










Mamba由于其出色的时序预测能力而受到广泛关注,最近也有一些工作(MambaTrack、TrackSSM)等被用在了多目标跟踪任务中,但它们都没有开源。为此,我复现了MambaTrack和TrackSSM,供大家学习参考。项目地址:https://github.com/JackWoo0831/Mamba_Trackers,如果您觉得有用,欢迎star!
十分欢迎大家提出宝贵意见(提issue或者pr),一起探索!
以下是仓库的使用说明:
Mamba (Selective State Space Model) for Multi-object tracking
✅介绍
此仓库是以下基于Mamba的多对象跟踪器的非官方实现:(这两篇论文尚未发布官方代码)
-
MambaTrack: A Simple Baseline for Multiple Object Tracking with State Space Model ACM MM’25
-
TrackSSM: A General Motion Predictor by State-Space Model arXiv:2409.00487
🗺️路线图
- [] 添加论文模型:探索多目标跟踪中基于学习的运动模型arXiv:2403.10826
🏃结果和模型权重
-支持数据集:DanceTrack、MOT17和VisDrone2019
DanceTrack-val 的可视化结果:
- 量化指标和模型权重
| Models | HOTA | MOTA | IDF1 | checkpoint |
|---|---|---|---|---|
| MambaTrack | 32.672 | 78.392 | 26.419 | Baidu Disk, code: e0mv |
| TrackSSM | 27.536 | 72.366 | 20.756 | Baidu Disk, code: 2797 |
正在尝试达到更好的性能
📑数据集准备
训练
为了训练基于Mamba的模型,所有数据都通过tools/gen_traj_data.py 转换为轨迹格式。
MOT17数据集,运行:
python tools/gen_traj_data.py --mot17 --save_name mot17
DanceTrack数据集,运行:
python tools/gen_traj_data.py --dancetrack --save_name dancetrack
VisDrone数据集,运行:
python tools/gen_traj_data.py --visdrone --save_name visdrone
记得根据您自己的路径修改DATA_ROOT
运行代码后,将在ssm_tracker/traj_anno_data中生成一个json文件。
推理
为了进行推理,我们首先对检测结果进行预处理。
首先,组织子文件夹“images”中的所有视频帧,然后按照以下格式进行“test”(或“val”):(与YOLO格式相同)
DanceTrack
|
|____images
|_____test
|_____dancetrack0001
|______xxxx.jpg
然后运行yolox检测器:
python tools/gen_det_results.py --dataset_name dancetrack --data_root /data/datasets/DanceTrack/images/ --split val --exp_file yolox_exps/custom/yolox_x.py --model_path weights/yolox_dancetrack.pth.tar --generate_meta_data
你可以参考
experiments/gen_yolox_det_results.sh
DanceTrack的预训练YOLOX-X模型可以从他们的huggingface仓库下载。检测结果见
./det_results
🔍模型和指南
所有Mamba式的模特都在./ssm_tracker下面,所有卡尔曼类模型都在./kalman_tracker`下面。
1. MambaTrack:
MambaTrack的架构如下:
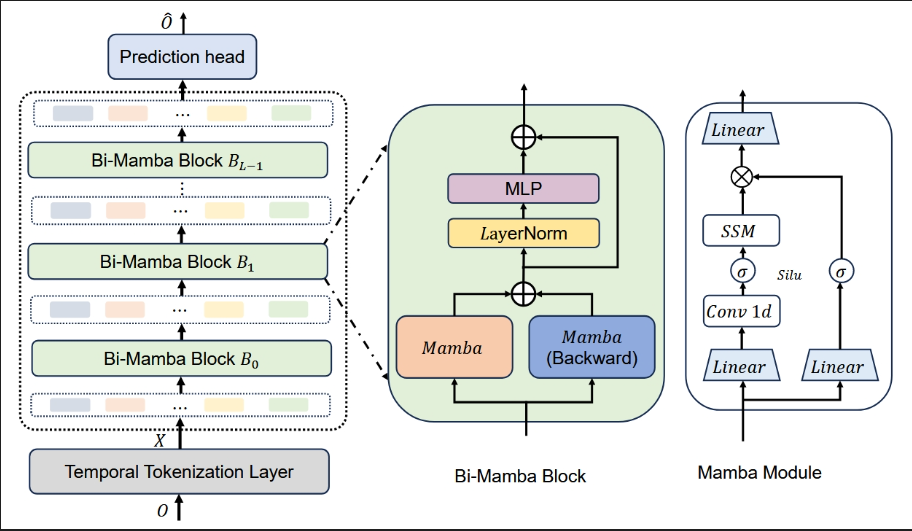
相应的配置文件是ssm_tracker/cfgs/MambaTrack.yaml
2.TrackSSM:
TrackSSM的架构如下:
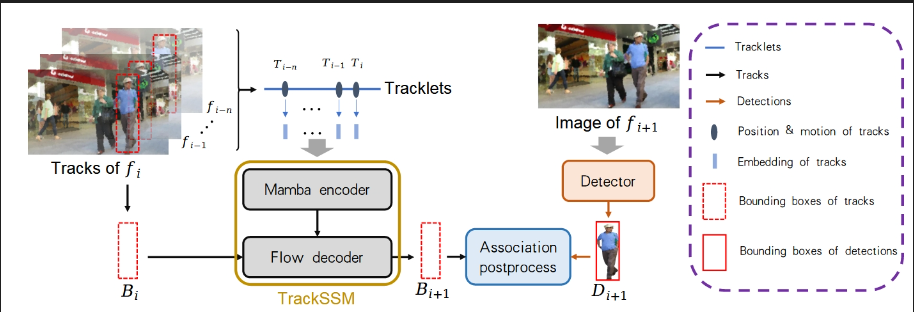
相应的配置文件是ssm_tracker/cfgs/TrackSM.yaml
3.训练
对于训练,请先修改bash文件experiments/train_ssm_tracker.sh中相应的’true’和’false’,然后运行:
sh experiments/train_ssm_tracker.sh
4.推理
为了进行测试,请首先修改bash文件experiments/inference_ssm_tracker.sh中相应的’true’和’false’,并修改以下参数:
1.--det_path:检测结果文件路径,包含{seq_name}.txt
2.-motion_model_path:训练好的权重路径
3.--config_file:与train相同
4.--data_root:数据集的路径,遵循yolo格式
然后运行
sh experiments/train_ssm_tracker.sh

















 6444
6444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









