




微分冲击: 即使没有积分项(如纯PD控制),当误差发生剧烈变化(如突然检测到一个急弯),PD计算出的指令瞬间要求舵机转到极限位置。舵机以最大速度冲向极限位置的过程可能产生超调或振荡,也可能因为机械冲击影响稳定性。虽然这不严格叫“Windup”,但也是一种需要“抗饱和”处理的瞬态极限情况。
PD控制中的微分冲击问题,是智能车竞赛中影响稳定性的关键点,现在想深入解决纯PD控制下急弯导致的舵机瞬间打满问题。用户可能正在调试一辆高速智能车,在过S弯或直角弯时出现转向抖动甚至冲出赛道的情况。关于微分冲击的应对,需要从三个层面来考虑:首先是D项本身的处理(限幅和滤波),其次是设定值管理(避免突变),最后是系统级优化(路径规划),但可能更需要具体参数调整的技巧。
一是舵机响应速度这个隐藏因素很重要,很多队伍忽略了舵机最大转向角速度的限制。比如计算出的D项指令需要0.1秒转30度,但舵机实际最快只能0.2秒转30度,这时候再完美的算法也会出问题,这个要重点研究。
二是电感车还是摄像头车,两种传感器的噪声特性不同。电感车通常需要更强的低通滤波,而摄像头车在图像处理环节就可以做路径平滑。这个差异会影响D项限幅值的选择,需要补充说明。
三是调试方法论也很关键。一般都是只是知道调Kp/Kd,但其实应该先固定Kp调滤波参数,再调D项限幅,最后微调Kd。这个步骤在实战中能节省大量时间,值得展开。
针对PD控制中微分冲击导致的舵机瞬间饱和问题,以下是具体解决方案和实现细节,可显著提升车辆在急弯突变场景下的稳定性:
1. D项输出限幅(核心手段)
原理:限制微分项的最大贡献值,避免误差突变时D项产生过大冲击力。
实现方式:
// PD控制器伪代码
error = target_angle - current_angle; // 当前路径偏差
P = Kp * error; // 比例项
// 计算原始微分项
raw_D = Kd * (error - prev_error) / dt;
// 对D项限幅(关键!)
if (raw_D > D_MAX)
D = D_MAX;
else if (raw_D < -D_MAX)
D = -D_MAX;
else
D = raw_D;
// 合成输出 + 物理限幅
output = saturate(P + D, -45, 45); // 舵机输出限幅±45°
prev_error = error;调试技巧:
-
D_MAX取值:从舵机最大转向速度反推。
例:舵机0°→45°需时0.2秒 → 最大角速度 ≈ 225°/s →D_MAX = 225 * Kd(需实测调整)。 -
动态限幅:根据车速调整
D_MAX(高速时减小限幅值)。 -
效果:直角弯入弯时舵机转向更平滑,避免“甩尾式”振荡。
2. 设定值平滑(预防性策略)
原理:对路径规划输出的目标值(target_angle)进行滤波,避免指令突变。
实现方式:
// 一阶低通滤波(关键参数:滤波系数α)
filtered_target = α * new_target + (1 - α) * prev_target;
// 或使用斜率限制(更简单)
if (new_target - prev_target > MAX_DELTA)
filtered_target = prev_target + MAX_DELTA;
else if (new_target - prev_target < -MAX_DELTA)
filtered_target = prev_target - MAX_DELTA;
else
filtered_target = new_target;
prev_target = filtered_target;参数选择:
-
α取值:0.3~0.7(越小越平滑,但滞后越大)。 -
MAX_DELTA:根据舵机性能设定(例:10ms内最大角度变化≤5°)。 -
3. 路径规划优化(系统级解决)
策略:
-
前瞻距离动态调整:根据车速实时调整前瞻点距离,高速时增加前瞻距离,提前开始转向。
-
路径重采样:在曲率突变处(如直角弯)插入过渡点,强制生成平滑路径。
-
速度规划:在弯心前减速,降低离心力导致的路径跟踪误差。
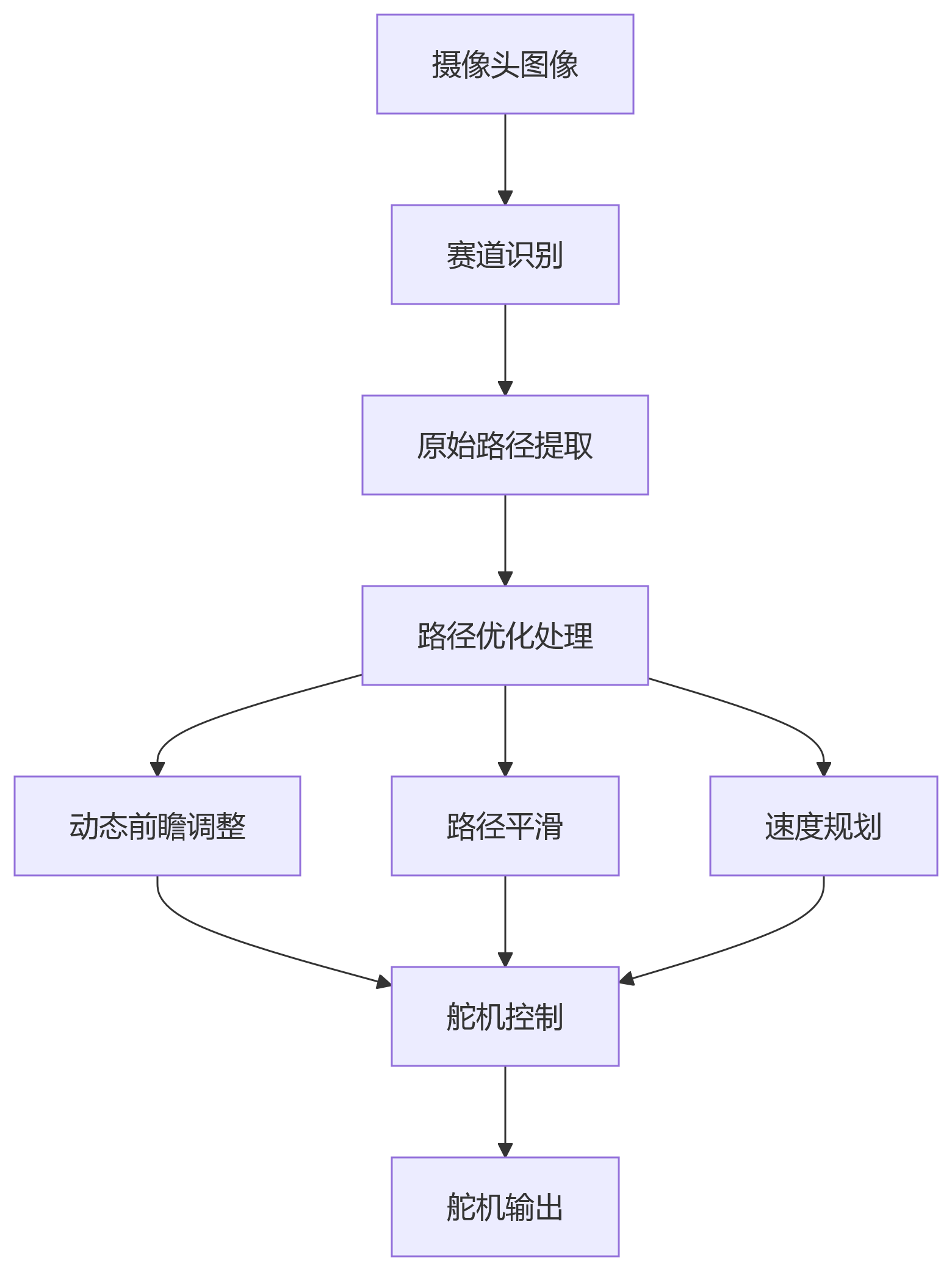
软件系统架构图概览
策略一:动态前瞻距离调整
原理说明
在高速行驶时,增大前瞻距离可以让车辆提前感知弯道,避免因突然检测到急弯导致PD控制器输出剧烈变化。前瞻距离根据车速动态调整:
-
低速时:0.3-0.5米(精细控制)
-
高速时:0.8-1.2米(提前转向)
C语言实现
#include <math.h>
// 动态前瞻配置参数
typedef struct {
float min_distance; // 最小前瞻距离 (0.3m)
float max_distance; // 最大前瞻距离 (1.2m)
float speed_factor; // 速度影响因子 (0.1-0.2)
float curve_factor; // 弯道影响因子 (0.3-0.5)
} LookaheadConfig;
// 计算动态前瞻距离
float calculate_dynamic_lookahead(float current_speed, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 599
599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









