



上一篇文章讲到了反射矩阵和旋转矩阵,由于考试将近,这里先跳过了课件中的快速傅里叶变换域卷积(考试不考,而且我想花时间把这点单独写一篇文章)
上三角化求解最小二乘
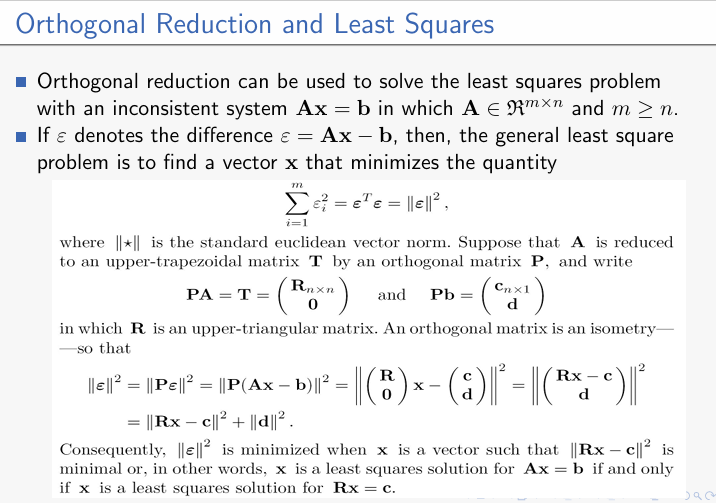
对于不相容线性方程组 Ax=b(即该方程组无解),最小二乘问题的目标是找到 x,使得残差 ε=Ax−b 的欧氏范数平方最小。
通过正交矩阵 (前面提到过,正交矩阵是 “保范数” 的等距变换,即
)对
做正交约简,将
化为上梯形矩阵
:

也就是之前QR分解的过程。
同时,对常数项做同样的正交变换:
利用正交矩阵的保范性,残差的范数平方可转化为:

由于是与
无关的常数,要最小化
,只需最小化
。
而是上三角矩阵,
最小当且仅当
。
因此,原方程组 Ax=b 的最小二乘解,等价于上三角方程组 Rx=c 的解
四种上三角化方式的数值稳定性对比
1. Householder/Givens 约简(QR 分解):稳定
- 原理:正交矩阵
是保范的,浮点误差
(
(
的误差)不会放大。
- 推导:近似分解
,由于
、
,误差项的量级与
相当,因此
,算法稳定。
2. 高斯消元(LU 分解):不稳定(除非完全选主元)
- 无选主元 / 部分选主元:浮点误差下,近似分解
。若
或
的元素远大于
、
会被放大,导致结果偏离原矩阵。
- 完全选主元:可控制
,这里的证明比较繁琐,不再说明),此时算法稳定,但完全选主元计算成本高。
3. Gram-Schmidt(QR 分解):分情况
- 作为 QR 分解算法:经典 / 改进 Gram-Schmidt 均不稳定(误差会积累)。
- 作为最小二乘求解算法:改进 Gram-Schmidt 是稳定的(误差传播被约束)。
总结

我们可以看到,尽管有非常的求解线性方程组的方式,我们最开始接触到的高斯消元仍然是最快的算法。
互补子空间
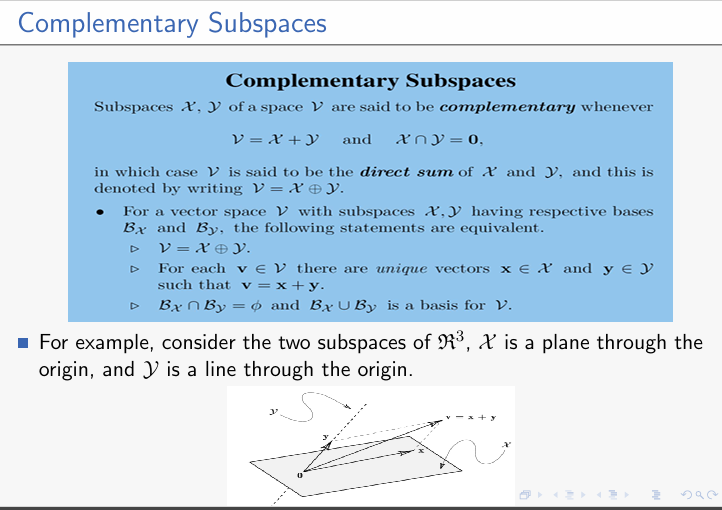
设是向量空间
的子空间,若满足:
(空间的和,即
中任意向量可表示为
与
中向量的和);
(交为零向量,即分解唯一)。
则称与
是互补子空间,此时
称为
与
的直和,记为
若的基为
,
的基为
,则以下陈述等价:
;
,
);
(基向量无交集),且
是
以为例:
- 取
- 取
此时,且
,因此
与
是互补子空间,
投影
在模与内积(五)中讲正交投影矩阵时,有提到过投影的理解
现在再从互补子空间的角度理解投影:
已知向量空间(
是补子空间),则对任意
,存在唯一分解
(
):
称为
沿着
称为
投影的分类:
- 正交投影(Orthogonal Projection):若
(即
- 斜投影(Oblique Projection):若
从我们之前学到的投影矩阵来看,对于中的补子空间
,可构造投影矩阵
,使得对任意
,
恰好是
沿着
投影到
的结果。下面我们对投影矩阵下一个定义
投影矩阵(投影算子)
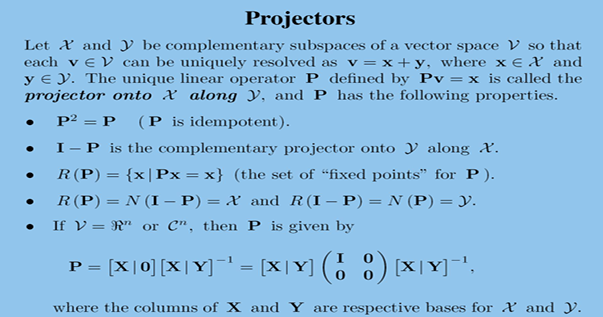
设,
是向量空间V的补子空间
,对任意
(
),定义线性算子
满足
,则称
为沿着
投影到
的投影算子。
投影矩阵的性质
下面解释一下为什么的值域空间(像空间)和零空间(核空间)是这样的:
首先明确,对任意,存在唯一分解:
回忆一下值域空间的定义:满足
,在线性算子
中,值域空间是所有
的结果构成的集合。由于
,而
可以取遍
中的任意向量,因此
。
零空间的定义是满足的所有
构成的集合。若
,则分解式中
,即
;反之,对任意
,取
,则
。因此
。
总上,,
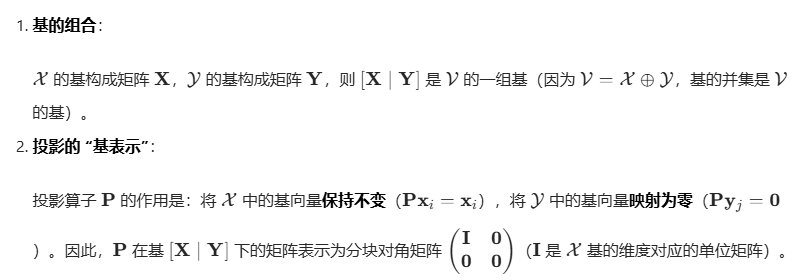
投影的值域空间和零空间的关系作用

设的基构成矩阵
,
的基构成矩阵
,则投影矩阵
可表示为:

证明如下:
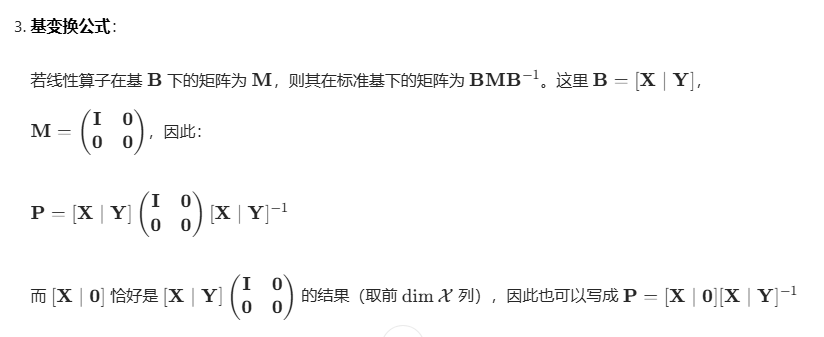
如果看不懂最后的基变换,可以查看线性变换(三)——基变换矩阵
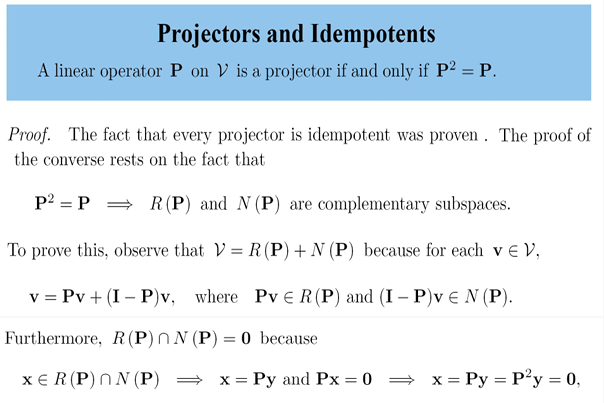
线性算子 是投影算子,当且仅当它是幂等的
是投影算子,当且仅当它是幂等的
证明如下:
-
必要性(投影算子→幂等):投影算子的定义是 “将向量分解为补子空间的和,保留目标子空间部分”,因此
,故
-
充分性(幂等→投影算子):若
- 空间的和:对任意
,可分解为
,其中
(值域空间),
(零空间),故
;
- 交为零向量:若
,则
且
,因此
,故
。
- 空间的和:对任意
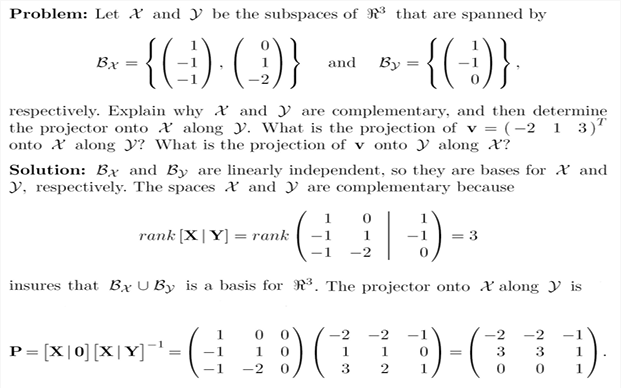
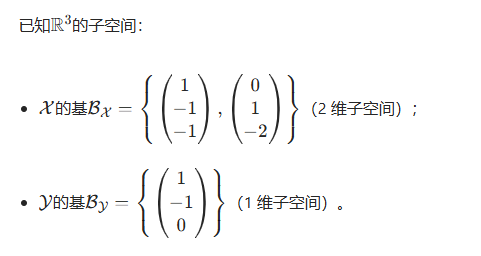
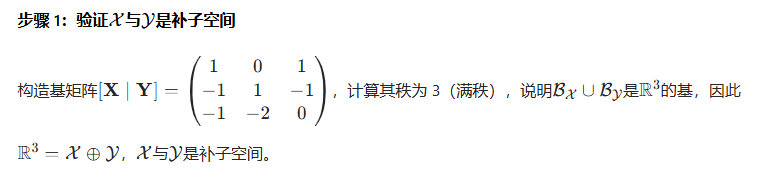
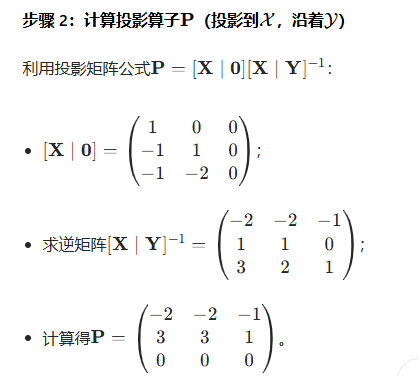
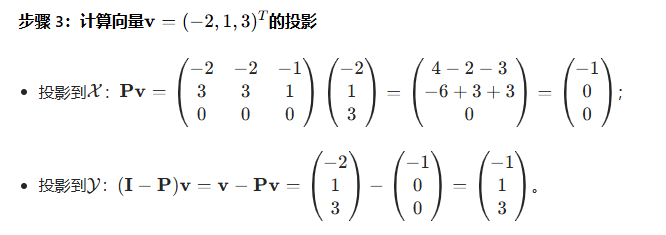
最后放一个互补子空间投影算子的计算过程:

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









