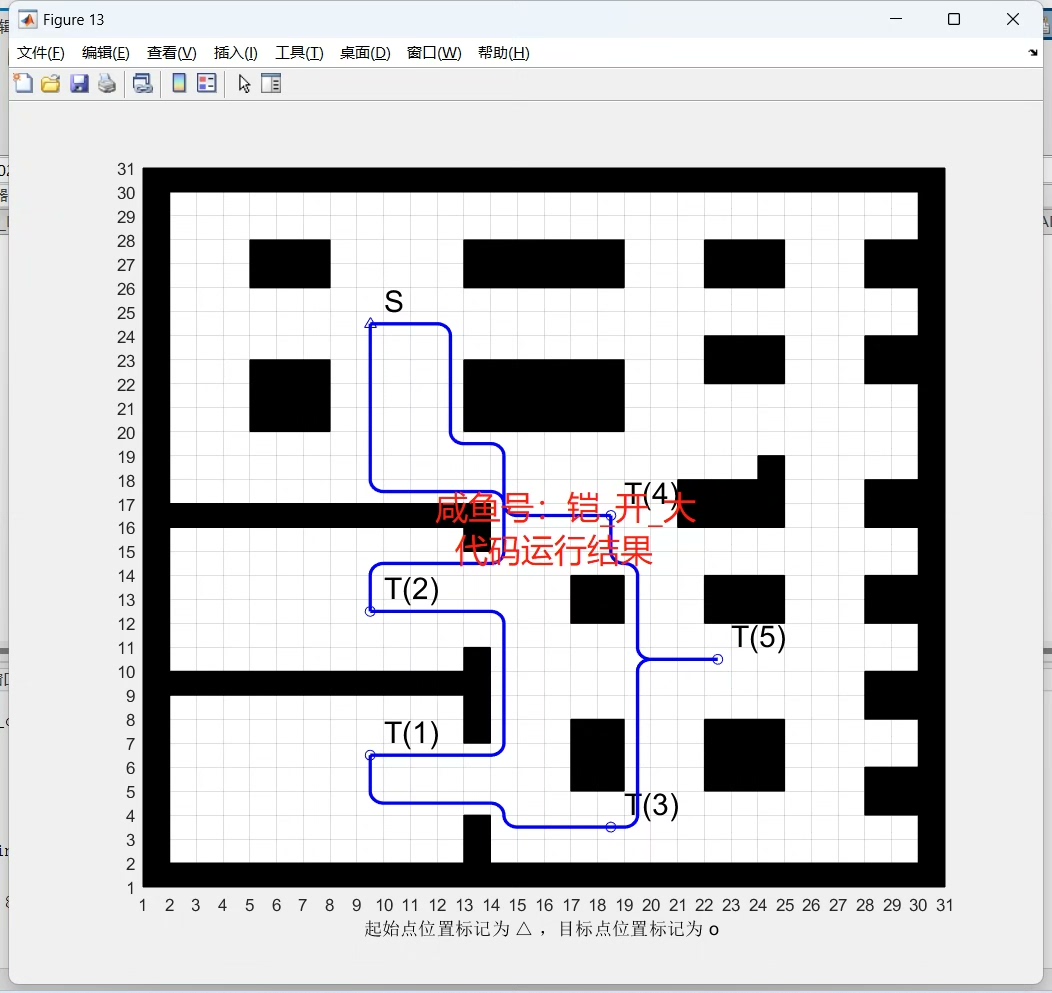
采用改进A*算法融合模拟退火算法,规划多目标点路径规划。
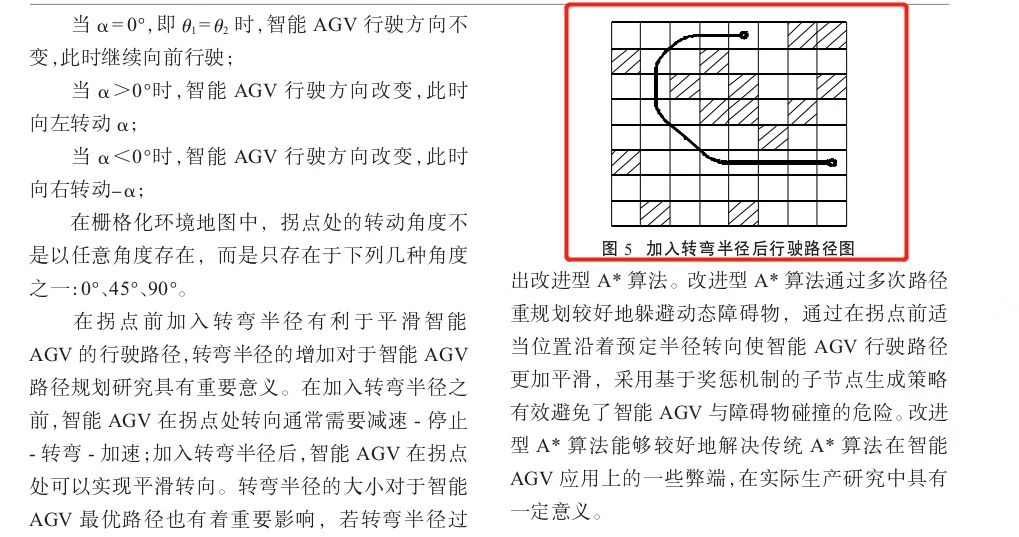
解决路径与障碍物相撞,AGV不斜穿室内区间,采用水平垂直方向移动路径规划,圆弧转弯。
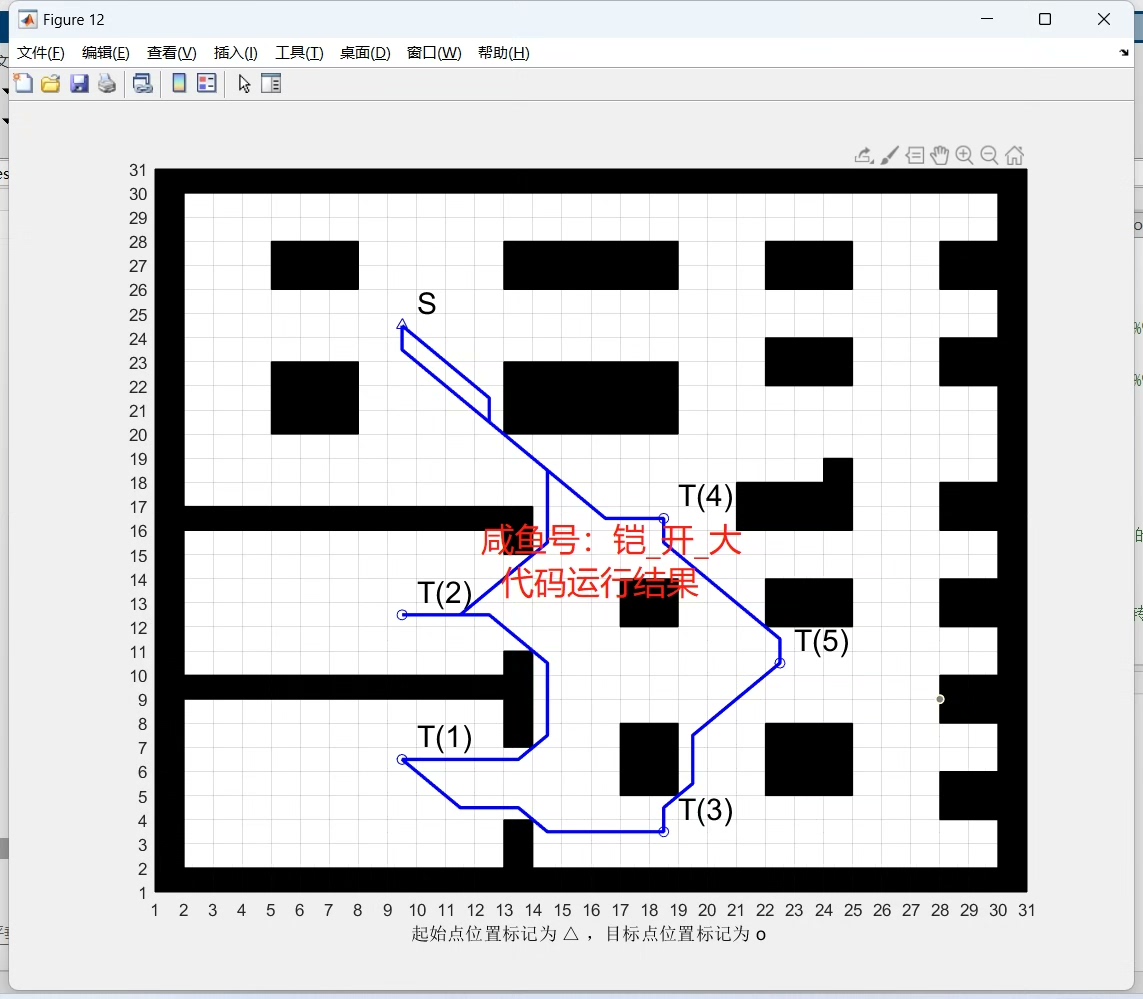
室内旅行商问题——送餐移动机器人(从厨房出发到达多个目标点,最后返回厨房)
1,改进A*算法规划两两之间的路径,并计算路径长度;
2,模拟退火算法依据两点之间路径长度,规划多个目标点的先后到达顺序;
3,组合最优顺序的路径,输出最后路线
ID:63280719151745572
铠_开_大
多目标点移动机器人改进路径规划算法
摘要:本文针对多目标点移动机器人的路径规划问题进行研究,采用改进的A算法融合模拟退火算法,解决了路径与障碍物相撞以及AGV不斜穿室内区间的问题。通过水平垂直方向移动路径规划和圆弧转弯的策略,实现了室内旅行商问题中的送餐移动机器人的路径规划。本文首先改进了A算法,实现了两两目标点之间的路径规划和路径长度计算;然后,利用模拟退火算法根据路径长度规划多个目标点的先后到达顺序;最后,将最优顺序的路径组合起来,输出最终的路线。实验证明,该算法能够有效地解决多目标点移动机器人的路径规划问题。
关键词:多目标点移动机器人,路径规划,改进A*算法,模拟退火算法,送餐机器人,AGV室内机器人
引言
在现代社会,移动机器人在各个领域中得到了广泛的应用,其中包括送餐机器人、AGV室内机器人等。这些机器人需要根据预定的目标点进行移动,并且需要找到最优的路径来实现高效的运输。然而,由于目标点的数量较多,路径规划的问题变得复杂起来。为了解决这个问题,本文提出了一种改进的路径规划算法,通过融合A*算法和模拟退火算法,实现了多目标点移动机器人的路径规划。
- 改进A*算法规划两两之间的路径
在传统的A算法中,通过启发函数估计从起点到终点的最短路径,并通过搜索算法找到最优的路径。然而,在多目标点移动机器人的问题中,需要规划多个目标点之间的路径。因此,本文对A算法进行了改进,实现了两两目标点之间的路径规划和路径长度计算。
首先,将问题抽象为一个图论问题,将每个目标点作为图的一个节点,并通过连接两个目标点的边来表示它们之间的路径。然后,采用改进的A算法来计算两个目标点之间的最短路径。改进的A算法在传统的A*算法的基础上加入了对障碍物的处理,通过判断路径是否与障碍物相撞来避免冲突。
在路径规划过程中,需要考虑到路径长度的计算。为了方便计算,本文使用了欧几里得距离作为评估指标,即路径长度等于两点之间的欧几里得距离。通过改进的A*算法,可以得到两两目标点之间的最短路径和路径长度。
- 模拟退火算法规划多个目标点的先后到达顺序
在多目标点移动机器人的问题中,除了需要规划每两个目标点之间的路径,还需要确定它们的先后到达顺序。为了实现这一目标,本文引入了模拟退火算法。
模拟退火算法是一种基于随机搜索的优化算法,通过模拟退火的过程来逐渐寻找全局最优解。在路径规划问题中,模拟退火算法可以通过调整目标点的先后到达顺序
【相关代码,程序地址】:http://fansik.cn/719151745572.html


















 1221
1221

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









