




是什么: openvslam是日本先进工业科技研究(National Institute of Advanced Industrial Science and Technology )所于2019年5月20日开源的视觉SLAM框架; github源码地址:https://github.com/xdspacelab/openvslam
干什么的: 先上图:
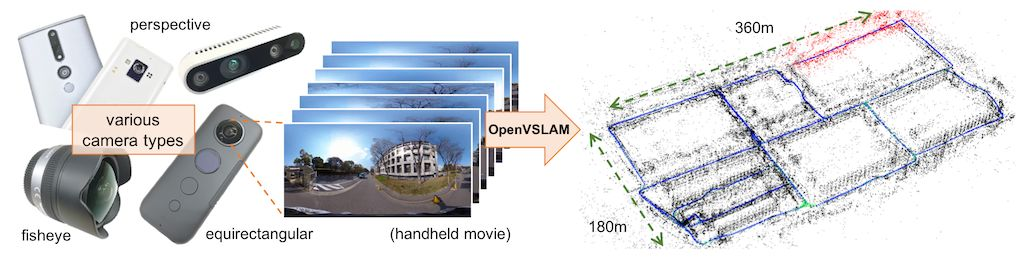
通过不同类型的相机(单目,双目,RGBD,鱼眼或者全景相机)拍摄的序列图像(视频),实时定位当前位置以及重建三维空间的开源SLAM框架
优势(1)增加了鱼眼和全景相机的接口;
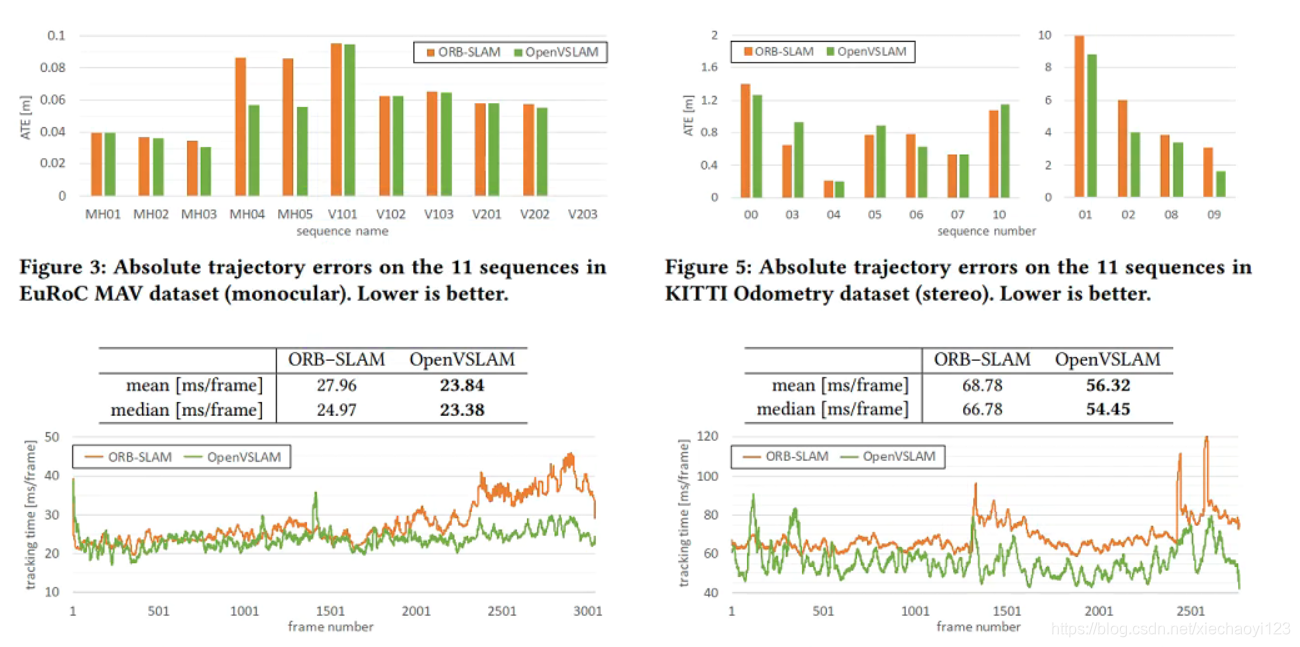
(2)相比较业内开源代码ORBSLAM2速度和性能上更具优势,原文截图:
(3)详细的文档,地址:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1405
1405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









