



FAR Planner 是一种面向动态复杂环境的路径规划算法,主要用于机器人、自动驾驶等领域,能够在部分未知或实时变化的环境中高效生成安全路径。以下是对其核心特点及应用场景的介绍:
核心特点
- 动态环境适应
- 实时处理动态障碍物(如行人、车辆)和环境变化(如突然出现的障碍),通过传感器数据(如激光雷达、摄像头)持续更新地图。
- 支持在线重规划,避免因环境变化导致路径失效。
- 分层规划架构
- 结合全局规划与局部调整:首先生成粗略的全局路径,再根据实时信息进行局部优化,平衡效率与灵活性。
- 适合大规模复杂场景(如多层建筑、狭窄通道)。
- 处理未知区域
- 在探索未知环境时,通过增量式地图构建逐步扩展可行路径,减少对先验地图的依赖。
- 高效性与鲁棒性
- 算法优化计算效率,适合资源受限的嵌入式系统。
- 避免陷入局部最优,确保在复杂地形中找到可行解。
应用场景
- 救援机器人:在灾害现场等非结构化环境中自主导航。
- 仓储物流:动态仓库中AGV的实时路径规划。
- 自动驾驶:城市道路中应对突发障碍物或交通变化。
- 服务机器人:医院、酒店等场景的人机共存环境导航。
开源与实现
- 代码支持:部分版本可能基于ROS(机器人操作系统)实现,常用C++或Python。
- 实践案例:在DARPA地下挑战赛等国际赛事中,类似算法被用于地下洞穴探索机器人。
仿真测试效果展示
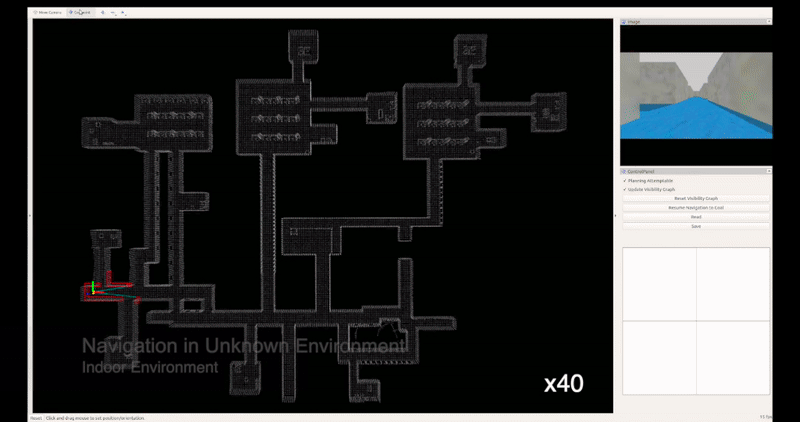
本地仿真测试(Ubuntu 18.04 )
- 仿真环境部署 Autonomous Exploration Development Environment
- FAR Planner仿真测试 https://github.com/MichaelFYang/far_planner?tab=readme-ov-file
- 本地环境仿真测试效果:
暂时文档外展示此内容
The repository has been tested in Ubuntu 18.04 with ROS Melodic and Ubuntu 20.04 with ROS Noetic. Follow instructions in Autonomous Exploration Development Environment to setup the development environment. Make sure to checkout the branch that matches the computer setup, compile, and download the simulation environments.
To setup FAR Planner, clone the repository.
git clone https://github.com/MichaelFYang/far_planner
In a terminal, go to the folder, checkout the ‘melodic-noetic’ branch, and compile.
cd far_planner
git checkout melodic-noetic
catkin_make
To run the code, go to the development environment folder in a terminal, source the ROS workspace, and launch.
source devel/setup.sh
roslaunch vehicle_simulator system_indoor.launch
Reference
- F. Yang, C. Cao, H. Zhu, J. Oh, and J. Zhang. FAR Planner: Fast, Attemptable Route Planner using Dynamic Visibility Update. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS). Kyoto, Japan, Oct. 2022. Best Student Paper Award.
- 开源仿真环境项目地址:Autonomous Exploration Development Environment
- 开源代码项目地址:https://github.com/MichaelFYang/far_planner?tab=readme-ov-file


















 972
972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









