







1.通信
连接方式:
方式一:wifi连接go1,则必须连接树梅派,连接机器狗热点(出厂WiFi名称为Goxxxxxxxx,密码为00000000)
方式二:网线或无线网卡连接go1,需要设定用户ip地址为192.168.123.XXX
- 网线连接狗(狗开机)
- 将本机地址设置为与机器狗同一网段,如192.168.123.222。
- 测试连接是否成功。终端输入:ping 192.168.123.161/13。
- 查看123网段对应的网卡名字。终端输入:ifconfig。
方式三:屏幕、鼠标键盘连接树莓派,通过进入树莓派直接操作或连接其他板卡
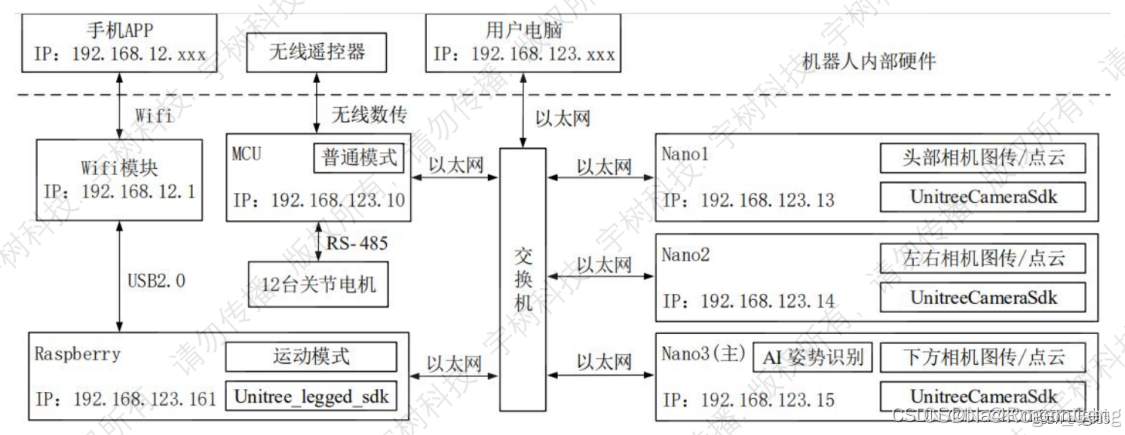
(1)进入Motion Control Board: RasPi 4B (192.168.123.161)
ssh pi@192.168.123.161
123进入此界面后,可以使用以下命令进入其他的板卡。注意不同板卡的切换需要使用exit退回pi的终端。
(2)进入Main control board: MCU (192.168.123.10) Connection refused, 可能不被允许。
ssh unitree@192.168.123.10
123(3)进入头部相机板卡: nano2gb (head, 192.168.123.13)
ssh unitree@192.168.123.13
1232.相机设定
头部板卡消息
需要先通过unitree-desktop或用户pc发送UnitreecameraSDK文件到head板卡:
scp -r UnitreecameraSDK unitree@192.168.123.13:/home/unitree/进入头部相机板卡: nano2gb (head, 192.168.123.13)
ssh unitree@192.168.123.13
123修改trans_rect_config.yaml,将相机发送数据的对象设定为unitree-desktop,192.168.123.15。或者设置为用户自己的ip地址。
#UDP address for image transfer 192.168.123.IpLastSegment
IpLastSegment: !!opencv-matrix
rows: 1
cols: 1
dt: d
data: [ 15. ]编译后运行图片发送端,之后就可以在对应的IP(此处时192.168.123.15)运行接收代码。
cd UnitreecameraSDK/
./bins/example_putImagetrans配置发送
使用图像发送和接受,只需要配置在trans_rect_config.yaml中的参数。stereo_camera_config.yaml中主要用于在当前板卡验证相机的图像获取。<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1055
1055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









