






 本文围绕STM32单片机与MPU6050芯片展开。介绍了MPU6050作为6轴或9轴传感器的原理,包括加速度、角速度及磁场检测。阐述芯片引脚连接、I2C通讯,规定芯片XYZ轴和旋转方向,还提及外部电路数据读取频率、自检等内容。
本文围绕STM32单片机与MPU6050芯片展开。介绍了MPU6050作为6轴或9轴传感器的原理,包括加速度、角速度及磁场检测。阐述芯片引脚连接、I2C通讯,规定芯片XYZ轴和旋转方向,还提及外部电路数据读取频率、自检等内容。
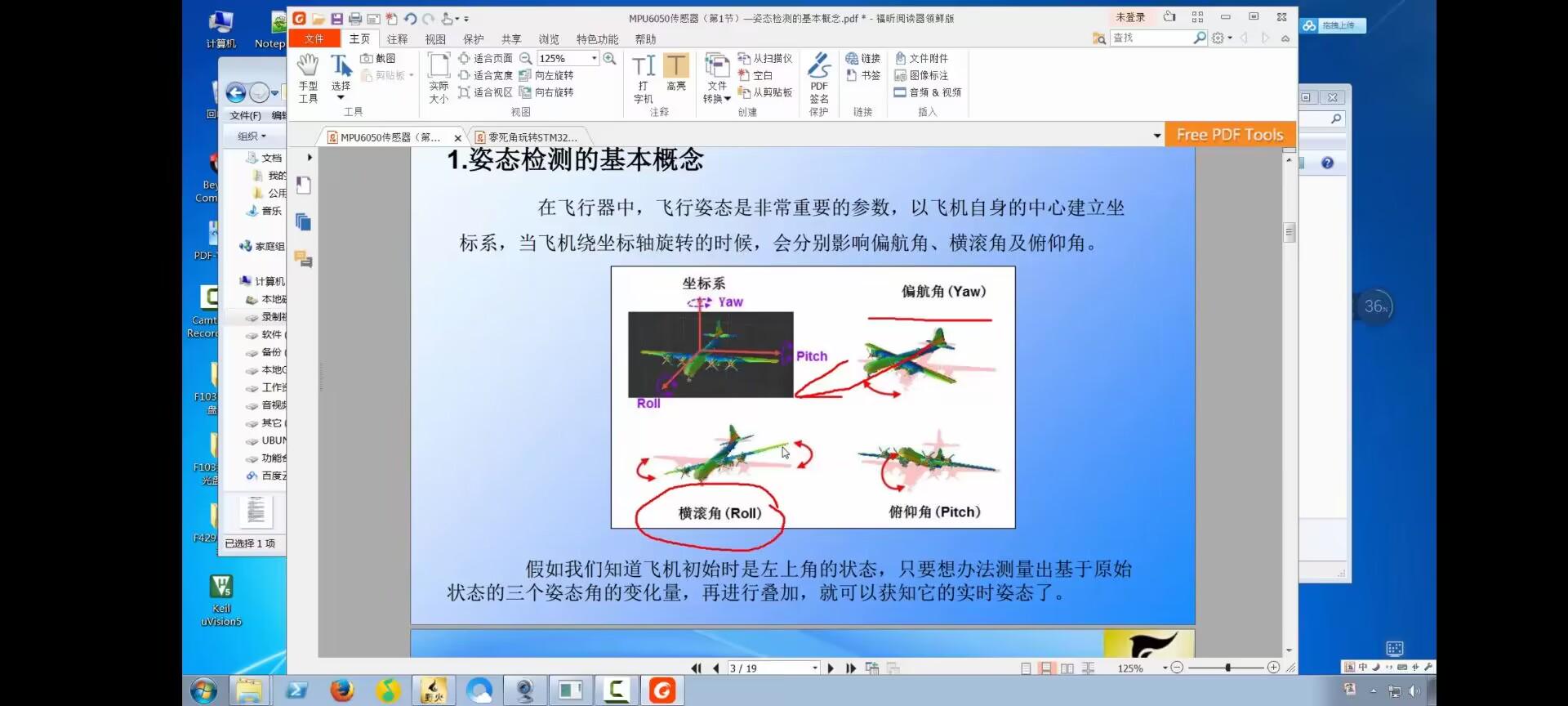
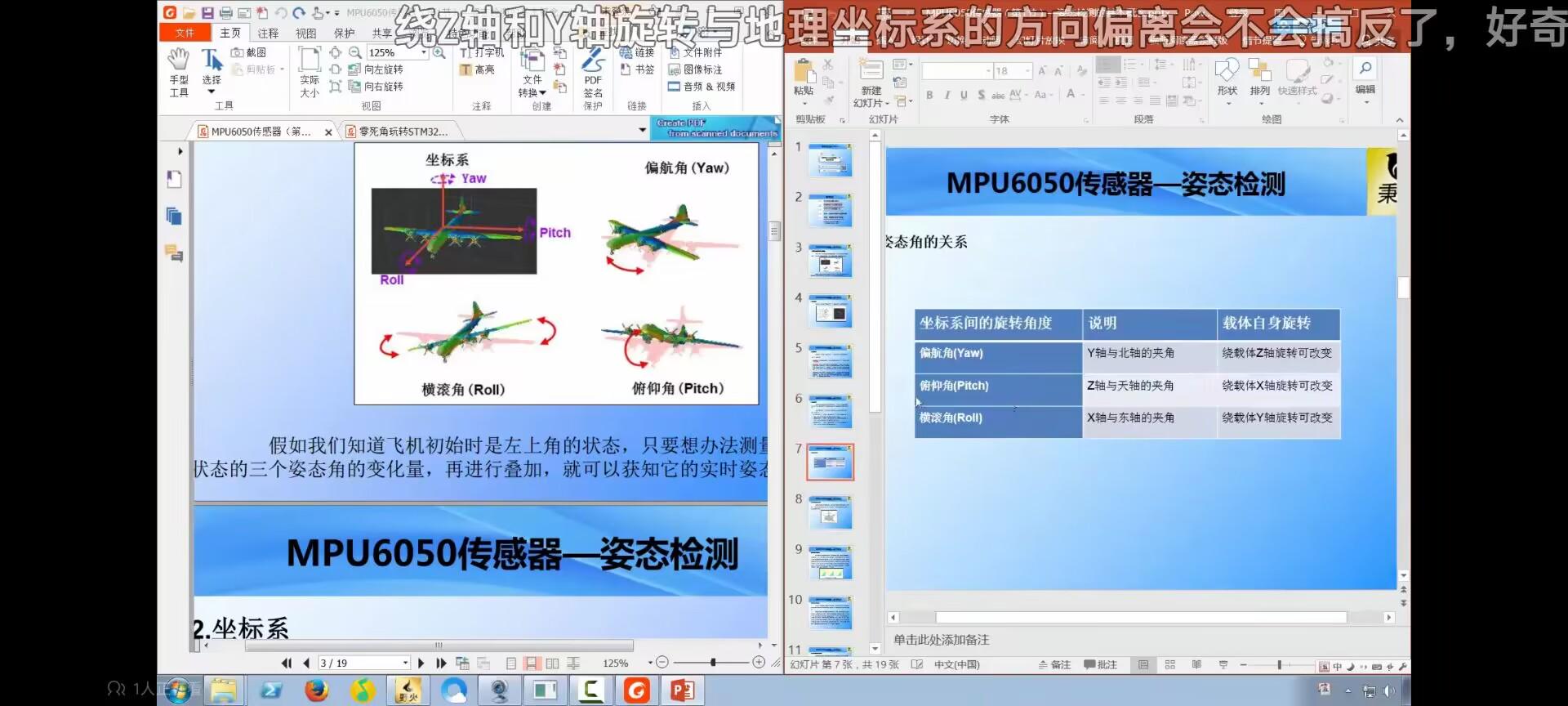
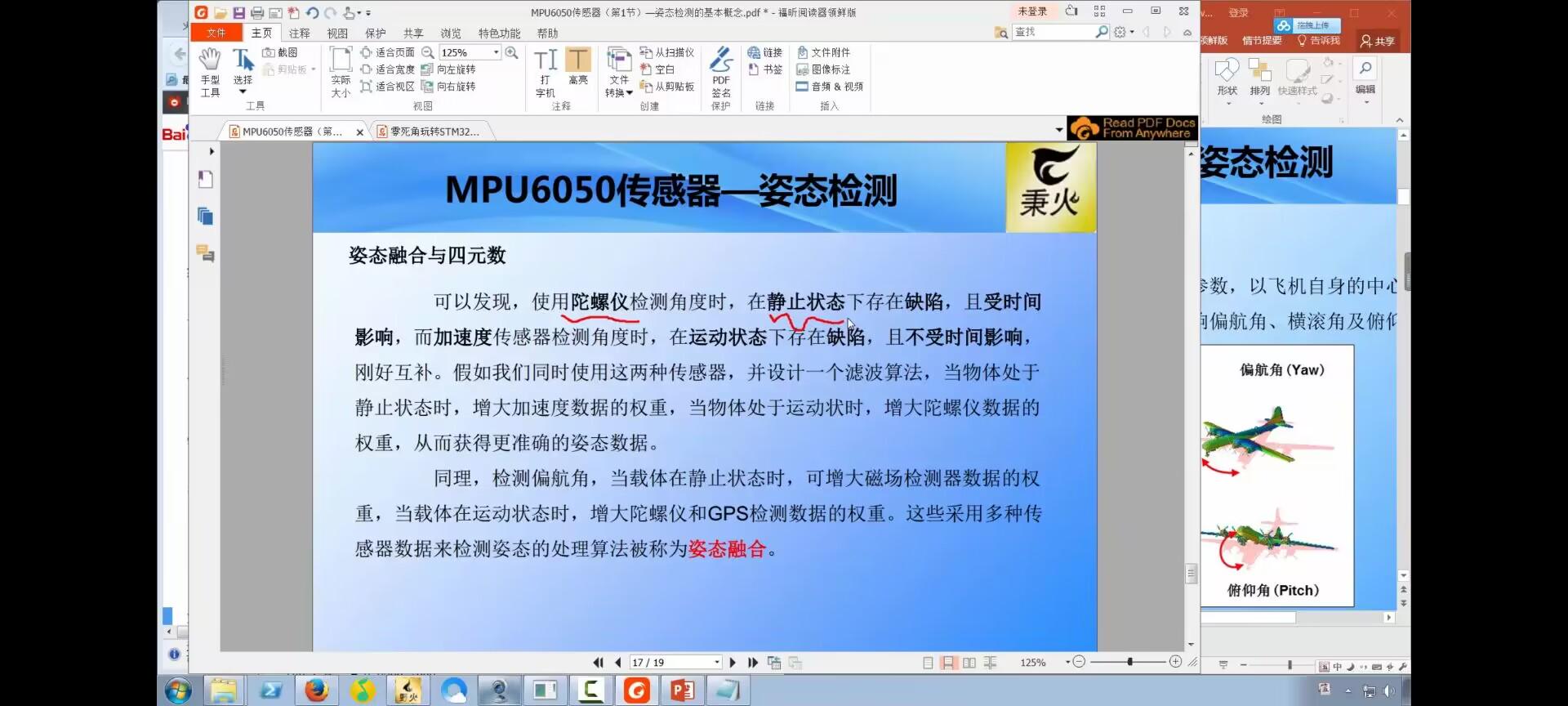
偏航角(Yaw)
横滚角(ROll)
俯仰角(Pit)
误差
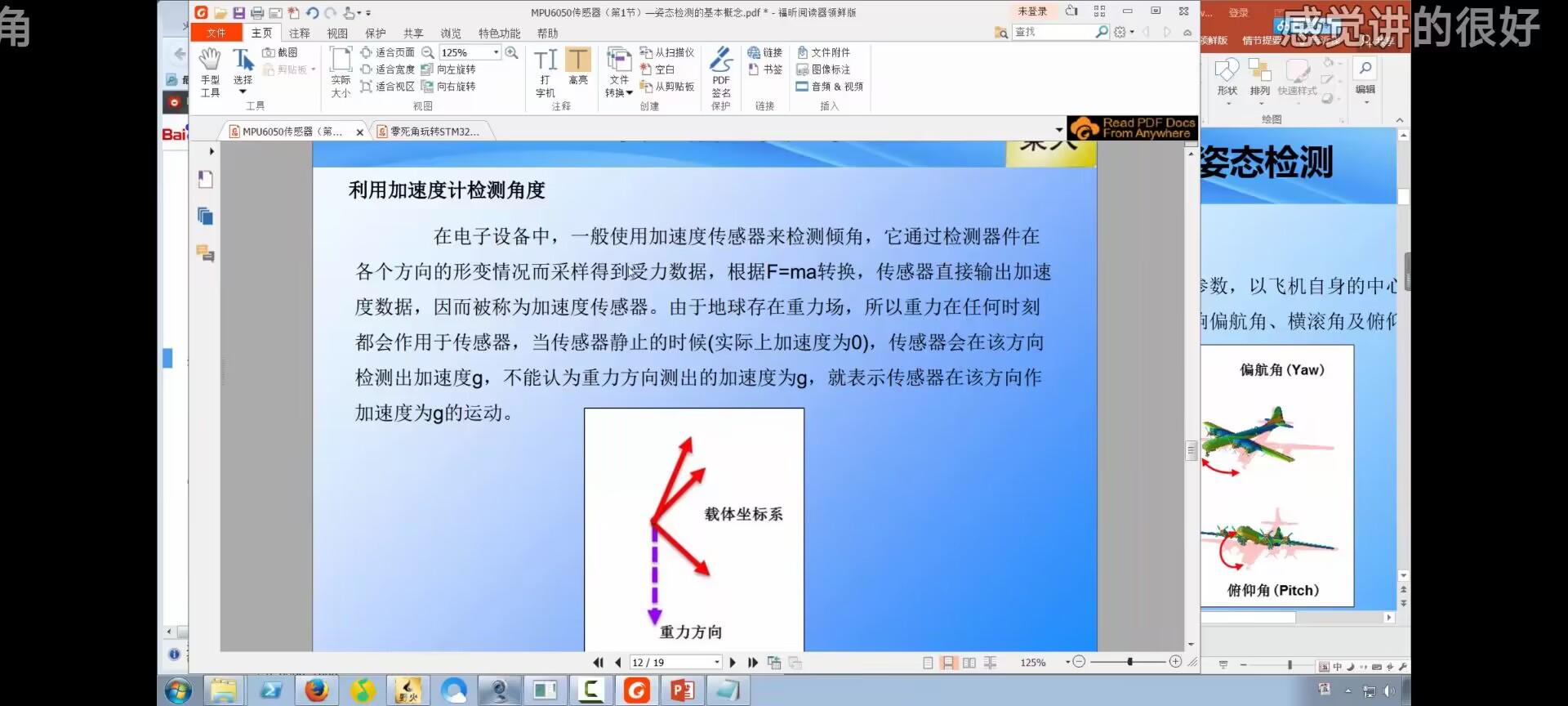
mpu6050里面有一个受力的东西
受重力影响的电容
某个导体就往下一点
根据f=ma就可以算出当前的加速度值
加速度传感器只输出加速度
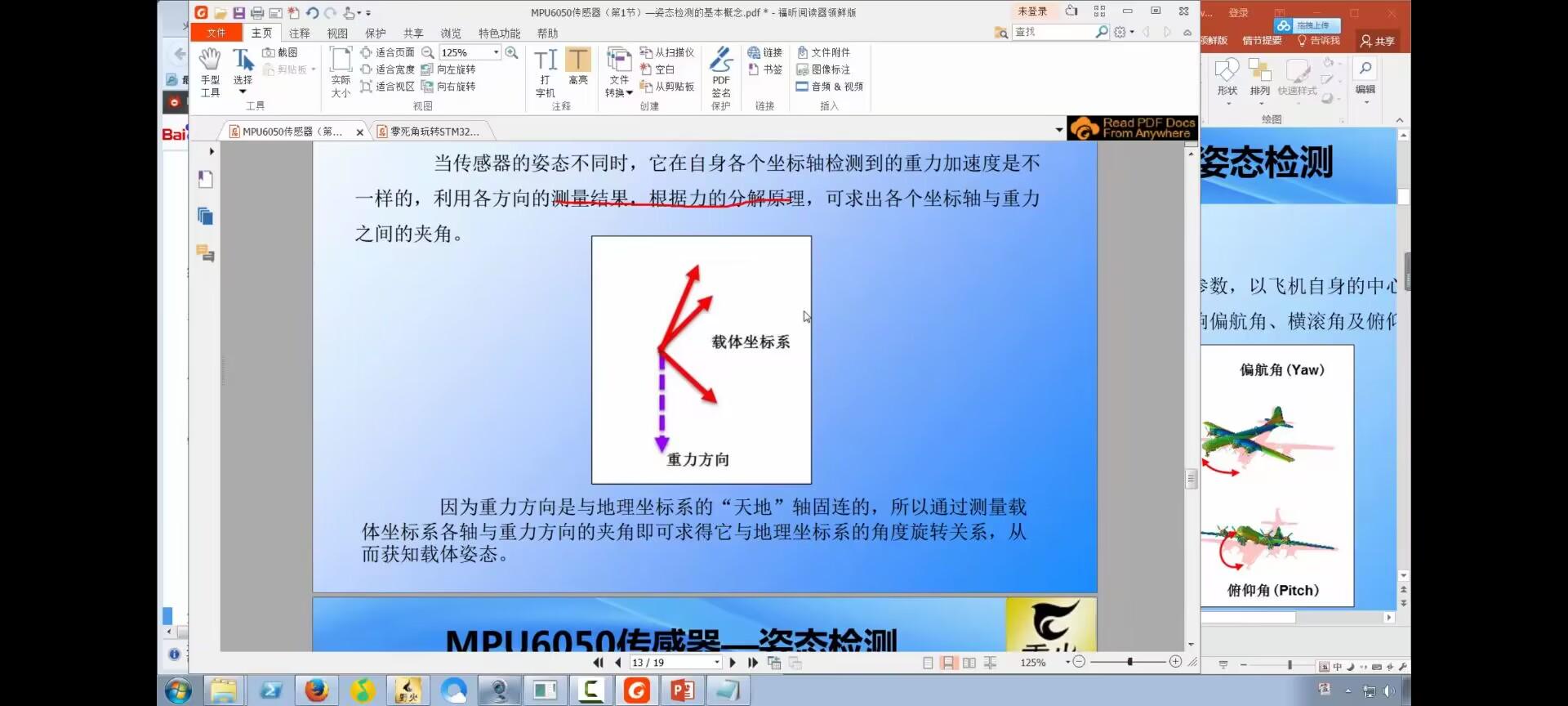
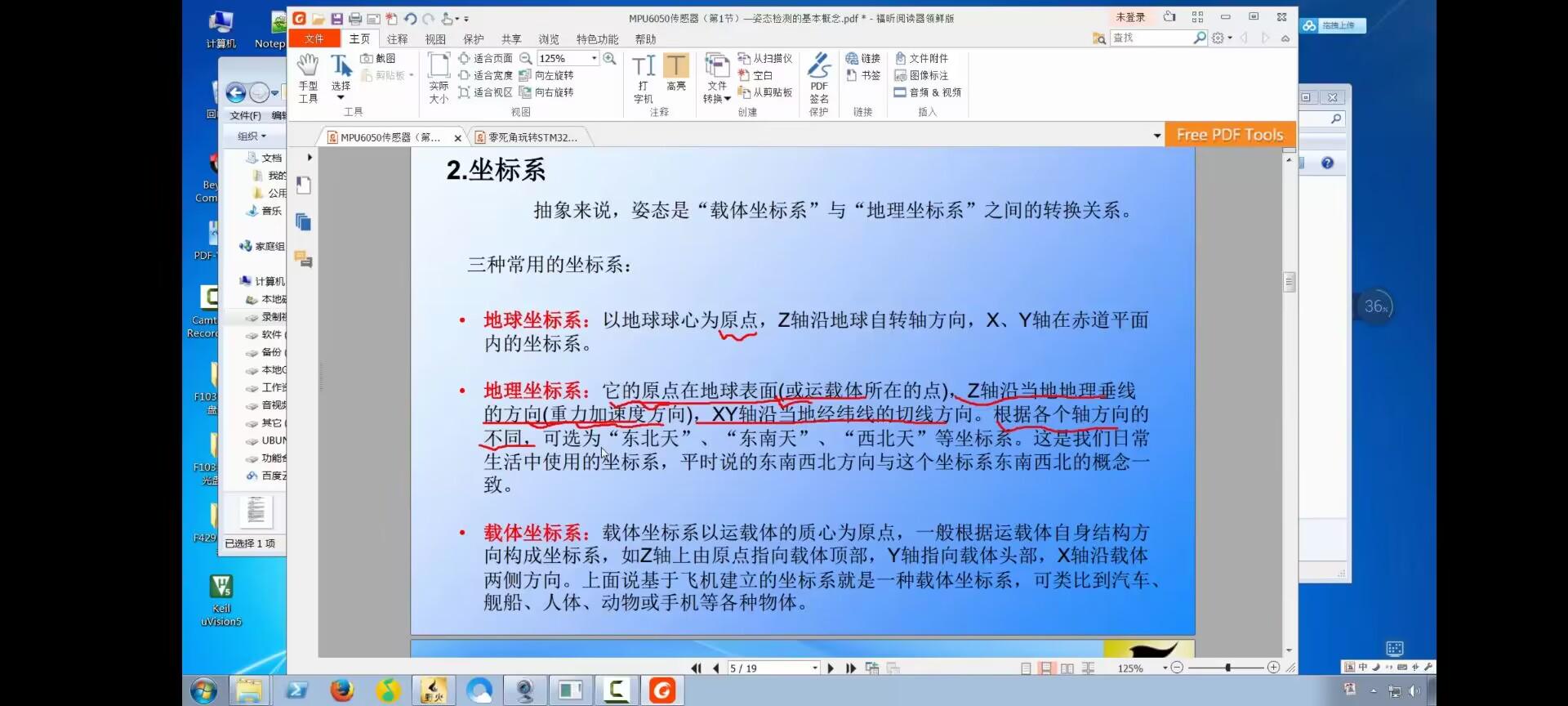
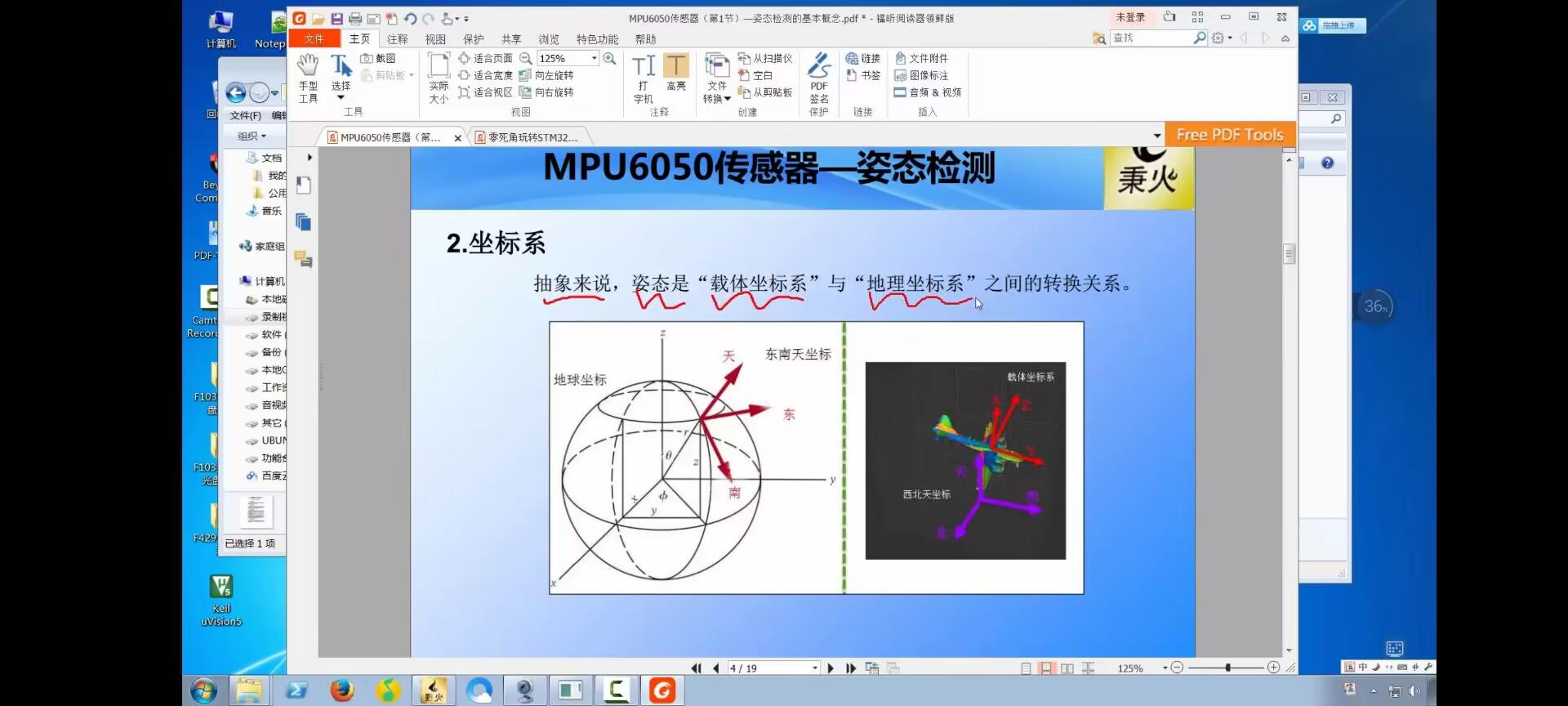
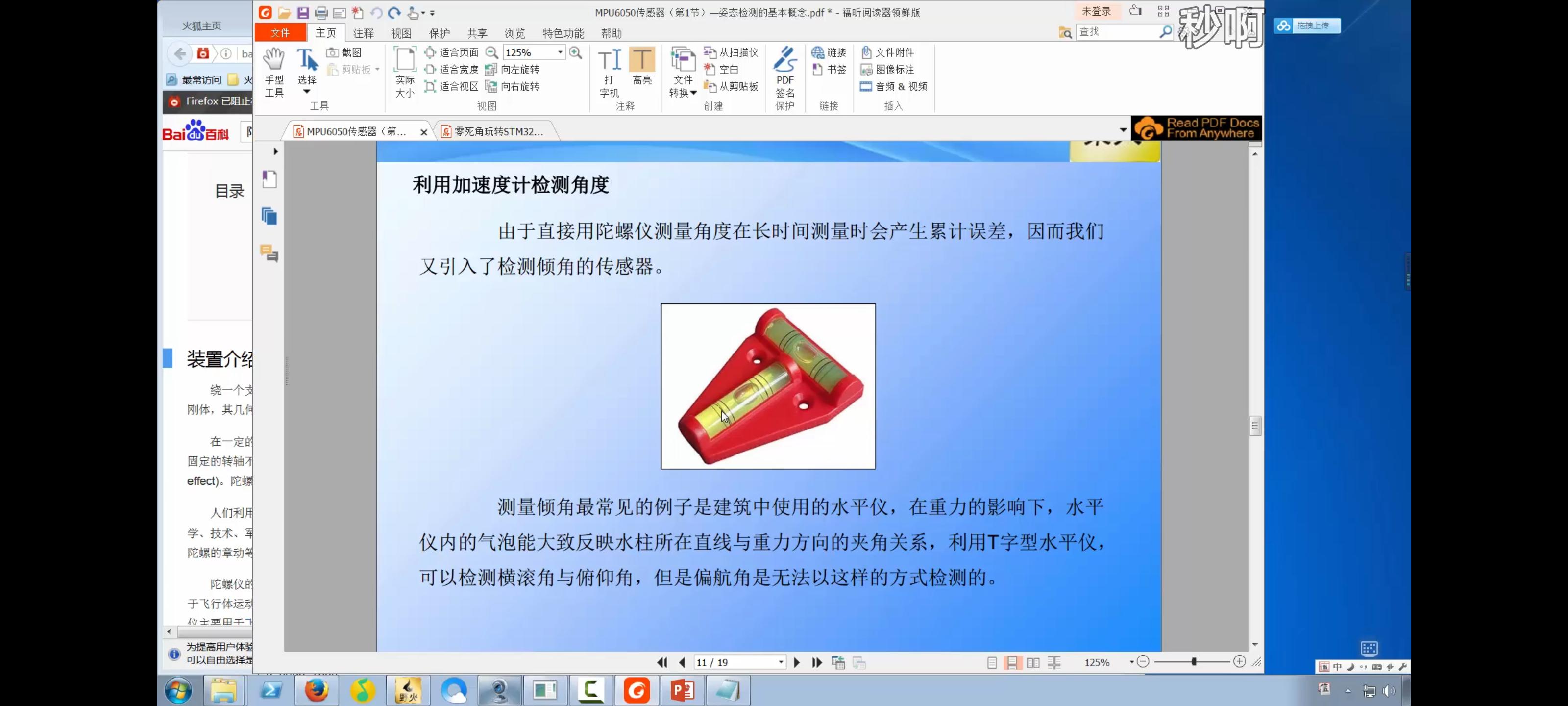
知道重力加速度和重力的角度可以求出各个坐标轴和力重力的夹角

mp6056角速度3个轴,加速度3个轴。就叫6轴传感器
9250还有磁场3个轴,就叫9轴传感器
GPS检测偏航角
要么是根据你的运动规矩,知道你往哪个方法跑,或者开车。要么是根据你手机的磁力计
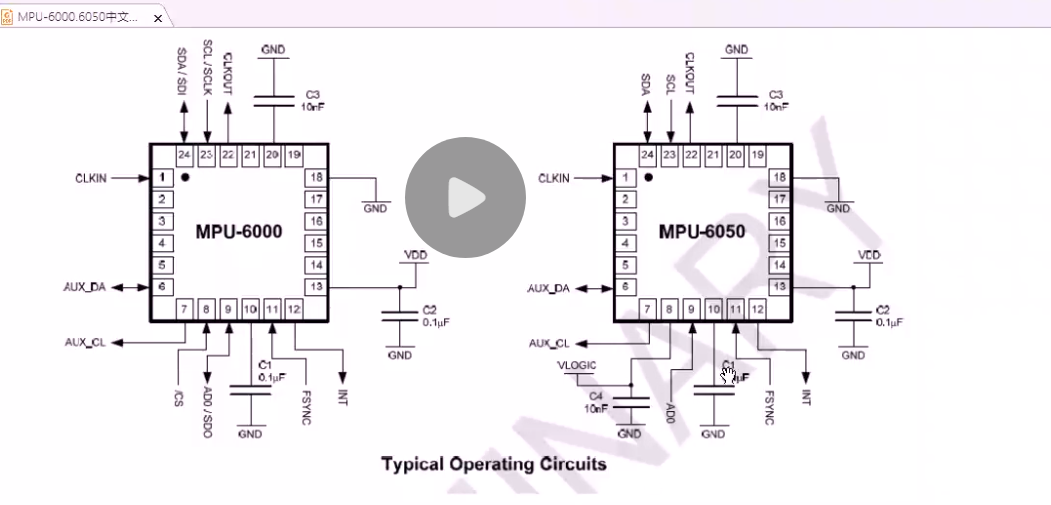
芯片
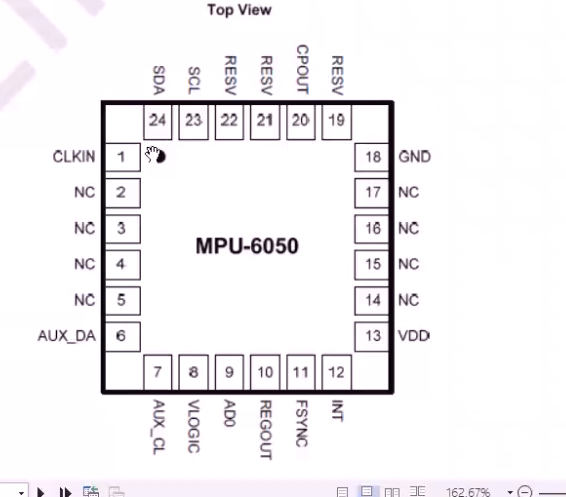
24脚,23脚没焊接成功。mpu6050(陀螺仪)死都通讯不出来。I2C通讯脚
转换完成提过12脚输出上升沿给32单片机,在32设置一个中断给来检测。检测引脚的上升沿进入中断
VDD与GND也必须接入引脚
1脚时钟输入。重机I2C,6,7外接一个测力计,输入6050统一计算,9决定从机的地址
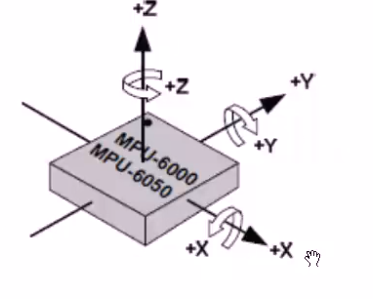
规定自己芯片的XYZ轴和旋转方向
方法左手定则
旋转方向巧记右手螺旋定则,四指的方向是正旋转方向
角度范围
Pit取值范围正负九十度,Wl正负180
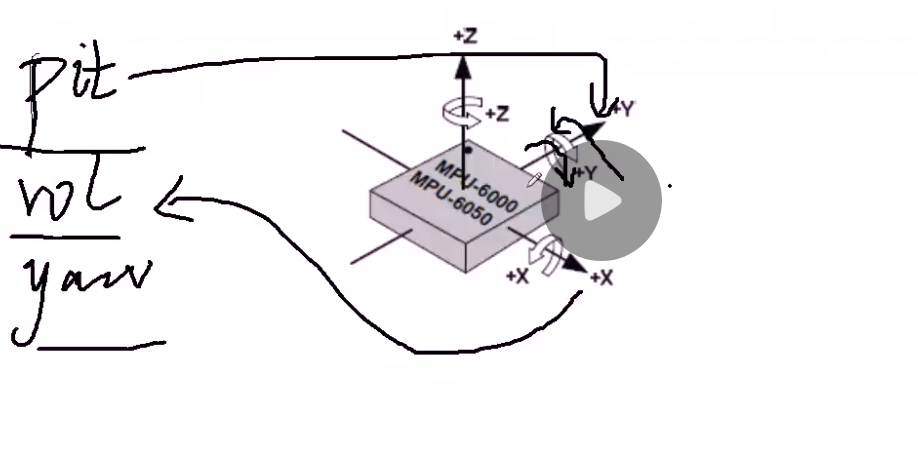
反方向转,pit增加
pitch是俯仰角,是“点头“ yaw是偏航角,是‘摇头’ roll是旋转角,是“翻滚”
偏航角(Yaw)
横滚角(ROll)
俯仰角(Pit)
外部电路
可以设置多少毫秒读取一次数据,频率调高不是好事
有的外设不用你开功耗就比较高,
有的是系统自动开的
自检必须搞,设置零度角
不一定必须搞
找mup6050中文文档
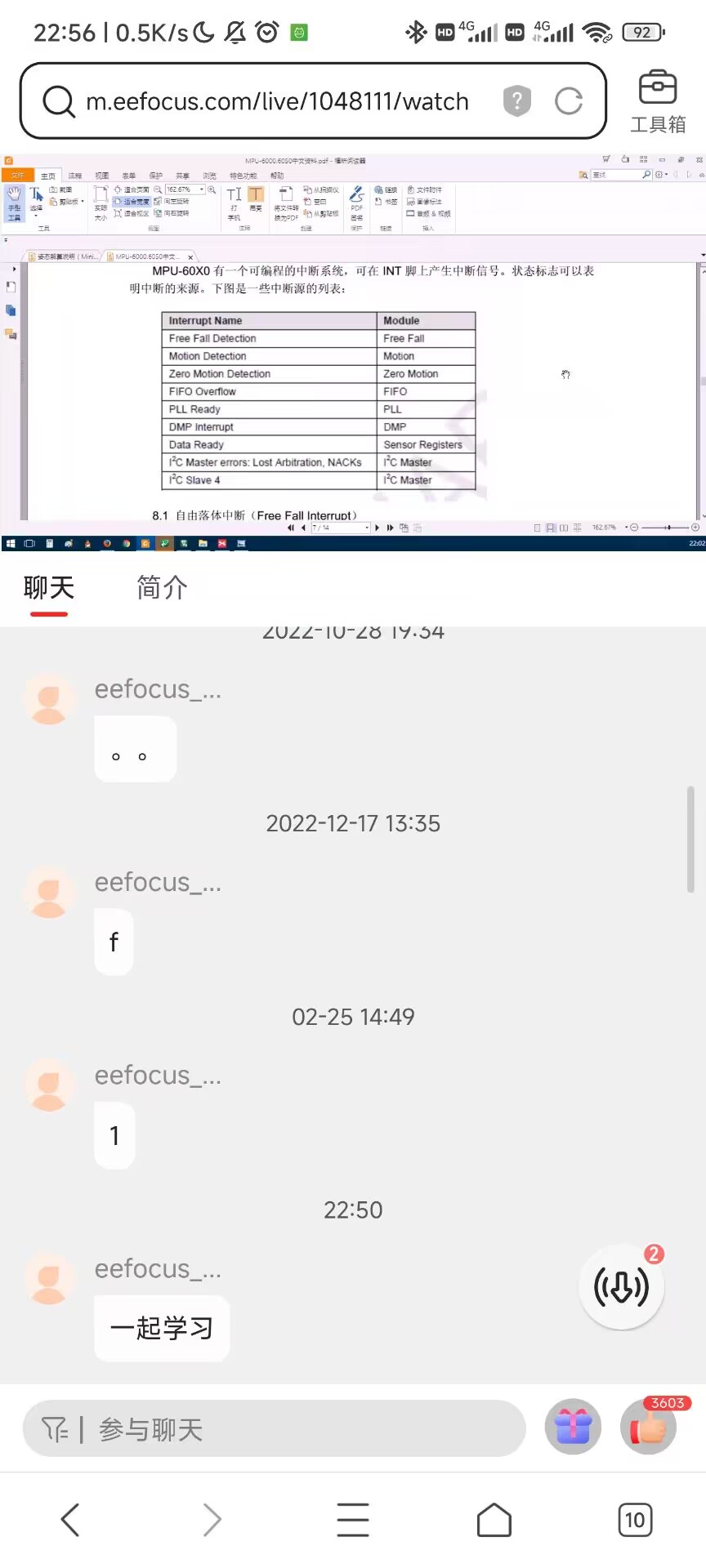
mup6050可编程中断
i2c链接mpu6050地址
x取决于AD0的值
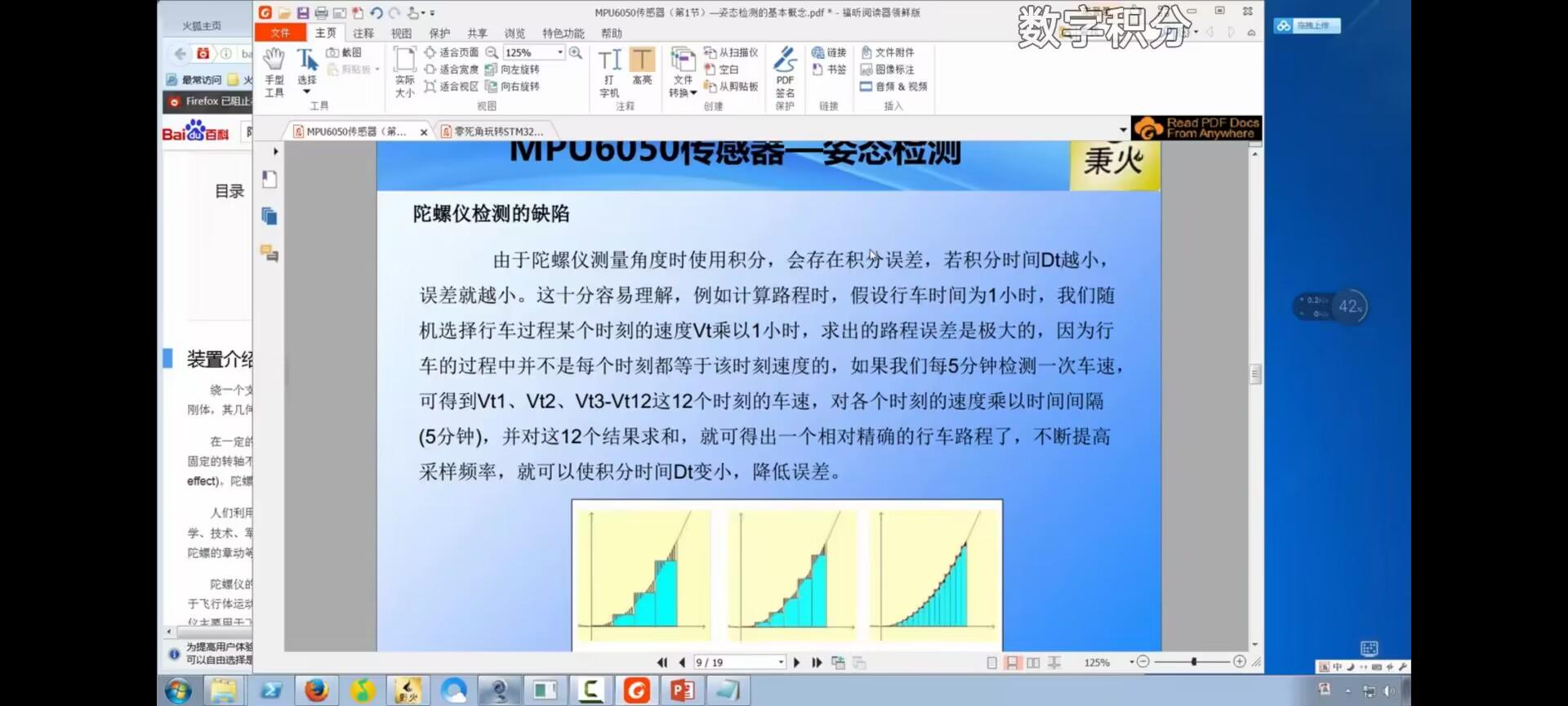
陀螺仪测角速度
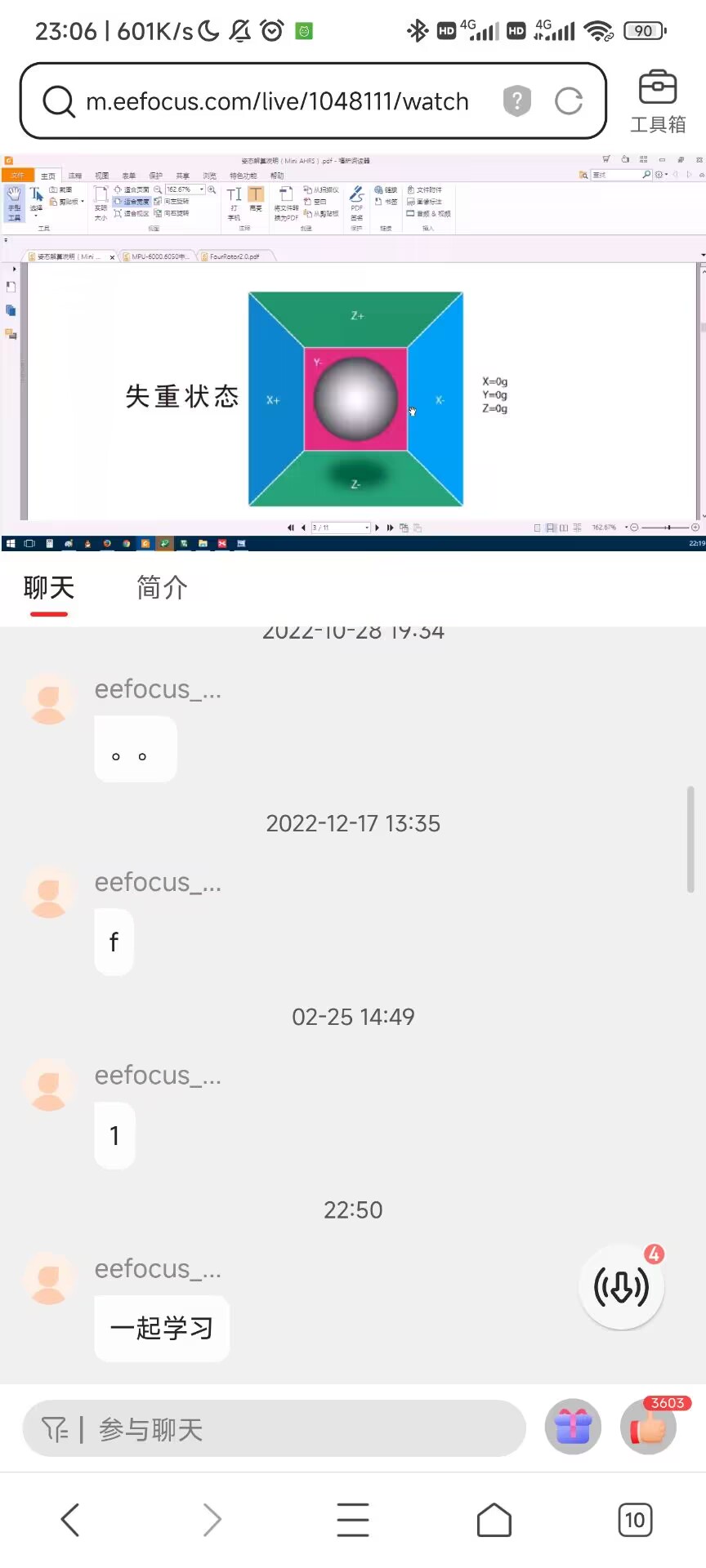
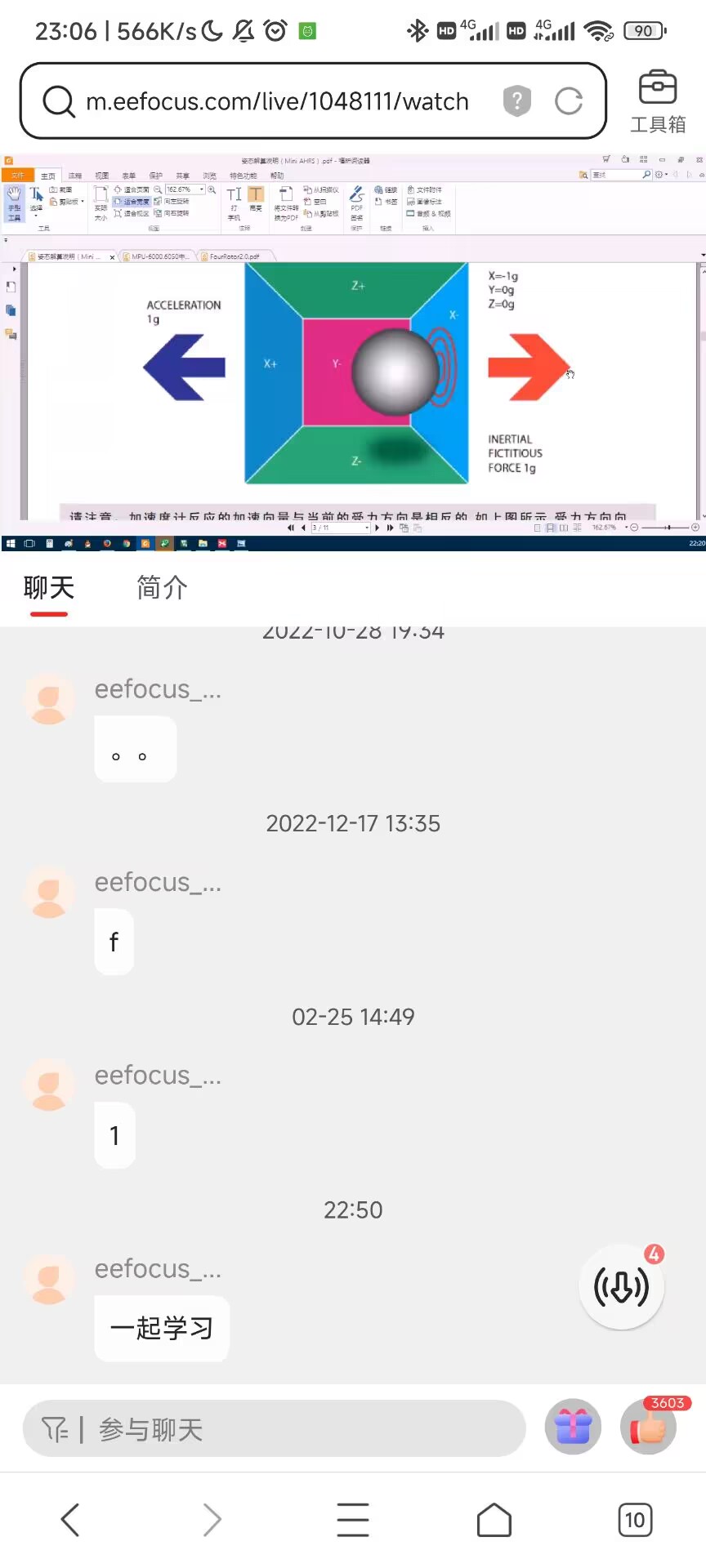
加速度计使用原理


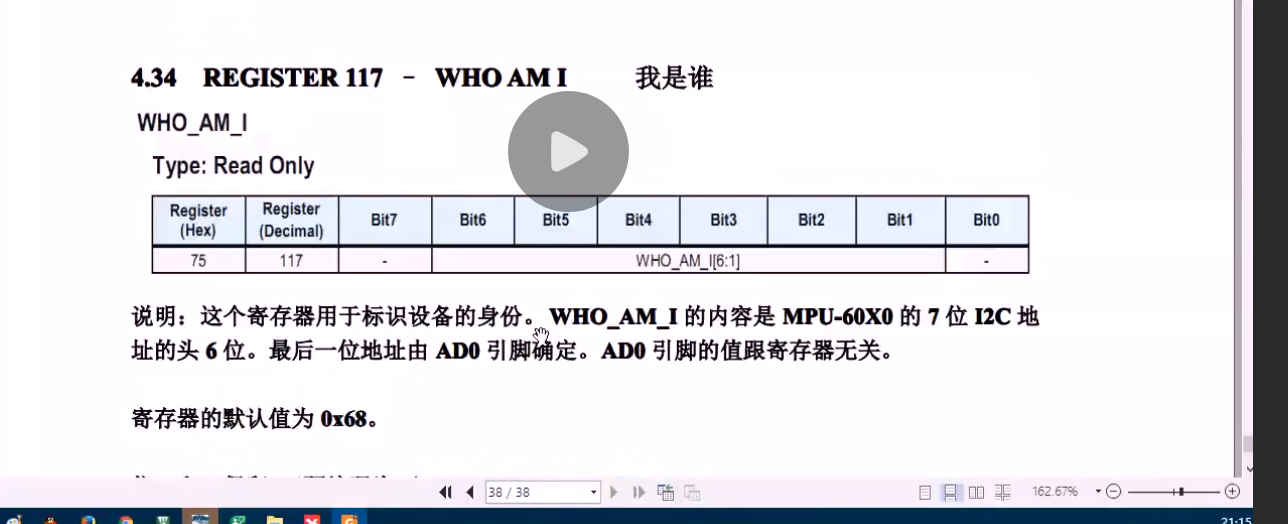
访问这个寄存器可以拿到数据证明I2C通讯正常


















 5907
5907

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











