



本设计包含原理图+PCB
设计编号:C0013
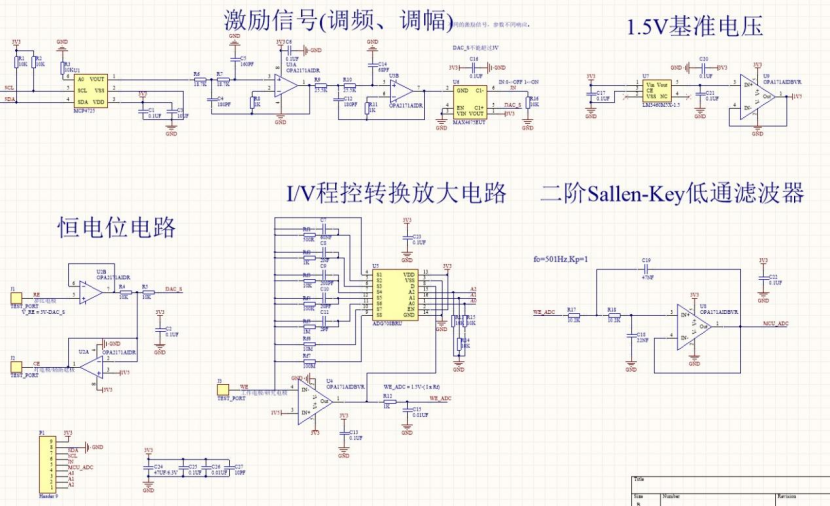
📚电路概述
1.激励信号产生单元:采用MCP4725 DAC芯片产生激励电压信号,通过OPA2171轨道轨高性能放大器构成的滤波电路进行平滑滤波,MAX4675EUT为数字开关,对滤波后的信号进行开关控制,用于改变激励信号的的频率;理解为MCP4725改变激励信号的电压,数字开关实现频率调节,这样就是现实了激励信号的调频和调幅。
2.基准参考电压单元:采用LM3460M5X高精度低漂移基准电压芯片构成,再通过OPA171设计跟随器实现稳定的基准电压输出。
3.恒电位仪电路单元:这里采用基于电流跟随器的恒电位电路,采用OPA2171构成。OPA2171内部具有2个放大器。详细参考原理图。
4.I/V程控转换放大电路:采用OPA171构成I/V转换电路,ADG708为8通道多通道模拟开关,通过控制ADG708可切换不同的反馈参数,接入到放大器的反馈电路中,实现放大倍数的改变。(放大倍数计算,查看原理图)
5.低通滤波器:采用二阶Sallen-Key低通滤波器结构,设计参数为fo=501Hz,Kp=1,详细参考原理图。
📚原理图
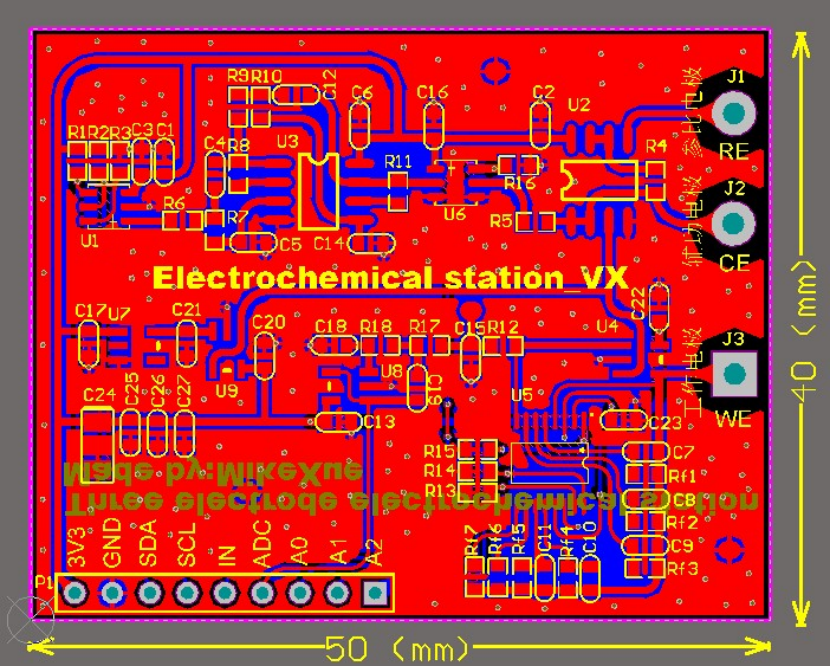
📚PCB
📚资料清单


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









