







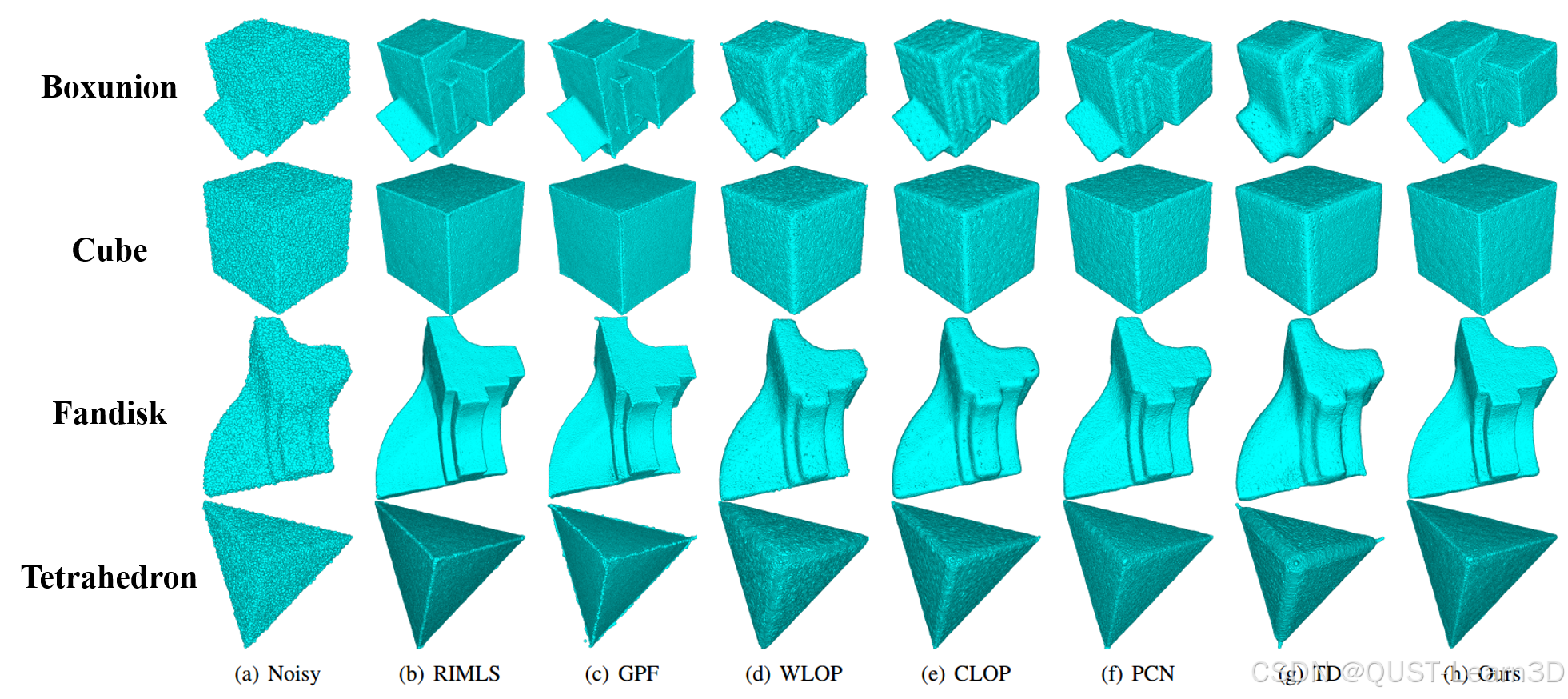
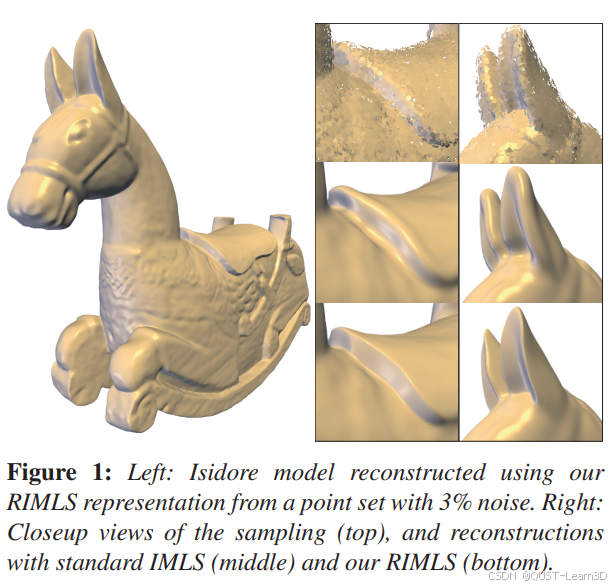
RIMLS(Robust Implicit Moving Least Squares)是一种用于点云去噪和表面重建的算法。它特别适用于处理具有锐利边缘的点云数据,因为它能够在去噪的同时保留这些边缘特征。RIMLS算法的核心思想是将点云中的每个点投影到一个分段光滑的表面上,这个表面是通过局部拟合点云数据得到的。RIMLS算法能够有效地处理具有锐利边缘的点云数据,同时减少噪声的影响。这使得它在许多应用中非常有用,如三维建模、计算机视觉和几何处理 。
资源中给出了一种C++实现,
基于Github代码,增加CGAL数据类型的适配。
Plane-Detection-Point-Cloud
RIMLS有几个关键参数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









