







专栏介绍
- 攻克小目标检测难题,显著提升检测性能。
- 聚焦小目标及遮挡物检测,推动性能优化与技术创新。
- 探索工业场景下小目标检测性能提升路径与部署可行性。
- 持续更新,定期分享不同数据集上的性能提升情况 。
一、本文改进:基于Wasserstein Distance Loss的小目标检测评估方法
采用Wasserstein Distance Loss,经实测,在小目标检测任务中效果显著。
同时,推出独家原创的YOLO小目标检测创新方案,适用于YOLOv5、YOLOv8等系列YOLO模型。专栏内提供详细步骤与完整源码,助您轻松实现小目标检测的性能提升。
重点是,通过阅读本专栏,您可结合自身小目标检测数据集,在网络的Backbone、head、detect、loss等不同组件处灵活调整,实现小目标检测效果的提升与创新突破。
二、Wasserstein Distance Loss介绍
论文题目:
《A Normalized Gaussian Wasserstein Distance for Tiny Object Detection》
论文地址:
https://arxiv.org/abs/2110.13389
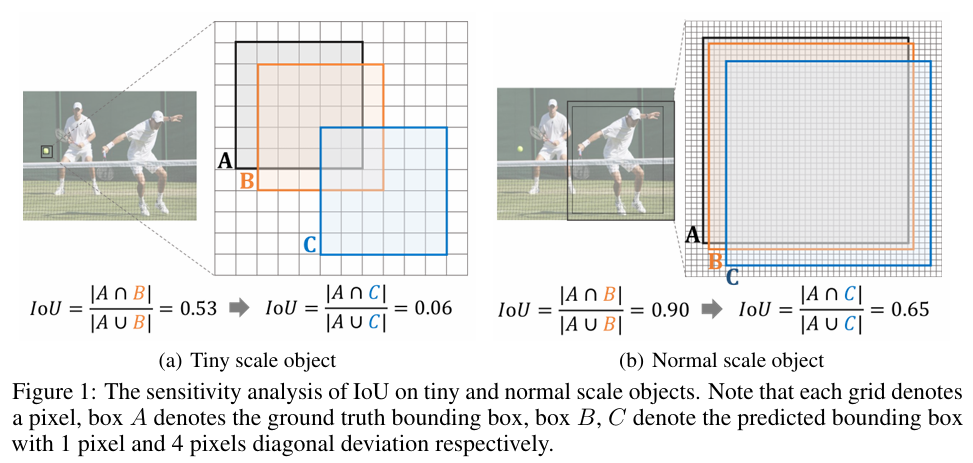
检测微小的物体是一个非常具有挑战性的问题,因为微小的物体只包含几个像素大小。我们证明,由于缺乏外观信息,最先进的探测器在微小物体上无法产生令人满意的结果。我们的主要观察结果是,基于 IoU 交集 (IoU) 的指标(例如 IoU 本身及其扩展)对微小物体的位置偏差非常敏感,并且在基于锚点的探测器中使用时会大大降低检测性能。为了缓解这种情况,我们提出了一种新的评估指标,使用 Wasserstein 距离进行微小物体检测。具体来说,我们首先将边界框建模为 2D 高斯分布,然后提出一个名为归一化 Wasserstein 距离 (NWD) 的新度量,通过相应的高斯分布来计算它们之间的相似性。所提出的 NWD 度量可以很容易地嵌入到任何基于锚点的检测器的赋值、非极大值抑制和损失函数中,以取代常用的 IoU 度量。我们在新的微小目标检测数据集 (AI-TOD) 上评估我们的指标,其中平均目标大小远小于现有的目标检测数据集。广泛的实验表明,当配备 NWD 指标时,我们的方法产生的性能比标准微调基线高 6.7 AP 分,比最先进的竞争对手高 6.0 AP 分。
该文档提出了一种用于小目标检测的归一化高斯Wasserstein距离(NWD),通过将边界框建模为二维高斯分布,利用Wasserstein距离计算相似性,解决了IoU对小目标位置偏差敏感的问题,显著提升了小目标检测性能。
背景与挑战
- 小目标检测难点:小目标(如AI-TOD数据集中<16×16像素)因像素少、特征不明显,现有方法(如FPN、GAN)难以有效检测。
- IoU的局限性:IoU及其扩展指标对小目标位置偏差敏感,导致标签分配不准确、训练样本不足,影响检测性能。
方法创新
- 高斯分布建模
- 将边界框表示为二维高斯分布,均值为框中心,协方差矩阵由宽高决定。
- 公式:N(μ,Σ)N(\mu, \Sigma)N(μ,Σ),其中μ=[cx,cy]T\mu = [c_x, c_y]^Tμ=[cx,cy]T,Σ=diag(w2/4,h2/4)\Sigma = \text{diag}(w^2/4, h^2/4)Σ=diag(w2/4,h2/4)。
- 归一化Wasserstein距离(NWD)
- 计算两个高斯分布的二阶Wasserstein距离:
W22(Na,Nb)=∥ma−mb∥22+∥Σa1/2−Σb1/2∥F2W_2^2(\mathcal{N}_a, \mathcal{N}_b) = \|m_a - m_b\|_2^2 + \|\Sigma_a^{1/2} - \Sigma_b^{1/2}\|_F^2W22(Na,Nb)=∥ma−mb∥22+∥Σa1/2−Σb1/2∥F2 - 归一化处理:
NWD=exp(−W22C)\text{NWD} = \exp\left(-\frac{\sqrt{W_2^2}}{C}\right)NWD=exp(−CW22)
其中C为数据集相关常数。
- 计算两个高斯分布的二阶Wasserstein距离:
- NWD的优势
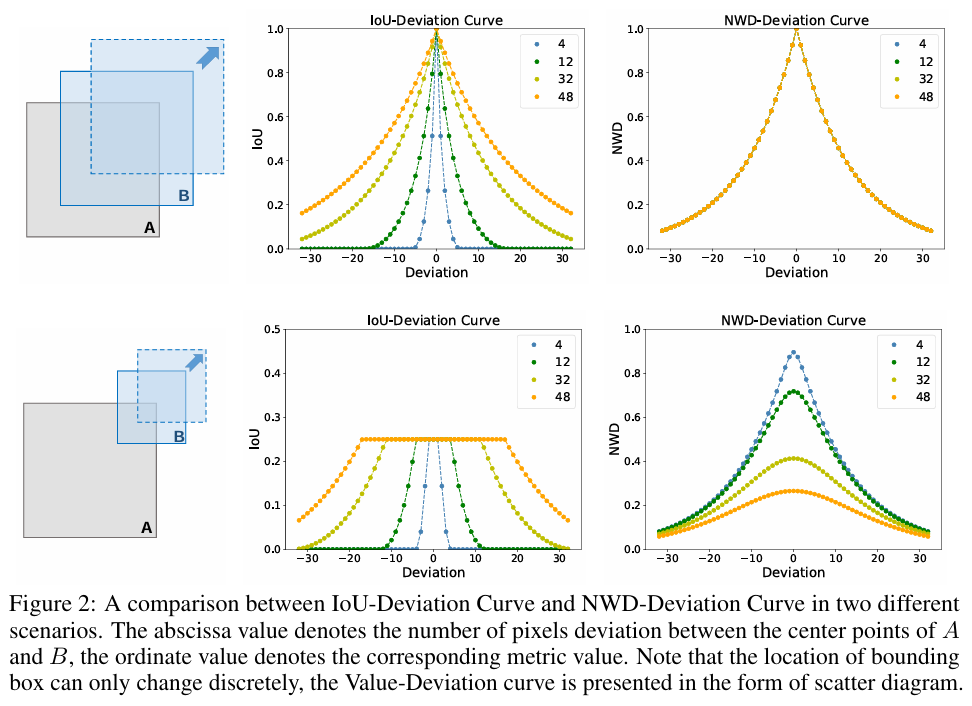
- 尺度不变性:对不同尺度目标的位置偏差不敏感。
- 非重叠鲁棒性:可衡量无重叠或包含关系的边界框相似性。
- 平滑性:位置偏差引起的NWD变化更平缓,利于样本区分。
应用模块
- 标签分配
- 用NWD替代IoU,确保每个GT框匹配足够正样本,提升训练监督质量。
- 非极大值抑制(NMS)
- 基于NWD的NMS更有效抑制冗余框,减少小目标漏检。
- 回归损失函数
- NWD损失(LNWD=1−NWD\mathcal{L}_{\text{NWD}} = 1 - \text{NWD}LNWD=1−NWD)在无重叠或包含情况下仍提供梯度。
实验结果
- AI-TOD数据集
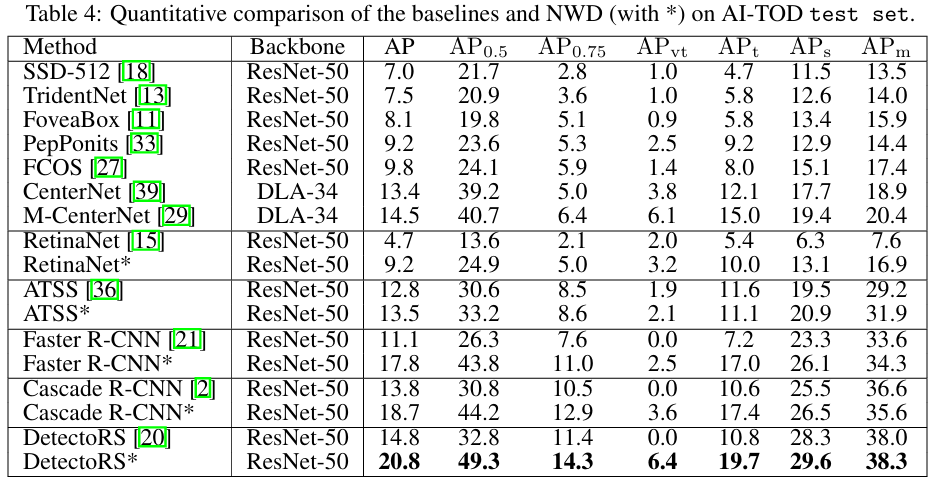
- AP提升:Faster R-CNN+NWD的AP从11.1%提升至17.8%,AP_t(8-16像素)从7.2%提升至17.0%。
- SOTA性能:NWD-based DetectoRS达到20.8% AP,显著优于现有方法。
- VisDrone2019数据集
- 泛化能力:Faster R-CNN+NWD的AP_vt(2-8像素)从0.1%提升至3.8%,AP_t从6.2%提升至10.2%。
- 消融实验
- 模块有效性:NWD在标签分配、NMS和损失函数中均带来性能增益,其中标签分配贡献最大。
结论
- 贡献:提出NWD解决小目标检测中IoU的敏感性问题,通过高斯建模和Wasserstein距离提升检测性能。
- 应用价值:NWD可无缝集成到现有锚点检测器中,适用于多阶段和单阶段方法,显著提升小目标检测精度。
三、加入实验部分
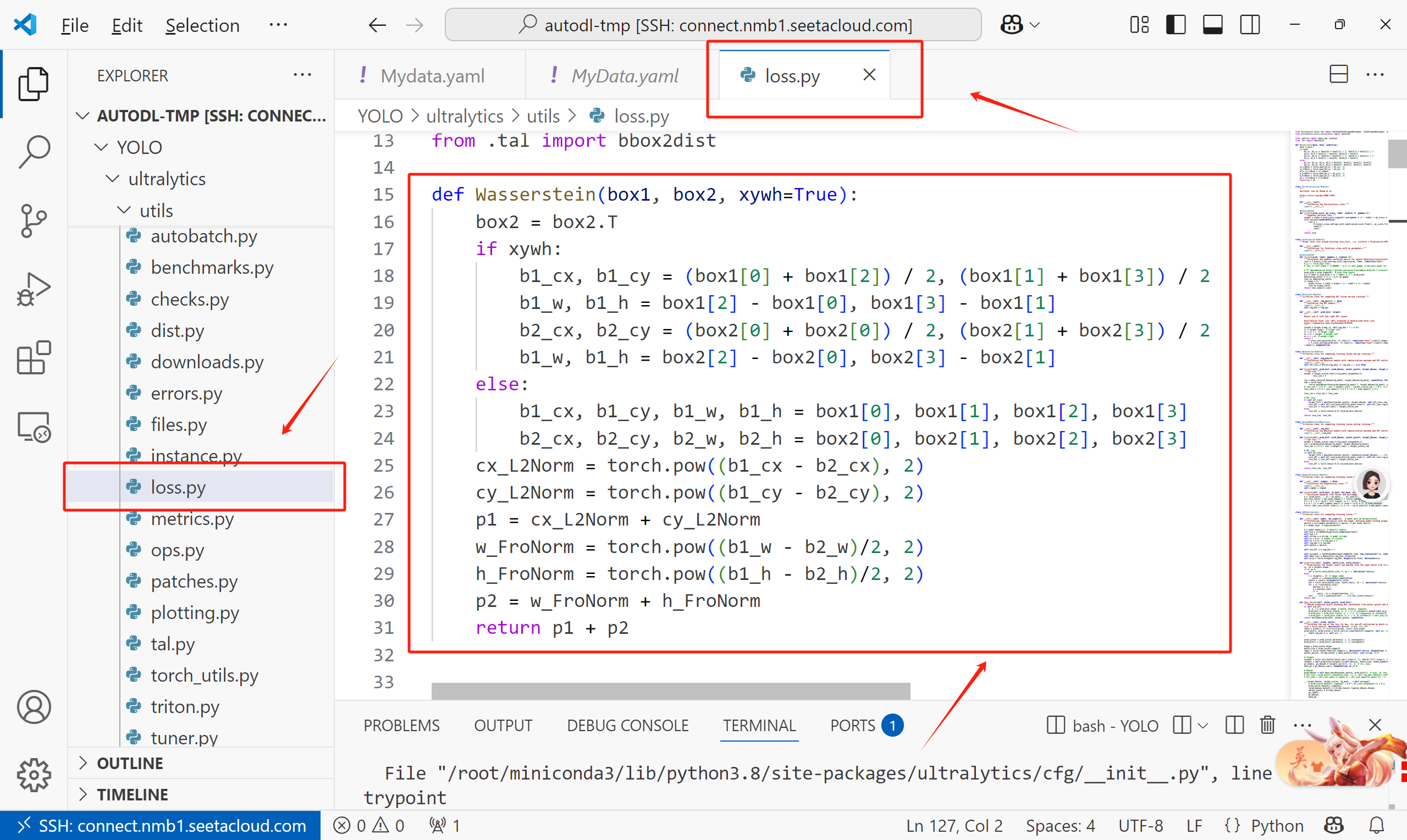
3.1 在 ultralytics/yolo/utils/loss.py 文件中加入 Wasserstein
def Wasserstein(box1, box2, xywh=True):
box2 = box2.T
if xywh:
b1_cx, b1_cy = (box1[0] + box1[2]) / 2, (box1[1] + box1[3]) / 2
b1_w, b1_h = box1[2] - box1[0], box1[3] - box1[1]
b2_cx, b2_cy = (box2[0] + box2[0]) / 2, (box2[1] + box2[3]) / 2
b1_w, b1_h = box2[2] - box2[0], box2[3] - box2[1]
else:
b1_cx, b1_cy, b1_w, b1_h = box1[0], box1[1], box1[2], box1[3]
b2_cx, b2_cy, b2_w, b2_h = box2[0], box2[1], box2[2], box2[3]
cx_L2Norm = torch.pow((b1_cx - b2_cx), 2)
cy_L2Norm = torch.pow((b1_cy - b2_cy), 2)
p1 = cx_L2Norm + cy_L2Norm
w_FroNorm = torch.pow((b1_w - b2_w)/2, 2)
h_FroNorm = torch.pow((b1_h - b2_h)/2, 2)
p2 = w_FroNorm + h_FroNorm
return p1 + p2
class BboxLoss(nn.Module):
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum
需要替换,替换代码如下所示:
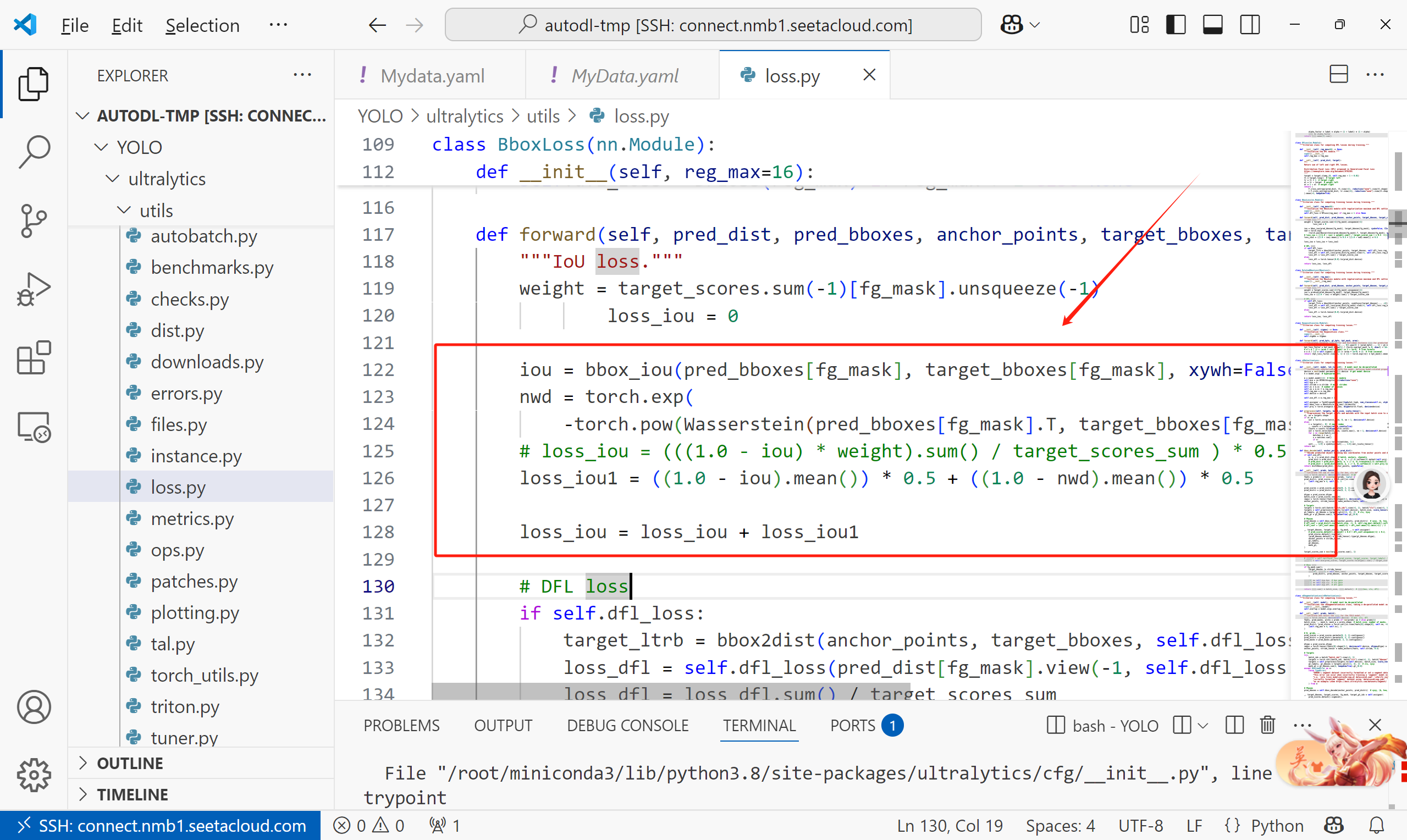
loss_iou = 0
iou = bbox_iou(pred_bboxes[fg_mask], target_bboxes[fg_mask], xywh=False, CIoU=True)
nwd = torch.exp(
-torch.pow(Wasserstein(pred_bboxes[fg_mask].T, target_bboxes[fg_mask], xywh=False), 1 / 2) / 1.0)
# loss_iou = (((1.0 - iou) * weight).sum() / target_scores_sum ) * 0.5 +(((1.0 - nwd) * weight).sum() / target_scores_sum ) * 0.5
loss_iou1 = ((1.0 - iou).mean()) * 0.5 + ((1.0 - nwd).mean()) * 0.5
loss_iou = loss_iou + loss_iou1
接下来运行起来即可,下面展示epochs=5:(稳定运行!)



















 5921
5921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











