




 本文介绍了Lyapunov方法在非线性控制理论中的应用,包括Lyapunov函数的概念、如何构造Lyapunov函数以证明系统稳定性,以及线性化的Lyapunov间接方法。着重讨论了如何利用Lyapunov方法估计吸引域,指出需要考虑轨线在定义域内的行为以确保稳定性结论的有效性。
本文介绍了Lyapunov方法在非线性控制理论中的应用,包括Lyapunov函数的概念、如何构造Lyapunov函数以证明系统稳定性,以及线性化的Lyapunov间接方法。着重讨论了如何利用Lyapunov方法估计吸引域,指出需要考虑轨线在定义域内的行为以确保稳定性结论的有效性。
#本系列文章为笔者自学非线性控制理论的学习记录,如有不正之处欢迎指正
#参考书籍《非线性控制》Hassan K. Khalil
1.Lyapunov方法
1.1定理描述
设是包含原点的一个区域,
为定义在D上的局部Lipschitz函数,且
,令
是定义在D上的连续可微函数,且满足
则原点是f(x)的稳定平衡点,如果进一步有:
则原点是f(x)的渐进稳定平衡点。
如果,式(1)(3)对所有
均成立,且
则原点是全局渐进稳定的。
1.2直观解释
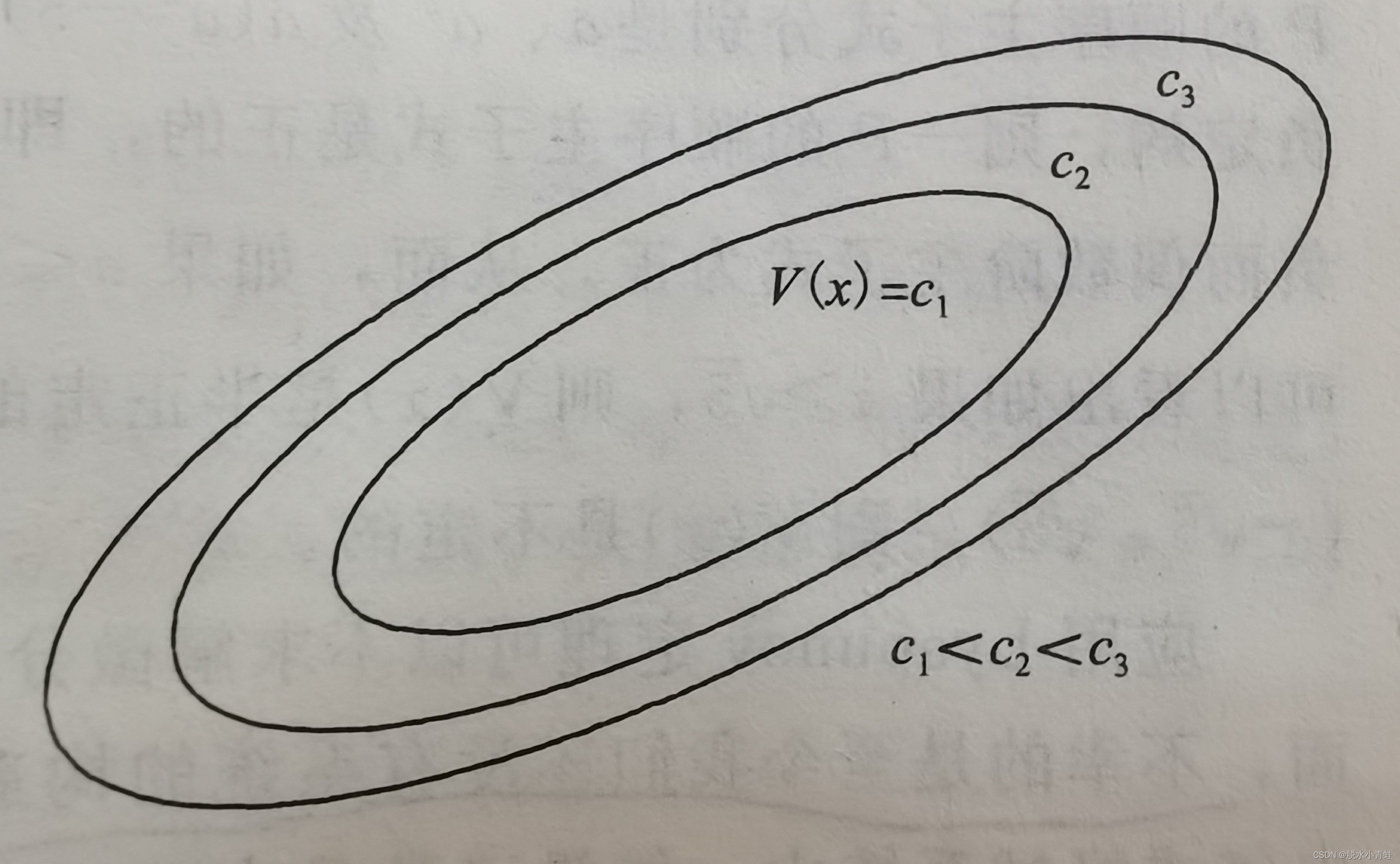
如果一个连续可微函数V(x)满足上述的定义,则称V(x)为Lyapunov函数,对固定的,集合
称为一个Lyapunov面。下图显示了伴随c的增加Lyapunov面的变动情况。式(2)表明,当轨线穿过某个Lyapunov面时,总是向集合
内部走的,并且不再出来。当满足式(3)时,轨线从一个Lyapunov面走向其内部c值更小的Lyapunov面,随着c的减小,最终Lyapunov面将收缩于原点,表明随着时间增长,轨线也将趋于原点。
注:Lyapunov定理的条件仅仅是充分的,备选Lyapunov函数不能满足稳定或渐进稳定条件,并不能说明平衡点是不稳定或非渐进稳定的,而只是表明该备选函数不能确定平衡点稳定的性质。
1.3构造Lyapunov函数的一般方法
变量梯度法:先研究的表达式,再选取
的参数,使
负定。方法介绍如下:
设为x的标量函数,设
,
沿着
轨线的导数
为:
下面选取g(x),它是正定函数的梯度,同时又使
负定。
g(x)为一标量函数的梯度当且仅当它的Jacobi矩阵是对称的,即
在此约束条件下,选择g(x)使是负定的,最终V(x)由下式积分求得:
2.线性化(Lyapunov间接方法)
当原点是非线性系统的平衡点时,其稳定性可以通过研究线性系统在该平衡点的稳定性得出。
定理1:设x=0是非线性系统的一个平衡点,f(x)在原点的一个邻域内连续可微,设
记其特征值为,那么:
(1)当且仅当所有特征值满足,原点是指数稳定的;(此时称A为Hurwitz矩阵)
(2)当且仅当所有特征值满足,原点是不稳定的。
该定理并未涉及的情况,因为当存在某些
使得
时,线性化不能确定平衡点的稳定性。同时,定理1给出的结论是局部的,没有给出吸引域的相关信息,也不能判断全局稳定性,下面利用Lyapunov函数对上述结论进行扩展。
定理2:设是包含原点的一个区域,f(x)是定义在D上的局部Lipschitz函数,且f(0)=0。假设V(x)为D上的连续可微函数,且对所有域D成立
其中,a、k1、k2、k3为正常数,则原点是系统的指数稳定平衡点,如果上述条件对全局成立,则原点是全局指数稳定平衡点。
对于线性系统,可以采用二次型Lyapunov函数
,其中,P为实对称正定矩阵,应用定理2,V沿着
的轨线的导数为:
其中,Q定义为(Lyapunov方程)
如果Q是正定的,由于,应用定理2,可以推断出原点是全局指数稳定的,即A为Hurwitz矩阵(因为定理1的条件是充要的)。直接应用Lyapunov定理可以得出原点是渐进稳定的,而对于线性系统,渐进稳定和指数稳定是等价的,因此也能推断出同样的结论。下面的定理3给出了基于Lyapunov方程的解判断原点指数稳定性的方法。
定理3:当且仅当对于任意一个正定对称矩阵Q,存在一个正定对称矩阵P满足Lyapunov方程,则矩阵A是Hurwitz的。而且,如果A为Hurwitz矩阵,则正定解P是唯一的。
定理3的结论帮助我们采用线性化的方法研究非线性系统。考虑非线性系统,其中f(x)是连续可微的,且f(0)=0,则在原点的邻域内可以描述为:
其中,,且当
。
当A为Hurwitz矩阵时,取Q为正定矩阵,由定理3知,求解Lyapunov方程可得到唯一的正定矩阵P。用作为非线性系统的备选Lyapunov函数,则
由于当,给定任意正常数k<1,总能找到r>0,使得在域
内有
,因此在D内满足:
应用定理2可知原点为非线性系统的指数稳定平衡点。
3.吸引域
定义:设原点为系统的渐进稳定平衡点,
是包含原点的一个区域,f(x)为定义在D上的局部Lipschitz函数,则原点的吸引域是这样的一个集合:如果
在吸引域内,那么对于所有
,系统
的解存在,且随着时间趋于无穷,解收敛到原点。
通常仅仅确定系统又渐进稳定的平衡点是不够的,还要确定系统在多大的区域是渐进稳定的,即确定该平衡点的吸引域,下面结合上述结论对利用Lyapunov方法估计吸引域。
根据Lyapunov方法,我们或许会认为:只要证明了在区域D内满足了公式(1)(3),那么平衡点的吸引域估计显然就是区域D。但这种推测并不正确:尽管始于D内的轨线从一个Lyapunov面移动到更内部的Lyapunov面,但却没有保证轨线永远在D内。一旦轨线离开D,就不能保证为负值,从而V(x)衰减到0的结论就难以成立。
如果能保证始于D内的轨线始终在D内就不会出现上述问题。取集合且使
。若初值在集合
内,那么由于
,会有
,即轨线始终在集合
内,此时
就是一个吸引域的估计。
对于二次型Lyapunov函数且
,只要选取:
就可以确保。

















 2406
2406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









