




PX4SITL仿真——uORB实例
飞控串口读取外部传感器数据:飞控开启一个进程读取外部传感器数据,发布一个uORB主题;另一个进程订阅前一个进程发布的主题,订阅到的主题通过mavlink消息发送到地面站(QGroundControl)。
1 新增一个自定义uORB主题
在源码 Firmware/msg 文件夹下是飞控所有的uORB主题
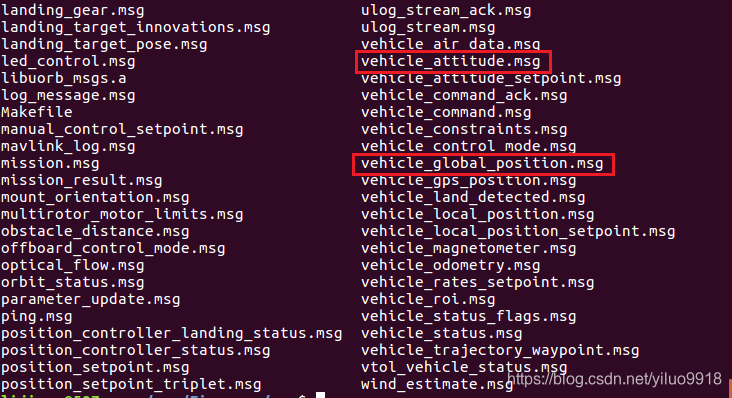
可以看到vehicle_global_position.msg是全球位置,vehicle_attitude.msg是姿态消息。姿态的成员变量包括横滚 roll, 俯仰 pitch,偏航 yaw, 横滚速度,俯仰速度等相关姿态的数据。相关的加速度计,磁力计,陀螺仪经过算法滤波整合之后会发布姿态数
据,而姿态控制进程会订阅这个 vehicle_attitude.msg 主题。
1.1 自定义主题
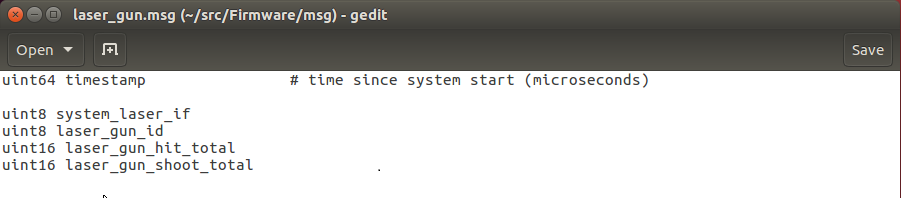
在msg文件夹下添加一个具体的消息:
topic_name.msg,文件里的结构体成员自己定义:
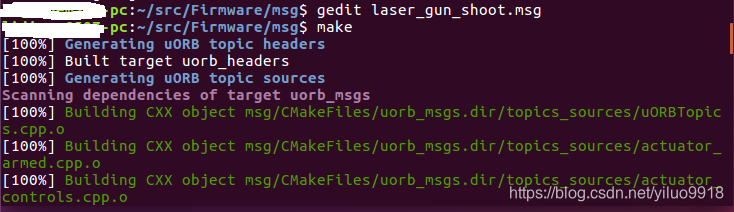
然后修改msg/CMakeList.txt :将自定义的 topic_name.msg 名字写入到该文件中。在编译源码的时候会自动写好头文件。之后make 就可以在Firmware/uORB/topics下看到我们自定义的消息头文件了。

1.2 订阅和发布示例
1、Create a new directory Firmware/src/examples/px4_simple_app.
2、Create a new C file in that directory named px4_simple_app.c:
示例px4_simple_app.c内容如下:
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_config.h>
#include <px4_tasks.h>
#include <px4_posix.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
#include <math.h>
#include <uORB/uORB.h>
#include <uORB/topics/sensor_combined.h>
#include <uORB/topics/vehicle_attitude.h>
__EXPORT int px4_simple_app_main(int argc, char *argv[]);
int px4_simple_app_main(int argc, char *argv[])
{
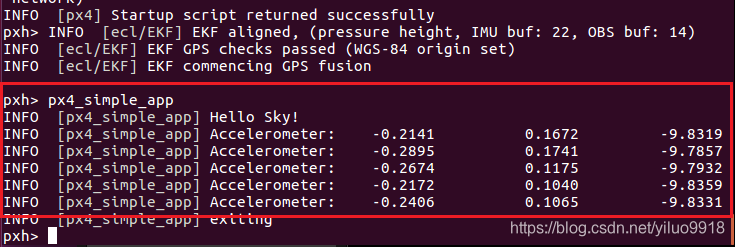
PX4_INFO("Hello Sky!");
/* subscribe to sensor_combined topic */
int sensor_sub_fd = orb_subscribe(ORB_ID(sensor_combined));
/* limit the update rate to 5 Hz */
orb_set_interval(sensor_sub_fd, 200);
/* advertise attitude topic */
struct vehicle_attitude_s att;
memset(&att, 0, sizeof(att));
orb_advert_t att_pub = orb_advertise(ORB_ID(vehicle_attitude), &att);
/* one could wait for multiple topics with this technique, just using one here */
px4_pollfd_struct_t fds[] = {
{ .fd = sensor_sub_fd, .events = POLLIN },
/* there could be more file descriptors here, in the form like:
* { .fd = other_sub_fd, .events = POLLIN },
*/
};
int error_counter = 0;
for (int i = 0; i < 5; i++) {
/* wait for sensor update of 1 file descriptor for 1000 ms (1 second) */
int poll_ret = px4_poll(fds, 1, 1000);
/* handle the poll result */
if (poll_ret == 0) {
/* this means none of our providers is giving us data */
PX4_ERR("Got no data within a second");
} else if (poll_ret < 0) {
/* this is seriously bad - should be an emergency */
if (error_counter < 10 || error_counter % 50 == 0) {
/* use a counter to prevent flooding (and slowing us down) */
PX4_ERR("ERROR return value from poll(): %d", poll_ret);
}
error_counter++;
} else {
if (fds[0].revents & POLLIN) {
/* obtained data for the first file descriptor */
struct sensor_combined_s raw;
/* copy sensors raw data into local buffer */
orb_copy(ORB_ID(sensor_combined), sensor_sub_fd, &raw);
PX4_INFO("Accelerometer:\t%8.4f\t%8.4f\t%8.4f",
(double)raw.accelerometer_m_s2[0],
(double)raw.accelerometer_m_s2[1],
(double)raw.accelerometer_m_s2[2]);
/* set att and publish this information for other apps
the following does not have any meaning, it's just an example
*/
att.q[0] = raw.accelerometer_m_s2[0];
att.q[1] = raw.accelerometer_m_s2[1];
att.q[2] = raw.accelerometer_m_s2[2];
orb_publish(ORB_ID(vehicle_attitude), att_pub, &att);
}
/* there could be more file descriptors here, in the form like:
* if (fds[1..n].revents & POLLIN) {}
*/
}
}
PX4_INFO("exiting");
return 0;
}
3、Create and open a new cmake definition file named CMakeLists.txt. Copy in the text below:
px4_add_module(
MODULE examples__px4_simple_app
MAIN px4_simple_app
STACK_MAIN 2000
SRCS
px4_simple_app.c
DEPENDS
)
1.4 编译订阅发布进程
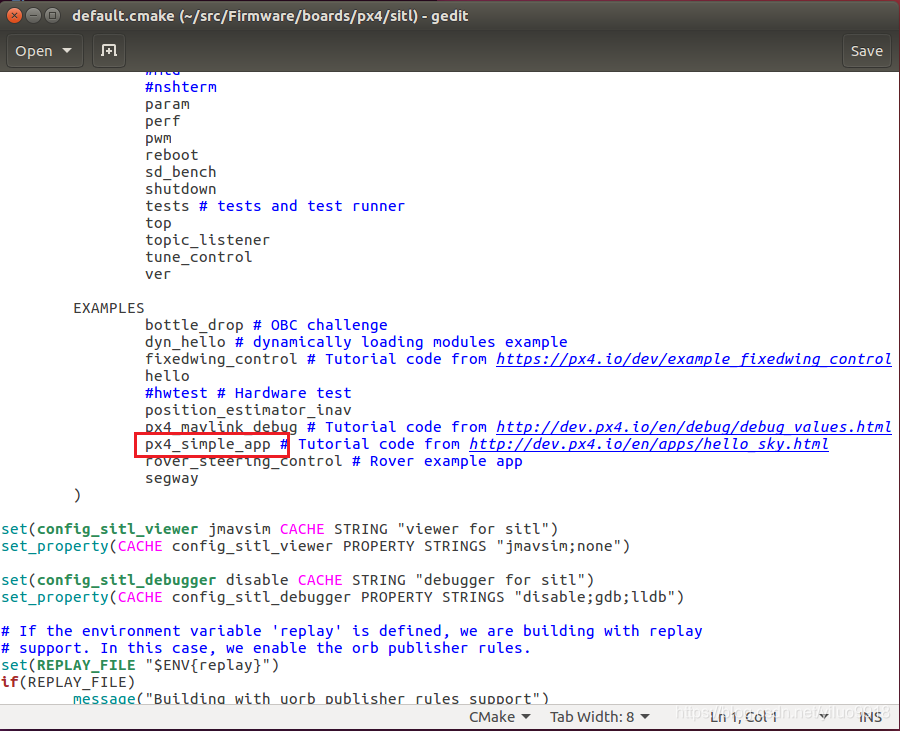
PX4 SITL (Simulator): Firmware/boards/px4/sitl/default.cmake
在default.cmake中添加模块示例,此处的EXAMPLE对应创建的examples/px4_simple_app模块的位置。
编译命令:
make px4 gazebo
1.5 使用进程
uORB进行消息的订阅与发布示例参考:https://dev.px4.io/en/apps/hello_sky.html#subscribing-to-sensor-data

















 1488
1488

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









