






 该博客系统介绍了ICP(iterative closest point)算法及其部分衍生算法,包括point to plan ICP、GICP(generalized ICP)和VGICP(voxelized generalized ICP),这三种衍生算法是对ICP损失函数或数据关联方式的优化。
该博客系统介绍了ICP(iterative closest point)算法及其部分衍生算法,包括point to plan ICP、GICP(generalized ICP)和VGICP(voxelized generalized ICP),这三种衍生算法是对ICP损失函数或数据关联方式的优化。
ICP、Point-to-plane ICP、GICP以及VGICP方法介绍
引言
如有错误或需完善部分请留言,有最新的论文烦请留言告知,会进一步完善,感谢支持。
这篇博客系统的介绍ICP(iterative closest point)算法及其部分衍生算法,包含的衍生算法有point to plan ICP,GICP(generalized ICP)和VGICP(voxelized generalized ICP),这三种衍生算法均是对ICP损失函数或者数据关联方式方面的优化。
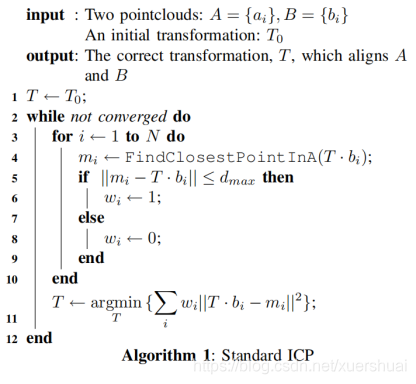
ICP
ICP算法流程图:
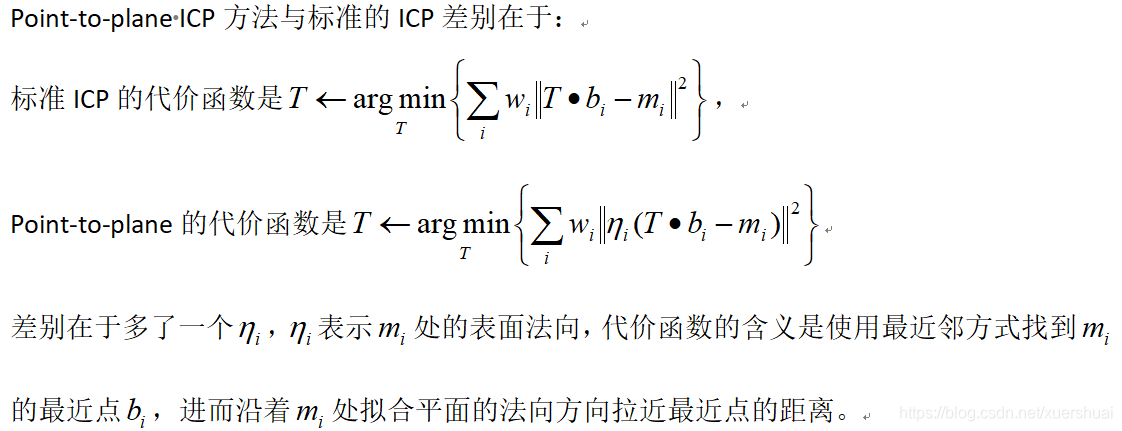
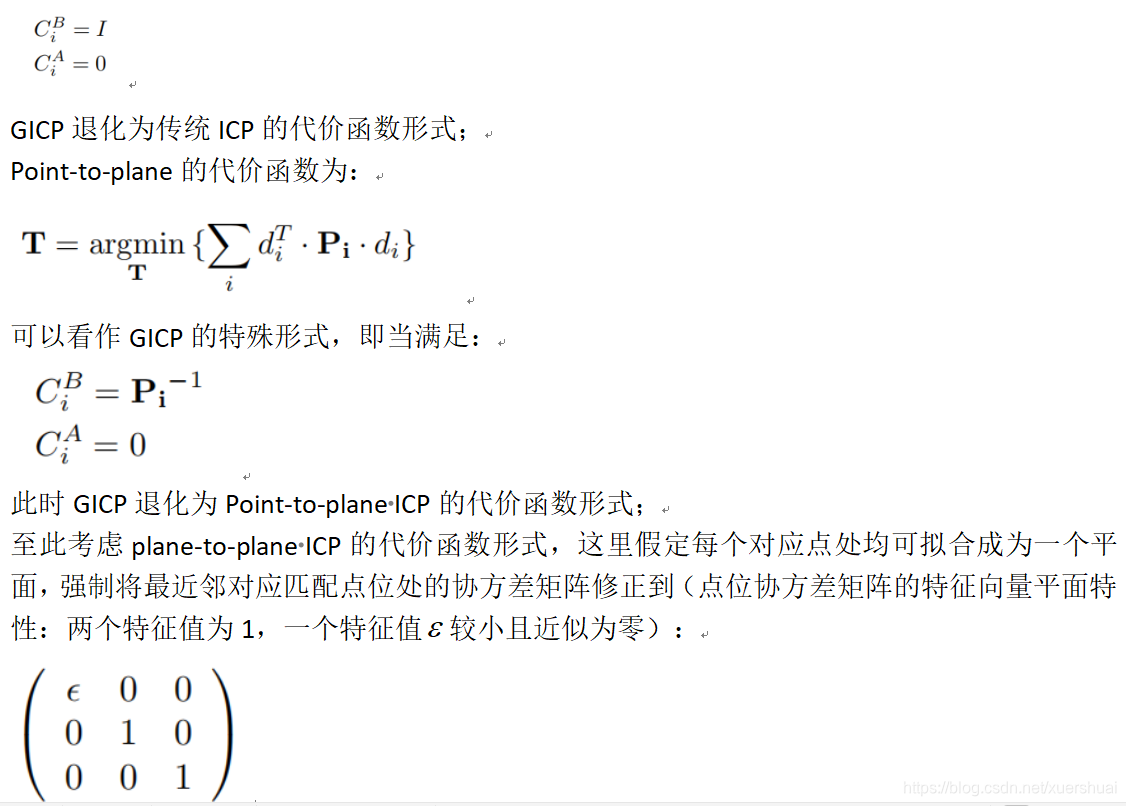
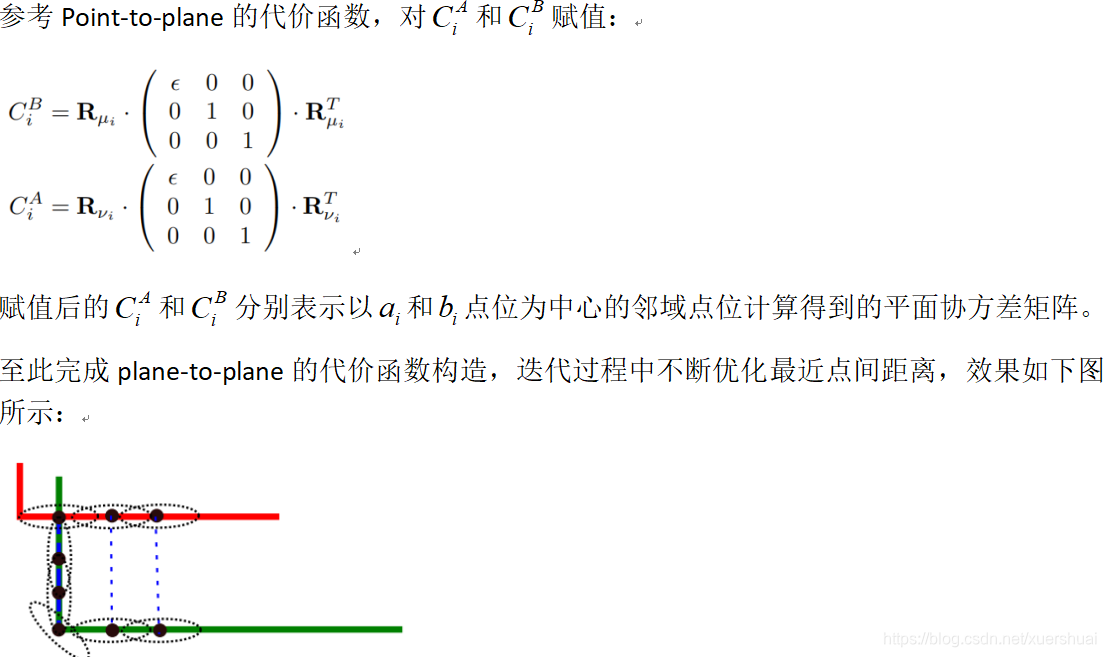
Point-to-plane ICP
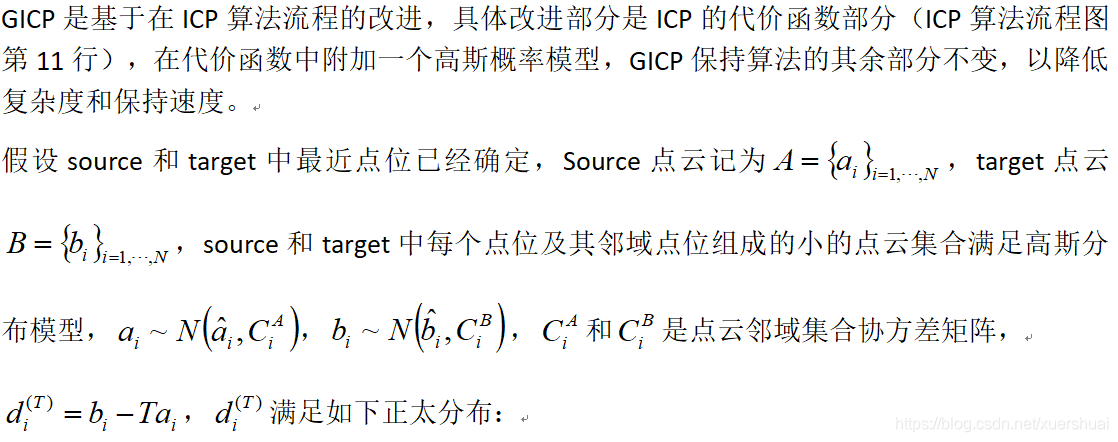
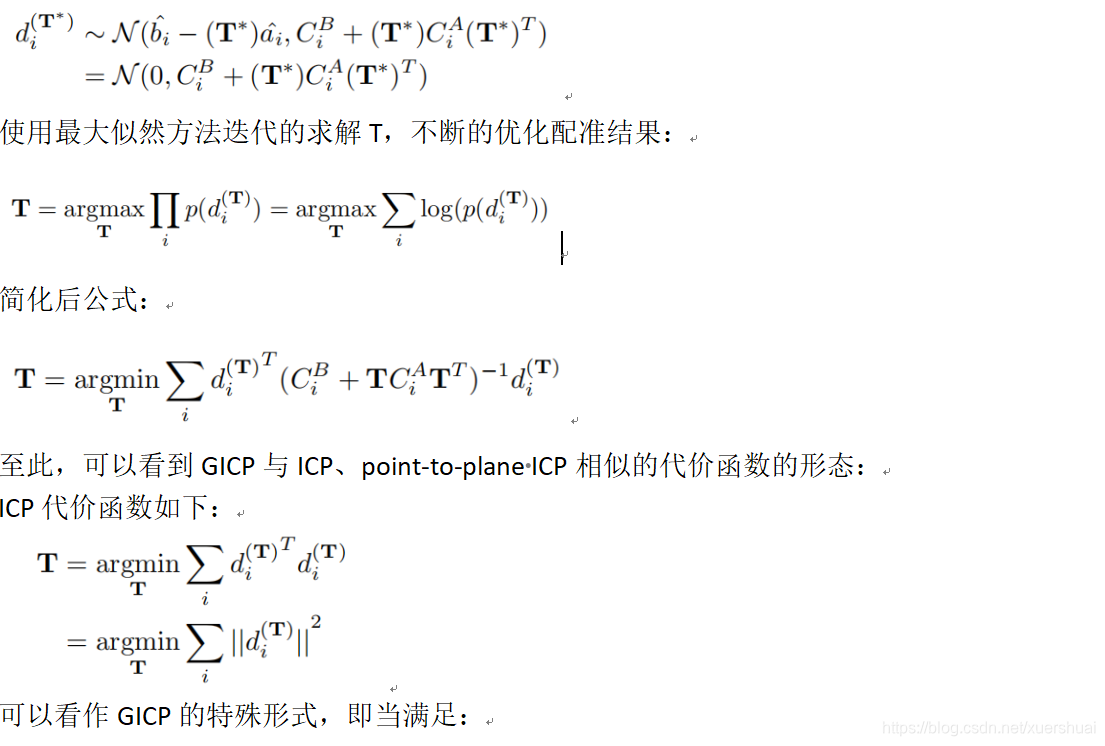
GICP[1]
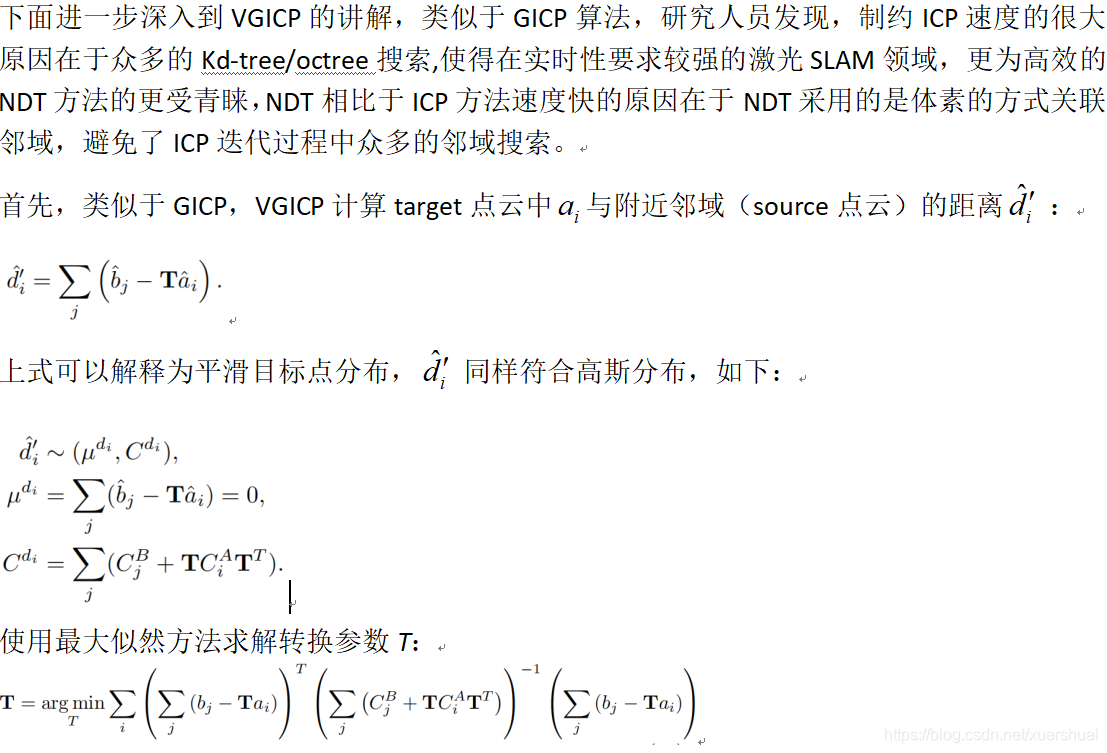
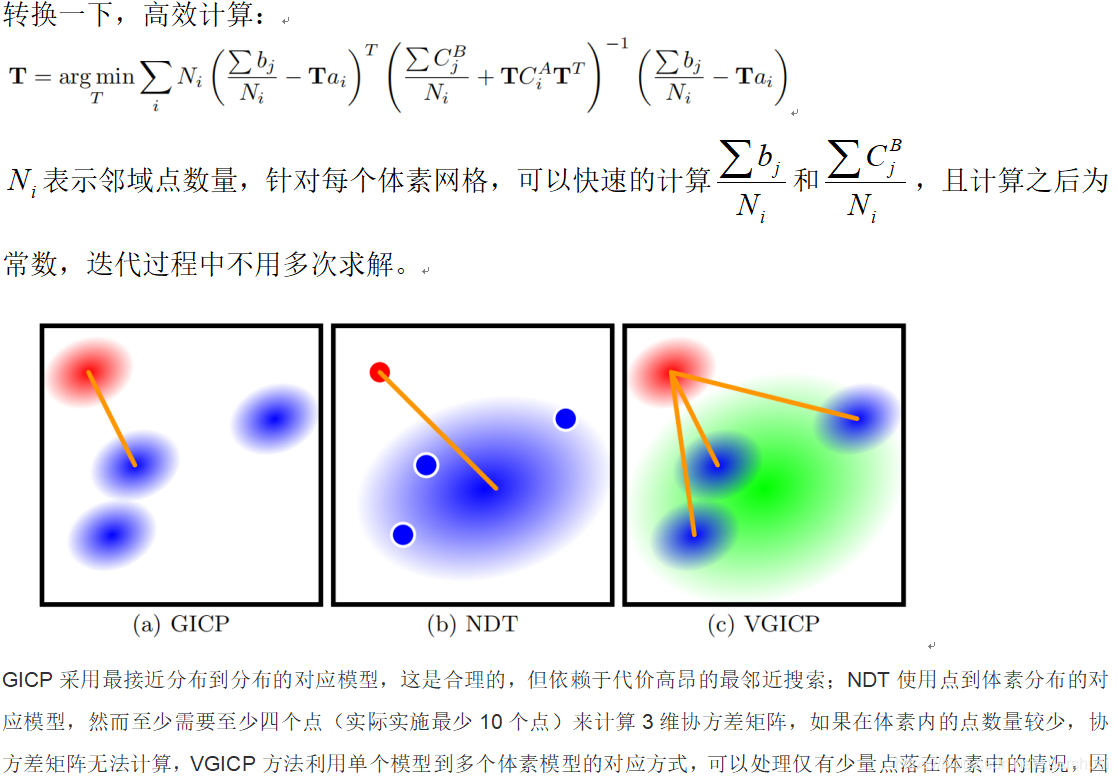
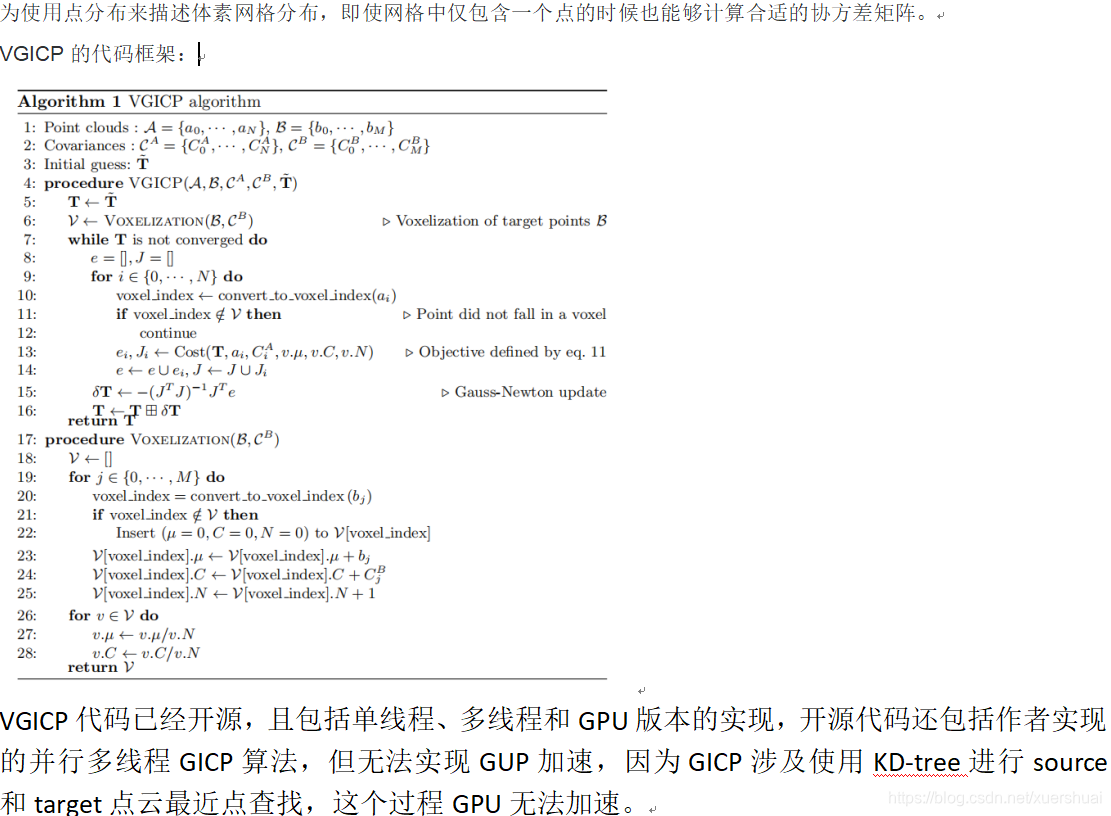
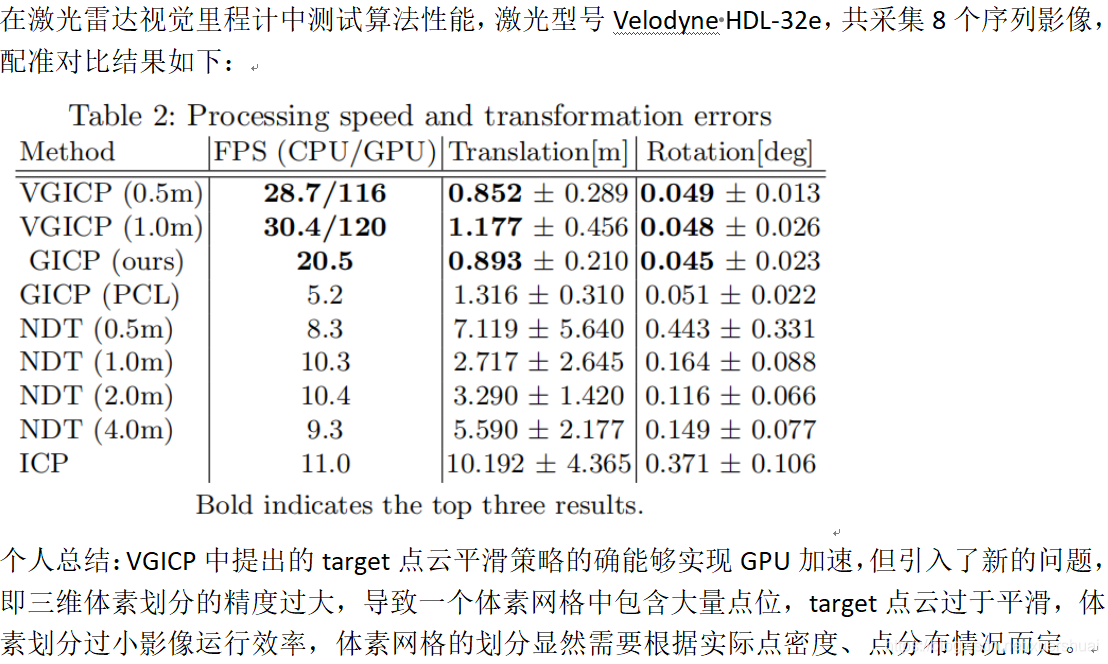
VGICP(Voxelized GICP)[2]
参考文献:
[1]Segal A , Hhnel D , Thrun S . Generalized-ICP[C]// Robotics: Science and Systems V, University of Washington, Seattle, USA, June 28 - July 1, 2009. 2009.
[2]Koide K, Yokozuka M, Oishi S, et al. Voxelized gicp for fast and accurate 3d point cloud registration[J]. EasyChair Preprint, 2020 (2703).

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









