#include <iostream>
#include<bits/stdc++.h>
using namespace std;
const int MaxVal = 9999;
const int n = 5;
//搜索到根节点和虚拟键的概率
double p[n + 1] = {0, 0.15, 0.1 , 0.05 , 0.1,0.2};
double q[n + 1] = {0.05, 0.1 ,0.05,0.05,0.05, 0.1};
int root[n + 1][n + 1];//记录根节点
double w[n + 2][n + 2];//子树概率总和
double e[n + 2][n + 2];//子树期望代价
void optimalBST(double *p,double *q,int n)
{
//初始化只包括虚拟键的子树
for (int i = 1;i <= n + 1;++i)
{
w[i][i - 1] = q[i - 1];
e[i][i - 1] = q[i - 1];
}
//由下到上,由左到右逐步计算
for (int len = 1 ; len <= n; len++ )
{
for (int j = n - len + 1 ; j <= n ; j++)
{
int i = n - len + 1;// i 从5到1
e[i][j] = MaxVal;
w[i][j] = w[i][j - 1] + p[j] + q[j];//公式推导、
/*
cout<<"w "<<i<<" "<<j - 1<<" "<<w[i][j - 1]<<endl;
cout<<"p "<<j<<" "<<p[j]<<endl;
cout<<"q "<<j<<" "<<q[j]<<endl;
cout<<"w "<<i<<" "<<j<<" "<<w[i][j]<<endl;
//cout<<"w"<<i<<j<<w[i][j]<<endl;
//cout<<w[i][j]<<endl;
getchar();
*/
//求取最小代价的子树的根
for (int k = i;k <= j;++k)
{
double temp = e[i][k - 1] + e[k + 1][j] + w[i][j];
if (temp < e[i][j])
{
/*
cout<<k<<endl;
cout<<i<<" "<<k-1<<"e "<<e[i][k - 1]<<endl;
cout<<k+1<<" "<<j<<"e "<<e[k + 1][j]<<endl;
cout<<i<<" "<<j<<"w "<<w[i][j]<<endl;
cout<<temp<<endl;
getchar();*/
e[i][j] = temp;
root[i][j] = k;
}
}
}
}
}
//输出最优二叉查找树所有子树的根
//打印最优二叉查找树的结构
//打印出[i,j]子树,它是根r的左子树和右子树
void printOptimalBST(int i,int j,int r)
{
int rootChild = root[i][j];//子树根节点
if (rootChild == root[1][n])
{
//输出整棵树的根
cout << "k" << rootChild << "是根" << endl;
printOptimalBST(i,rootChild - 1,rootChild);
printOptimalBST(rootChild + 1,j,rootChild);
return;
}
if (j < i - 1)
{
return;
}
else if (j == i - 1)//遇到虚拟键
{
if (j < r)
{
cout << "d" << j << "是" << "k" << r << "的左孩子" << endl;
}
else
cout << "d" << j << "是" << "k" << r << "的右孩子" << endl;
return;
}
else//遇到内部结点
{
if (rootChild < r)
{
cout << "k" << rootChild << "是" << "k" << r << "的左孩子" << endl;
}
else
cout << "k" << rootChild << "是" << "k" << r << "的右孩子" << endl;
}
printOptimalBST(i,rootChild - 1,rootChild);
printOptimalBST(rootChild + 1,j,rootChild);
}
int main()
{
optimalBST(p,q,n);
cout << "最优二叉树结构:" << endl;
printOptimalBST(1,n,1);
}







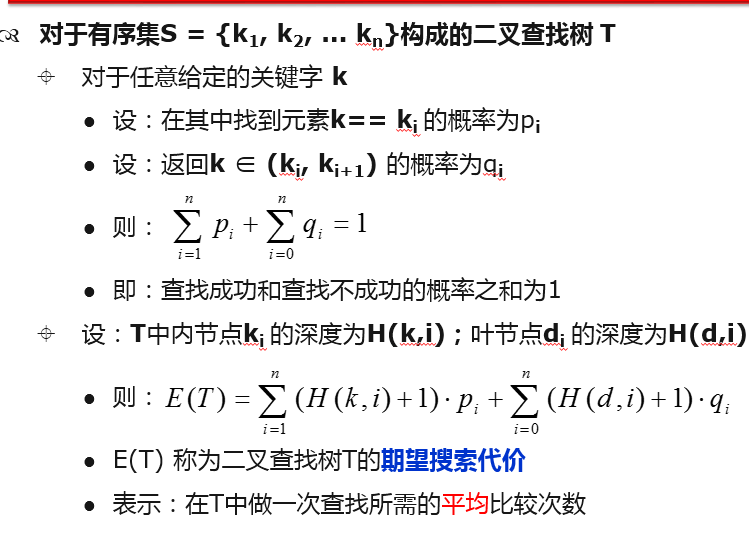
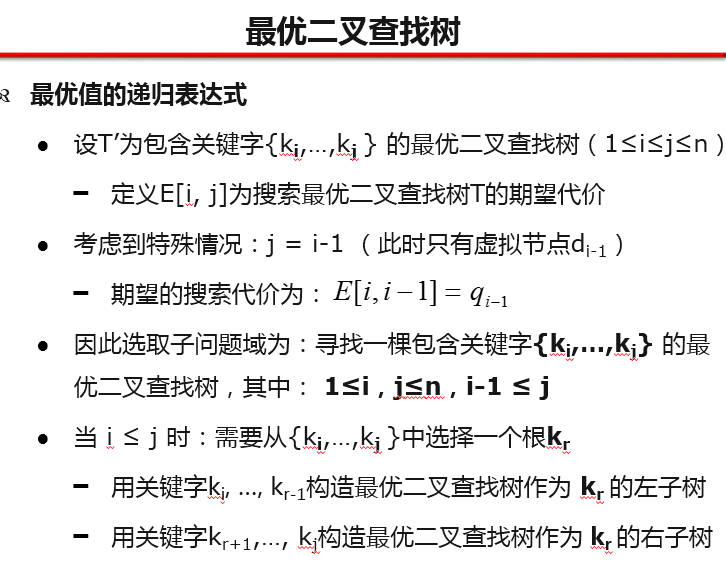
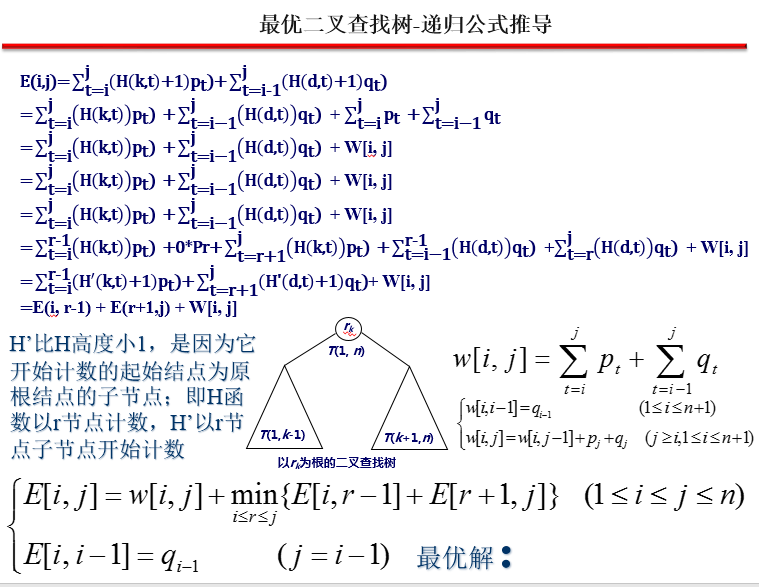
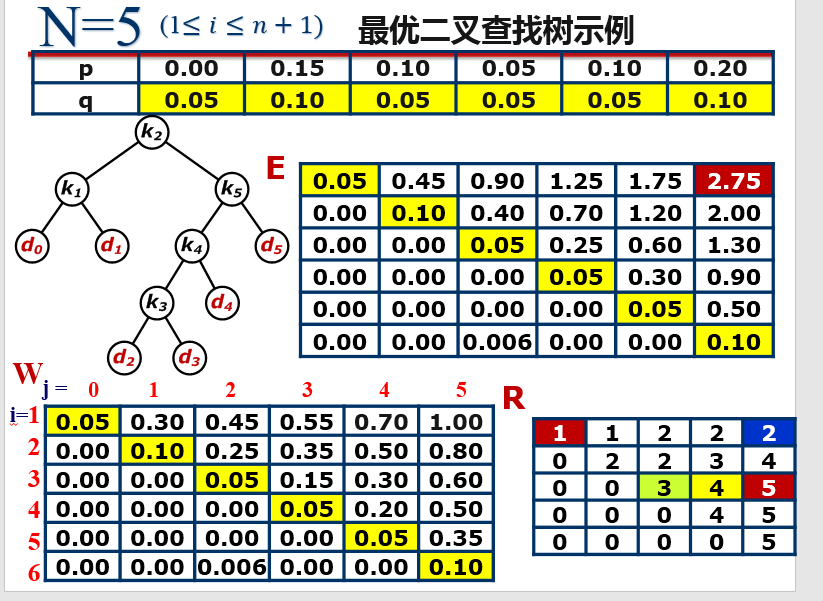
 本文详细介绍了如何使用动态规划方法构建最优二叉搜索树,以最小化搜索操作的平均成本。通过具体实例,展示了算法步骤,包括计算子树概率总和、期望代价以及确定根节点的过程。
本文详细介绍了如何使用动态规划方法构建最优二叉搜索树,以最小化搜索操作的平均成本。通过具体实例,展示了算法步骤,包括计算子树概率总和、期望代价以及确定根节点的过程。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









