<think>我们处理的是速腾聚创RoboSense M1雷达的点云解析。M1是固态激光雷达,其数据格式与传统的机械式雷达不同。
主要步骤:
1. 安装驱动和依赖
2. 配置雷达参数
3. 解析数据包并转换为点云
4. 保存为PCD文件
注意:M1雷达的数据包结构不同于机械式雷达,需要按照其官方文档解析。</think>### 速腾RoboSense M1点云解析指南
RoboSense M1是固态激光雷达,其点云解析需要特殊处理。以下是完整的解决方案:
#### 1. M1雷达特性与数据格式
- **固态扫描模式**:非旋转式扫描,120°水平视场角
- **数据包结构**:
```c
struct M1_Packet {
uint8_t header[8]; // 包头 (0x55, 0xAA, 0x5A, 0xA5)
uint32_t timestamp; // 时间戳 (μs)
uint16_t block_count; // 数据块数量 (固定为6)
M1_Block blocks[6]; // 数据块
uint8_t tail[4]; // 包尾
};
struct M1_Block {
uint8_t channel_id; // 通道ID (0-127)
uint16_t azimuth; // 水平角度 (0.01°)
uint16_t elevation; // 垂直角度 (0.01°)
uint16_t distance; // 距离值 (mm)
uint8_t reflectivity; // 反射率
};
```
#### 2. Python点云解析实现
```python
#!/usr/bin/env python
import struct
import numpy as np
import pcl
from math import radians, sin, cos
def parse_m1_packet(packet_data):
"""解析M1单帧数据包"""
points = []
# 验证包头
if packet_data[0:4] != b'\x55\xaa\x5a\xa5':
raise ValueError("无效的M1数据包头")
# 解析时间戳和块数量
timestamp = struct.unpack('<I', packet_data[8:12])[0]
block_count = struct.unpack('<H', packet_data[12:14])[0]
# 解析每个数据块 (每块128个点)
for block_idx in range(block_count):
block_offset = 14 + block_idx * 1024 # 每个块1024字节
for point_idx in range(128): # 每块128个点
point_offset = block_offset + point_idx * 8
point_data = packet_data[point_offset:point_offset+8]
# 解析点数据
channel, azimuth, elevation, distance, reflectivity = struct.unpack(
'<BHHHB', point_data)
# 转换为3D坐标
x, y, z = polar_to_cartesian(
distance / 1000.0, # 毫米转米
azimuth / 100.0, # 0.01度转度
elevation / 100.0
)
points.append([x, y, z, reflectivity])
return points, timestamp
def polar_to_cartesian(distance, azimuth, elevation):
"""极坐标转笛卡尔坐标"""
az_rad = radians(azimuth)
el_rad = radians(elevation)
xy_dist = distance * cos(el_rad)
x = xy_dist * sin(az_rad)
y = xy_dist * cos(az_rad)
z = distance * sin(el_rad)
return x, y, z
def save_pcd(points, filename):
"""保存为PCD文件"""
cloud = pcl.PointCloud_PointXYZI()
cloud.from_list(points)
pcl.save(cloud, filename, binary=True)
print(f"保存点云: {filename} (点数: {len(points)})")
# 示例使用
if __name__ == "__main__":
# 从文件读取数据包
with open('m1_packet.bin', 'rb') as f:
packet_data = f.read()
# 解析并保存
points, timestamp = parse_m1_packet(packet_data)
save_pcd(points, f"m1_cloud_{timestamp}.pcd")
```
#### 3. ROS实时解析节点
```python
#!/usr/bin/env python
import rospy
import struct
import numpy as np
from robosense_msgs.msg import RobosensePacket
from sensor_msgs.msg import PointCloud2, PointField
from pcl import PointCloud_PointXYZI
from pcl_helper import pcl_to_ros
class M1PointCloudParser:
def __init__(self):
rospy.init_node('m1_pointcloud_parser')
# 参数配置
self.frame_id = rospy.get_param('~frame_id', 'rs_m1')
self.pub_cloud = rospy.Publisher('/rs_m1/points', PointCloud2, queue_size=10)
rospy.Subscriber('/rslidar_packets', RobosensePacket, self.packet_callback)
rospy.loginfo("M1点云解析器已启动")
def packet_callback(self, packet):
try:
# 只处理M1数据包
if packet.packet_type != 2: # 2表示M1类型
return
# 解析点云
points, timestamp = self.parse_m1_packet(packet.data)
# 转换为ROS点云消息
cloud_msg = self.create_cloud_msg(points, packet.header.stamp)
self.pub_cloud.publish(cloud_msg)
except Exception as e:
rospy.logerr(f"解析错误: {str(e)}")
def parse_m1_packet(self, data):
"""解析M1数据包"""
# 解析逻辑同上...
# 返回点列表和时间戳
def create_cloud_msg(self, points, timestamp):
"""创建ROS PointCloud2消息"""
# 创建PCL点云
pcl_cloud = PointCloud_PointXYZI()
pcl_cloud.from_list(points)
# 转换为ROS消息
ros_cloud = pcl_to_ros(
pcl_cloud,
frame_id=self.frame_id,
stamp=timestamp
)
# 设置字段
ros_cloud.fields = [
PointField('x', 0, PointField.FLOAT32, 1),
PointField('y', 4, PointField.FLOAT32, 1),
PointField('z', 8, PointField.FLOAT32, 1),
PointField('intensity', 12, PointField.FLOAT32, 1)
]
return ros_cloud
if __name__ == '__main__':
M1PointCloudParser()
rospy.spin()
```
#### 4. 点云后处理技巧
**畸变校正** (因固态扫描特性)
```python
def motion_compensation(points, packet_time, imu_data):
"""使用IMU数据进行运动补偿"""
compensated_points = []
# 获取角速度和线速度
angular_vel = imu_data.angular_velocity
linear_vel = imu_data.linear_acceleration # 实际应用中需要积分
for point in points:
# 计算点相对于数据包开始的时间偏移
point_time = packet_time + point[4] # point[4]存储时间偏移
# 计算补偿量
time_diff = point_time - imu_data.header.stamp.to_sec()
rotation = angular_vel * time_diff
translation = linear_vel * time_diff
# 应用补偿
x, y, z = apply_transform(point[:3], rotation, translation)
compensated_points.append([x, y, z, point[3]])
return compensated_points
def apply_transform(point, rot, trans):
"""应用旋转和平移变换"""
# 简化的变换实现
x = point[0] + trans.x
y = point[1] + trans.y
z = point[2] + trans.z
return [x, y, z]
```
**点云过滤**
```python
import pcl
def filter_cloud(cloud):
"""应用多级过滤"""
# 1. 移除无效点
passthrough = cloud.make_passthrough_filter()
passthrough.set_filter_field_name("z")
passthrough.set_filter_limits(0.1, 10.0) # 保留0.1-10米高度
# 2. 统计离群点去除
sor = cloud.make_statistical_outlier_filter()
sor.set_mean_k(50) # 使用50个邻近点分析
sor.set_std_dev_mul_thresh(1.0) # 标准差阈值
# 3. 体素网格下采样
vg = sor.filter().make_voxel_grid_filter()
vg.set_leaf_size(0.02, 0.02, 0.02) # 2cm分辨率
return vg.filter()
```
#### 5. 配置与启动
**驱动配置 (config.yaml)**
```yaml
lidar:
- driver:
lidar_type: RSM1 # M1型号标识
frame_id: /rs_m1
device_ip: 192.168.1.200
msop_port: 6699
return_mode: 1 # 回波模式 (1=最强回波)
lidar_scan_path: /path/to/scan_file # M1专用扫描路径文件
```
**启动命令**
```bash
# 启动M1雷达
roslaunch rslidar_sdk start.launch lidar_type:=RSM1
# 启动点云解析节点
rosrun m1_parser m1_parser_node.py _frame_id:=/rs_m1
```
### 常见问题解决
1. **点云密度不足**:
```yaml
# 配置文件中增加分辨率参数
lidar:
- driver:
scan_mode: 2 # 0=标准, 1=增强, 2=高密度
```
2. **时间同步问题**:
```python
# 在解析器中添加PTP支持
def enable_ptp_sync():
# 配置PTP主时钟
os.system('sudo ptp4l -i eth0 -m -S')
# 雷达配置启用PTP
```
3. **点云畸变校正**:
- 使用IMU数据:`rosrun imu_filter madgwick_filter`
- 使用轮速计信息进行运动补偿
4. **坐标系对齐**:
```xml
<!-- 在URDF中添加M1雷达模型 -->
<link name="rs_m1"/>
<joint name="rs_m1_joint" type="fixed">
<parent link="base_link"/>
<child link="rs_m1"/>
<origin xyz="0.2 0 1.5" rpy="0 0 0"/>
</joint>
```
5. **性能优化**:
```python
# 使用Numba加速计算
from numba import jit
@jit(nopython=True)
def polar_to_cartesian_numba(distance, azimuth, elevation):
# 加速版的坐标转换
az_rad = np.radians(azimuth)
el_rad = np.radians(elevation)
xy_dist = distance * np.cos(el_rad)
return (
xy_dist * np.sin(az_rad),
xy_dist * np.cos(az_rad),
distance * np.sin(el_rad)
)
```




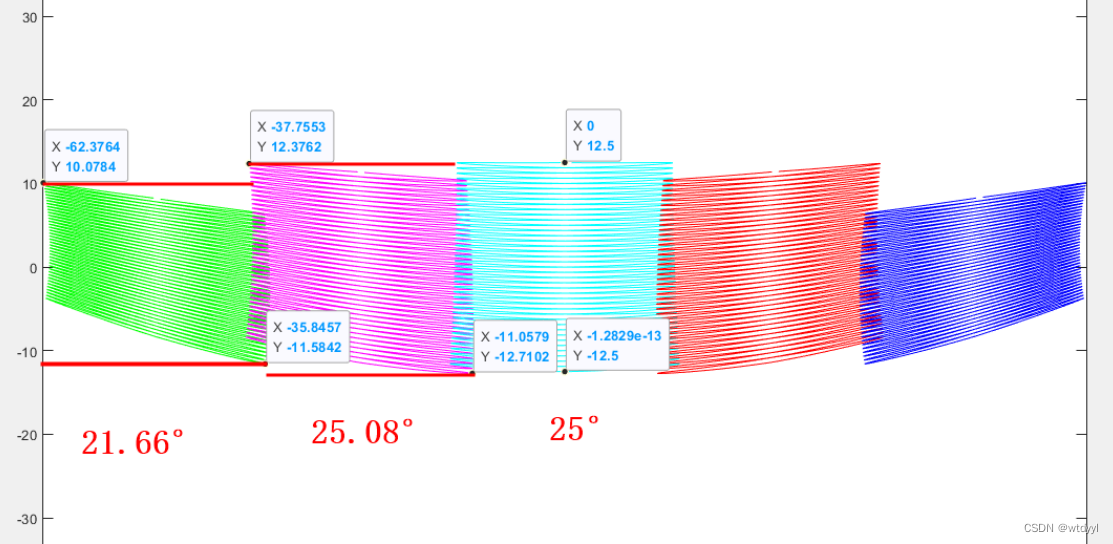
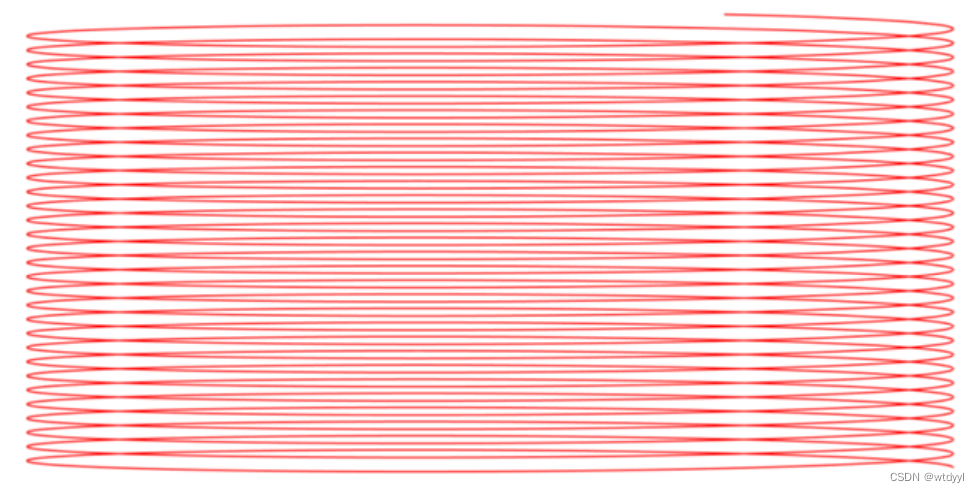
 本文详细介绍了速腾聚创RS-M1激光雷达的螺旋扫描方式,包括其5通道扫描机制、交叉区域、垂直和水平分辨率的特点,以及坐标系定义。尽管通道间存在物理错开,但通过标定不影响精度。
本文详细介绍了速腾聚创RS-M1激光雷达的螺旋扫描方式,包括其5通道扫描机制、交叉区域、垂直和水平分辨率的特点,以及坐标系定义。尽管通道间存在物理错开,但通过标定不影响精度。

















 527
527






 到【灌水乐园】发言
到【灌水乐园】发言







