<think>我们被要求使用VEX在Houdini中计算一个几何体的有向边界框(OrientedBoundingBox,OBB)。OBB是包围几何体的一个最小体积的矩形框,其方向由几何体的分布决定,通常通过主成分分析(PCA)来找到。步骤:1.获取几何体的点位置。2.计算这些点的协方差矩阵。3.对协方差矩阵进行特征值分解,得到特征向量(即主方向)。4.将点变换到由特征向量构成的新坐标系(主成分空间),然后计算该空间中的轴对齐边界框(AABB)。5.将AABB的8个角点变换回原始空间,即得到OBB的角点。注意:在Houdini中,我们可以通过VEX代码在PointWrangle或DetailWrangle中实现。这里我们选择在DetailWrangle上运行,因为我们需要整个几何体的点。代码结构:-获取所有点位置。-计算协方差矩阵。-使用eigenvalues()函数进行特征值分解(注意:VEX中有一个函数eigenvalues()可以同时得到特征值和特征向量)。-构建变换矩阵(以特征向量为轴,并考虑中心点)。-变换所有点到新坐标系,计算AABB。-计算AABB的8个角点,然后变换回世界坐标系。但是,VEX中并没有直接提供协方差矩阵计算的函数,也没有特征值分解的函数(实际上,在VEX中,eigenvalues函数用于对称矩阵的特征值分解,返回特征值和特征向量)。因此,我们需要手动计算协方差矩阵。协方差矩阵的计算公式(对于点集P,每个点p,中心c):Cov=(1/(n-1))*Σ((p-c)*(p-c)^T)但注意,我们也可以使用另一种方法:Cov=(1/(n-1))*(P^T*P-n*c*c^T)[不过更直接的是用循环]由于VEX中没有矩阵乘法,我们需要用循环计算。步骤详细:1.计算点集中心(均值)c。2.初始化一个3x3的协方差矩阵(设为0)。3.遍历每个点:计算(p-c)的外积(并加到协方差矩阵上)。4.然后除以n-1(样本协方差)或除以n(总体协方差),但通常用样本协方差(n-1)。注意:在计算特征向量时,我们使用的是对称矩阵,所以特征向量是正交的。实现代码:我们将在DetailWrangle中运行以下代码。注意:如果点数量很少(比如少于2个),则无法计算协方差,需要处理。另外,特征值分解函数:eigenvalues(matrix3cov)会返回一个3x3的矩阵(特征向量按列排列,对应特征值从大到小)和一个向量(特征值,从大到小)。但实际上,VEX的eigenvalues()函数返回两个值:特征值向量和特征向量矩阵(每列是一个特征向量)。具体函数原型:`inteigenvalues(matrix3m;vector&eigenvalues;matrix3&eigenvectors)`,返回1表示成功。但是,在VEX中,我们也可以使用`eigenvalues()`的另一种形式:`vectoreigenvalues=eigenvalues(matrix,&eigenvectors)`,但注意这个函数只支持对称矩阵。因此,我们按以下步骤:1.获取点云,计算中心。2.计算协方差矩阵。3.对协方差矩阵进行特征值分解,得到特征向量(主方向)。4.构建一个从世界空间到主成分空间的变换矩阵(旋转矩阵,注意方向)。这个变换矩阵应该是特征向量构成的矩阵(按列),并且是正交矩阵,所以逆矩阵就是转置。5.将每个点减去中心后,乘以旋转矩阵的转置(即变换到主成分空间),然后在主成分空间中计算AABB(即最小最大坐标)。6.有了主成分空间中的AABB(8个角点),再通过逆变换(乘以旋转矩阵,再加上中心)变换回世界空间,得到OBB的8个角点。注意:由于主成分空间是以中心为原点,所以变换后需要再加回中心。代码实现:我们将创建一个自定义函数来构建协方差矩阵,然后进行特征值分解。由于VEX在DetailWrangle中运行,我们可以创建一个属性(例如obb)来存储OBB的角点,或者直接创建一个新的几何体(但Wrangle不能创建新几何体,所以我们可以输出到其他节点处理)。这里,我们选择计算OBB的8个点,并将它们存储在一个数组中,然后创建一个新几何体(使用addpoint和addprim)来绘制OBB盒子。但是,在DetailWrangle中,我们只能修改当前Detail的属性,不能创建新的几何体。因此,我们可以:-将计算出的8个点位置存储在一个Detail属性中(数组类型),然后通过其他节点(如Python节点)来创建盒子。-或者,我们可以在同一个DetailWrangle中创建新的点和多边形(但注意,DetailWrangle通常用于处理属性,创建几何体需要特殊处理,实际上在DetailWrangle中也可以使用addpoint和addprim,但需要小心)。这里,我们选择在DetailWrangle中直接创建OBB的点和线框。步骤:-计算8个角点。-添加8个点(使用addpoint函数)。-添加一个多边形(使用addprim函数,类型为"poly")来连接这些点形成盒子。注意:OBB盒子是一个六面体,我们需要添加12条边(或6个面)。通常,我们添加6个四边形面。但是,为了简单,我们可以只添加线框(即12条边)。这里我们创建一个线框盒子。或者,我们也可以创建一个封闭的多边形盒子(带面)。这里我们创建线框。创建线框:我们需要添加12条线段(每条线段是一个primitive,类型为"polyline")?或者添加一个包含多个线段的primitive?通常,每个线段是一个单独的primitive(类型为"poly"且只有两个点)或者使用一个primitive包含多个线段(使用折线,但折线是连续的,而盒子不是连续的一条折线)。所以,我们选择添加12条单独的线段。另一种方法是创建一个闭合的折线(但盒子需要12条线段,且不能一笔画),所以还是分开添加。代码步骤:1.获取所有点,计算中心。2.计算协方差矩阵(3x3)。3.特征值分解,得到特征向量(按特征值从大到小排列,即第一列对应最大特征值,为主方向)。4.将点集变换到特征向量空间(减去中心后,乘以特征向量矩阵的转置),然后计算变换后点的最小和最大坐标(即AABB)。5.计算AABB的8个角点(在特征向量空间中)。6.将这些角点变换回世界空间(乘以特征向量矩阵,再加上中心)。7.创建8个点(位置为变换回世界空间的8个角点)。8.创建12条线段(使用addprim(0,"poly",pt1,pt2)来添加,注意每个线段需要两个点)。注意:8个角点的索引顺序,我们可以按照标准AABB的角点顺序:0:(minx,miny,minz)1:(maxx,miny,minz)2:(maxx,maxy,minz)3:(minx,maxy,minz)4:(minx,miny,maxz)5:(maxx,miny,maxz)6:(maxx,maxy,maxz)7:(minx,maxy,maxz)然后连接线段(共12条):底部4条:0-1,1-2,2-3,3-0顶部4条:4-5,5-6,6-7,7-4垂直4条:0-4,1-5,2-6,3-7代码实现:注意:在DetailWrangle中,我们运行一次(在第一个点或最后一个点?实际上DetailWrangle对每个Detail运行一次,所以如果只有一个Detail,就运行一次)。因此,我们可以在Detail0上运行。但是,如果输入的几何体有多个部分(比如多个物体),那么可能需要分别计算。这里我们假设输入是一个连续的几何体。代码:由于计算量较大,我们注意性能(点很多时,特征值分解是固定的3x3,所以很快)。开始写代码:注意:VEX中矩阵是行优先还是列优先?在变换时,我们通常将特征向量矩阵按列排列,但VEX中矩阵的构造是行优先的。所以,如果我们得到特征向量矩阵(3x3),其第一列是第一个特征向量,那么我们在构造矩阵时,第一行就是第一个特征向量吗?不,应该是列。实际上,在VEX中,矩阵的构造是:matrix3m={{a,b,c},{d,e,f},{g,h,i}};//这样构造的是三行:第一行a,b,c;第二行d,e,f;第三行g,h,i。但特征向量矩阵我们通常按列存储,即:[v0.x,v1.x,v2.x][v0.y,v1.y,v2.y][v0.z,v1.z,v2.z]其中v0是第一特征向量(对应最大特征值),v1是第二,v2是第三。然而,eigenvalues()函数返回的特征向量矩阵是:每一列是一个特征向量,且按特征值降序排列(第一列最大特征值对应的特征向量)。所以,如果我们用matrix3eigvecs;然后eigenvalues(cov,eigvecs)(注意:这个函数在VEX中不存在,我们需要用另一种形式)。实际上,VEX中的特征值分解函数有两个:eigenvalues()用于对称矩阵,返回特征值向量,并通过第三个参数返回特征向量矩阵(按列排列,特征值从大到小对应的列)。函数原型:`vectoreigenvalues(matrix3covariance_matrix;matrix3&eigenvectors)`所以,我们这样调用:vectorevalues;matrix3evecs;evalues=eigenvalues(cov,evecs);//注意:这个函数在Houdini的VEX中是否存在?实际上,在Houdini18及以上,我们可以这样用。但是,根据文档,正确的函数是:`inteigen(matrix3input;vector&eigenvalues;matrix3&eigenvectors)`,并且返回成功与否。不过,在Houdini18.5的VEX中,我们可以使用`eigenvalues`函数,它返回特征值向量,同时通过引用参数返回特征向量矩阵。所以,我们这样写:matrix3cov=...;//协方差矩阵vectoreval;matrix3evec;eval=eigenvalues(cov,evec);//这里evec将是一个矩阵,每列是一个特征向量,第一列对应最大特征值。现在,我们有了特征向量矩阵evec,它可以将点变换到主成分空间。变换矩阵是evec的转置(因为新基是evec的列向量,所以从世界坐标到新坐标的变换是:P_new=(P_world-center)*transpose(evec)?实际上,因为基变换的矩阵是R,如果新基的矩阵是A(列向量为基),那么变换到新基的坐标是:x_new=A^{-1}*(x_world-center)。由于A是正交矩阵(特征向量正交),所以A^{-1}=A^T。因此,变换为:x_new=(x_world-center)*A(这里将向量视为行向量,乘以矩阵)?或者我们使用列向量:x_new=A^T*(x_world-center)在VEX中,我们通常使用行向量还是列向量?在变换时,矩阵左乘列向量,但在VEX中,我们通常使用向量在右边乘以矩阵(即矩阵在左边,向量在右边)?实际上,VEX中的矩阵乘法是:向量乘以矩阵(向量在左,矩阵在右)得到行向量的变换?还是矩阵乘以向量(矩阵在左,向量在右)得到列向量的变换?在VEX中,矩阵乘法运算符`*`支持:vectorv=m*v;//矩阵在左,向量在右,表示矩阵乘以列向量(得到列向量)或者v*m表示行向量乘以矩阵(得到行向量)我们通常使用矩阵左乘向量(即列向量变换)。因此,将点p变换到主成分空间:vectorp_local=evec*(p-center);//这样对吗?不对,因为evec的列是特征向量,而evec*v表示将v变换到由特征向量为基的空间?实际上,如果evec是旋转矩阵,那么它可以将点从原始空间旋转到新空间。但是,这个旋转将特征向量方向旋转到坐标轴方向。因此,我们使用:p_local=(p-center)*evec;//这样是行向量乘以矩阵,相当于将evec的列向量作为基,得到新坐标。但是,我们也可以使用:p_local=evec*(p-center);//这表示将特征向量矩阵作为旋转矩阵作用于向量(p-center),得到在新基下的坐标(列向量形式)?实际上,这两种方式取决于我们的基变换方式。然而,由于evec是正交矩阵,所以两种方式都可以,但转置关系。我们使用哪种?我们需要保证变换后的坐标轴与特征向量对齐。实际上,如果我们使用:p_local=evec*(p-center);那么,新坐标系的x轴方向就是evec的第一行?不对,应该是第一列。因为矩阵左乘向量,矩阵的第一列就是新坐标系的x轴方向(在原始空间中的表示)。但是,我们想要的是:将点投影到特征向量上得到坐标。所以,点p在特征向量v0上的坐标应该是dot(v0,p-center)。而v0是evec的第一列,那么用矩阵乘法表示就是:evec的转置乘以(p-center)(作为列向量)?即:p_local=(p-center)*evec;//因为行向量乘以矩阵,相当于矩阵的转置乘以行向量的转置(即列向量),所以这里行向量乘以矩阵得到的分量是:点乘每个特征向量(矩阵的每一行)?不对。让我们重新考虑:设基变换矩阵R,其列向量为新的基(单位正交基),那么一个向量v在原始空间中的坐标v_old,在新空间中的坐标v_new满足:v_old=R*v_new(因为R的每一列是一个基向量,所以将新坐标乘以基向量再相加就得到原始空间向量)。因此,v_new=R^{-1}*v_old=R^T*v_old(因为R是正交矩阵)。所以,变换公式为:v_new=R^T*v_old在VEX中,如果我们用矩阵表示R(列向量是特征向量),那么R^T就是evec的转置。因此,变换为:v_new=evec.transpose()*v_old或者,我们也可以写成:v_new=v_old*evec(因为行向量v_old乘以矩阵evec,相当于v_old*evec=(evec.transpose()*v_old.transpose()).transpose(),即列向量的转置,所以行向量结果)。但是,如果我们使用行向量,那么:v_new=v_old*evec//这里v_old是行向量,evec是矩阵,结果v_new也是行向量,其分量就是v_old在evec的每一行(即evec转置的列)上的投影?不对,实际上,矩阵乘法是:v_new[i]=dot(v_old,evec[i])?不对,应该是:v_new=v_old*evec表示:v_new.x=v_old.x*evec.xx+v_old.y*evec.yx+v_old.z*evec.zxv_new.y=...?这并不等于投影。为了避免混淆,我们使用矩阵乘法:v_new=evec.transpose()*(v_old)(将v_old视为列向量)。在VEX中,我们可以这样写:vectorv_new=evec*v_old;//这样写对吗?不对,因为evec是列向量为特征向量的矩阵,而evec*v_old(列向量)得到的是:将v_old用特征向量基线性组合,而不是投影到特征向量基上。实际上,我们想要的是:新坐标是v_old在特征向量基上的坐标(即投影),而特征向量基是正交的,所以坐标分量就是点积:v_new.x=dot(evec_col0,v_old);v_new.y=dot(evec_col1,v_old);v_new.z=dot(evec_col2,v_old);而evec_col0就是evec的第一列,即evec的x列(evec[0]是evec的第一行,所以第一列是set(evec.xx,evec.yx,evec.zx)?在VEX中,矩阵的索引:evec.mXX,其中XX是行和列(从0开始)。例如,evec[0]是向量(第一行),evec[0][0]是第一行第一列。所以,要取第一列,我们可以用:evec.m00,evec.m10,evec.m20。因此,我们可以手动计算点积,但这样效率低。我们也可以构建转置矩阵,然后乘以向量:matrix3etrans=evec.transpose();vectorv_new=etrans*v_old;这样,etrans的第一行就是evec的第一列,所以etrans*v_old就是:v_new.x=dot(etrans[0],v_old)=dot(evec_col0,v_old)所以,我们使用:v_new=(evec.transpose())*v_old;但是,转置矩阵乘以向量,在VEX中也可以写成:v_new=v_old*evec(行向量乘以矩阵,相当于转置矩阵乘以向量的转置,但这里我们使用列向量,所以不能直接这样用)。因此,我们明确使用:vectorv_old=p-center;vectorv_new=evec.transpose()*v_old;或者,我们可以直接写成:v_new=v_old*evec;//在VEX中,这是行向量乘以矩阵,计算的是:v_new.x=dot(v_old,evec.col0)?不对,实际上,行向量v_old乘以矩阵evec,结果是:v_new.x=v_old.x*evec.xx+v_old.y*evec.xy+v_old.z*evec.xzv_new.y=v_old.x*evec.yx+v_old.y*evec.yy+v_old.z*evec.yzv_new.z=v_old.x*evec.zx+v_old.y*evec.zy+v_old.z*evec.zz而evec.xx,evec.xy,evec.xz是evec的第一行(即特征向量矩阵的第一行,但特征向量矩阵的列是特征向量,所以第一行并不是特征向量)。所以,这样计算并不是投影到特征向量上。因此,我们选择:v_new=evec.transpose()*v_old;这样,代码为:vectorv_old=p-center;vectorv_new=evec.transpose()*v_old;但是,我们也可以不转置,而是使用点积函数,但那样需要循环。所以,我们使用转置。接下来,我们遍历所有点,计算它们在主成分空间中的坐标,然后找出最小和最大值(即AABB)。然后,我们计算AABB的8个角点(在主成分空间中),这些角点就是每个维度取最小或最大组合而成。然后,将每个角点变换回世界空间:v_old=evec*v_new+center(因为v_new是主成分空间中的向量,左乘evec(特征向量矩阵)将其变换回原始空间,再加上中心)。所以,代码步骤:1.获取点位置,计算中心。2.计算协方差矩阵。3.特征值分解得到evec(特征向量矩阵)。4.转置evec得到变换矩阵(用于世界->主成分空间)。5.遍历所有点,变换到主成分空间,并记录最小和最大值(min_extent,max_extent)。6.根据min_extent和max_extent计算8个角点(在主成分空间)。7.将每个角点变换回世界空间(使用逆变换:v_old=evec*v_new+center)。8.添加8个点(位置为变换后的世界坐标)。9.添加12条线段(使用addprim,类型为"poly",然后添加两个顶点)。注意:我们可能在一个已经有其他点的几何体上运行,所以创建新点不会影响原始点。但我们也可以先删除原始几何体,或者在一个新的节点中运行。这里,我们假设在DetailWrangle中运行,并且我们希望保留原始点,同时添加OBB的线框。所以,我们添加新点和新线段。代码实现:由于代码较长,我们分块写。注意:如果点集为空,或者点数少于3,则协方差矩阵可能无法计算(特征值分解需要至少2个点?但1个点也可以,但OBB没有意义)。我们做一下检查。开始写代码:在DetailWrangle中(运行于Detail,即整个几何体一次):</think>以下是在Houdini中使用VEX计算Oriented Bounding Box (OBB)的完整实现方法。OBB的核心是找到几何体的主方向(通过PCA分析),然后沿这些方向计算边界框:
### 实现原理
1. **计算点云中心**:所有点的平均值
2. **计算协方差矩阵**:确定几何体的分布方向
3. **特征值分解**:获取主方向向量
4. **坐标变换**:将点转换到主方向空间
5. **计算AABB**:在变换空间中求轴对齐边界框
6. **逆变换角点**:将AABB角点转回世界空间
### VEX代码实现 (Detail Wrangle)
```vex
// 获取所有点位置
int pts[] = expandpointgroup(0, "!*"); // 选择所有点
vector positions[];
foreach(int pt; pts) {
positions.push(point(0, "P", pt));
}
// 1. 计算中心点
vector center = 0;
foreach(vector pos; positions) {
center += pos;
}
center /= len(positions);
// 2. 计算协方差矩阵
matrix3 cov = 0;
foreach(vector pos; positions) {
vector delta = pos - center;
cov += outerproduct(delta, delta); // 外积累加
}
cov /= len(positions); // 协方差矩阵
// 3. 特征值分解获取主方向
matrix3 eigenvectors;
vector eigenvalues = eigen(cov, eigenvectors); // 特征向量按重要性排序
// 4. 构建变换矩阵
matrix3 rot = eigenvectors.transpose(); // 旋转矩阵
matrix3 invrot = eigenvectors; // 逆旋转矩阵
// 5. 变换点到局部空间并计算AABB
vector min_extent = {1e20, 1e20, 1e20};
vector max_extent = {-1e20, -1e20, -1e20};
foreach(vector pos; positions) {
vector local_pos = rot * (pos - center);
min_extent = min(min_extent, local_pos);
max_extent = max(max_extent, local_pos);
}
// 6. 计算OBB的8个角点(局部空间)
vector corners[] = {
set(min_extent.x, min_extent.y, min_extent.z),
set(max_extent.x, min_extent.y, min_extent.z),
set(max_extent.x, max_extent.y, min_extent.z),
set(min_extent.x, max_extent.y, min_extent.z),
set(min_extent.x, min_extent.y, max_extent.z),
set(max_extent.x, min_extent.y, max_extent.z),
set(max_extent.x, max_extent.y, max_extent.z),
set(min_extent.x, max_extent.y, max_extent.z)
};
// 7. 将角点转回世界空间并创建OBB
int new_pts[8];
for(int i=0; i<8; i++) {
vector world_pos = invrot * corners[i] + center;
new_pts[i] = addpoint(0, world_pos);
}
// 创建OBB线框(12条边)
int edges[] = {0,1, 1,2, 2,3, 3,0, 4,5, 5,6, 6,7, 7,4, 0,4, 1,5, 2,6, 3,7};
for(int i=0; i<len(edges); i+=2) {
int prim = addprim(0, "polyline");
addvertex(0, prim, new_pts[edges[i]]);
addvertex(0, prim, new_pts[edges[i+1]]);
}
```
### 使用说明
1. 创建Geometry节点并连接需要计算OBB的几何体
2. 添加`Point Wrangle`(设置为Detail模式)
3. 粘贴上述代码到VEX编辑器
4. 结果将生成OBB线框:
- 8个角点(point)
- 12条边(polyline primitives)
### 关键参数说明
| 变量 | 说明 |
|------|------|
| `eigenvectors` | 三个主方向(按重要性排序) |
| `min_extent/max_extent` | 局部空间中的AABB范围 |
| `rot/invrot` | 主方向空间与世界空间的变换矩阵 |
| `corners` | OBB的8个角点局部坐标 |
### 可视化优化建议
1. 添加`Color`节点为OBB线框着色
2. 使用`Attribute Wrangle`添加`@pscale`控制点大小
3. 添加`Normal`节点计算面法向生成实体盒子
### 性能提示
- 对于动态几何体:将代码封装在`SOP Solver`中
- 大型点云:使用`pcfind()`进行点采样减少计算量
- 实时更新:绑定到`TimeSlider`或`Frame`参数





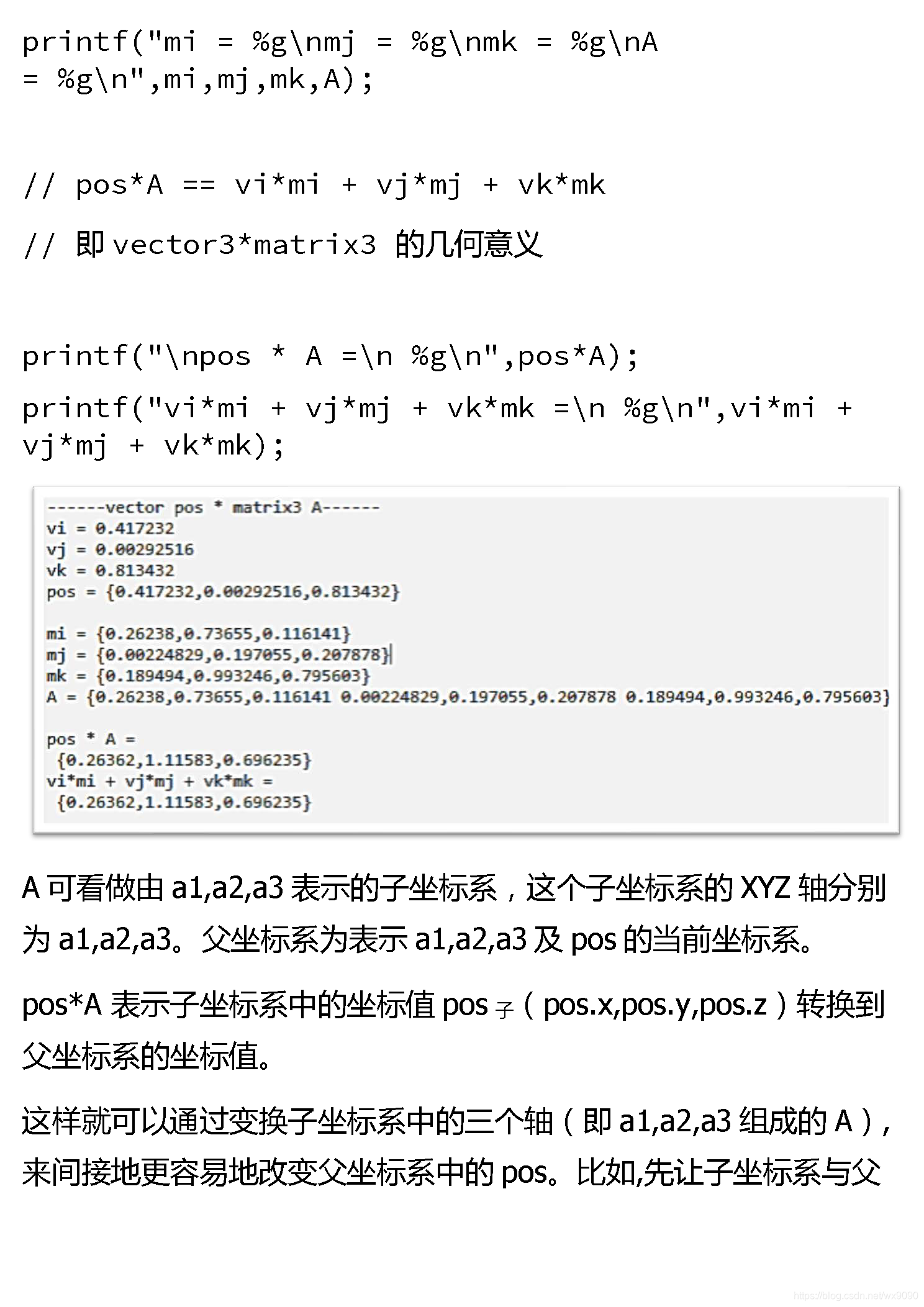
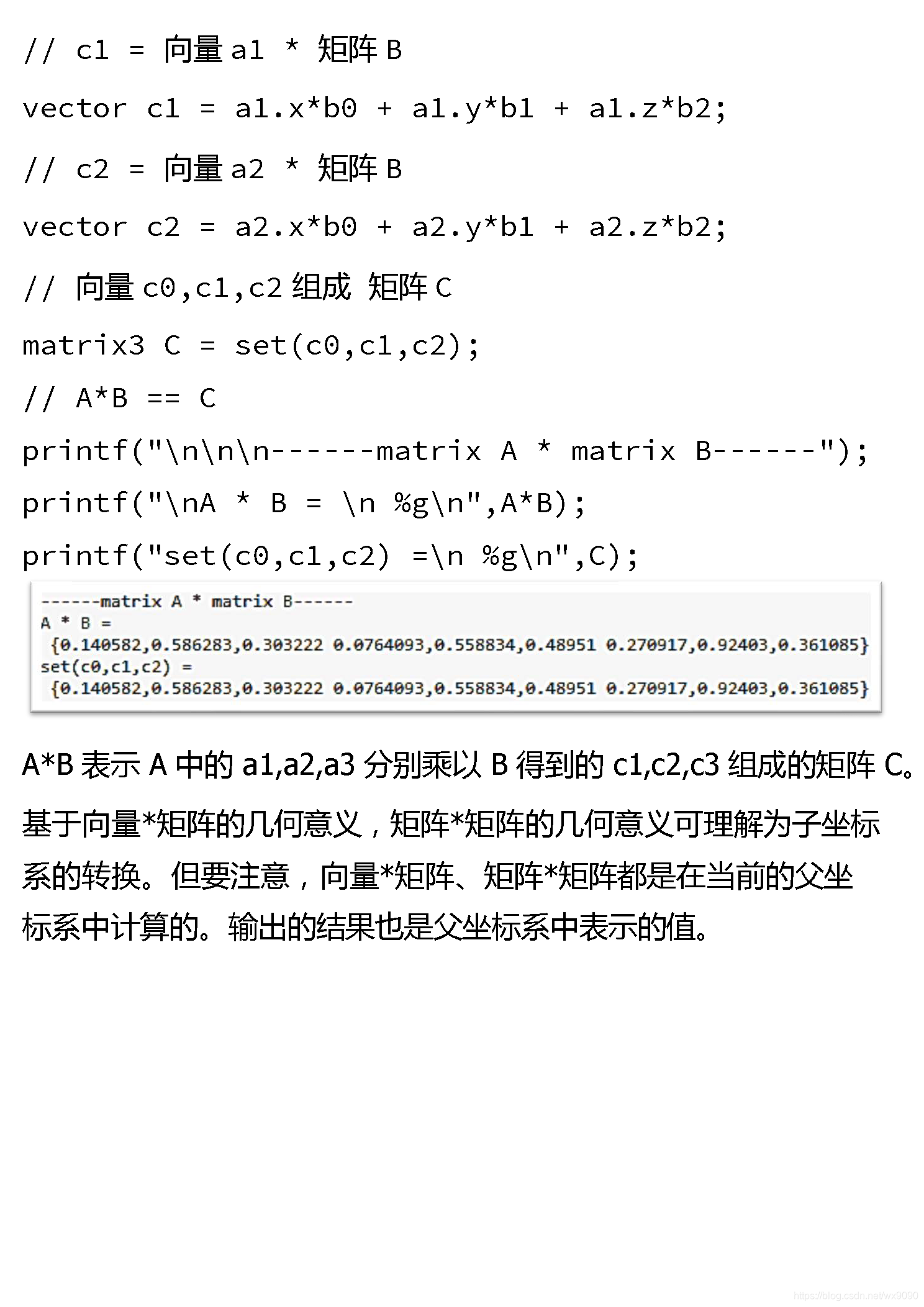
 博客围绕坐标系转换展开,涉及子坐标系与父坐标系,还提及Matrix在其中的应用,属于信息技术领域中图形处理等相关内容。
博客围绕坐标系转换展开,涉及子坐标系与父坐标系,还提及Matrix在其中的应用,属于信息技术领域中图形处理等相关内容。
 1344
1344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























