







 超级会员免费看
超级会员免费看
 这篇博客介绍了如何在Ubuntu环境下通过Python控制ROS(Robot Operating System)中的海龟模拟器。首先创建功能包wugui_pub,接着编写代码,设置代码执行权限,最后分别在两个终端中启动ROS核心和运行控制海龟运动的Python脚本。
这篇博客介绍了如何在Ubuntu环境下通过Python控制ROS(Robot Operating System)中的海龟模拟器。首先创建功能包wugui_pub,接着编写代码,设置代码执行权限,最后分别在两个终端中启动ROS核心和运行控制海龟运动的Python脚本。
一、创建功能包
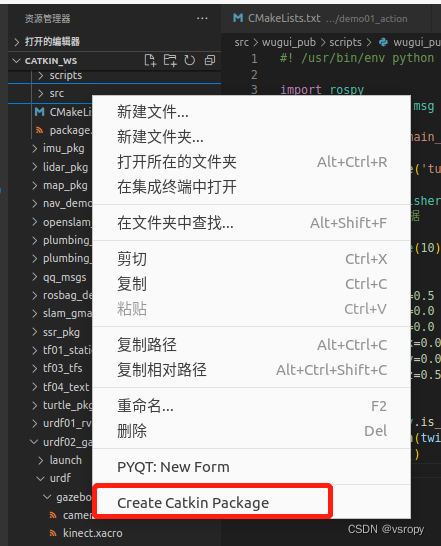
输入:
wugui_pub 回车
roscpp rospy geometry_msgs std_msgs
二、写代码
#! /usr/bin/env python
import rospy
from geometry_msgs.msg import Twist
if __name__ == '__main__':
#初始化节点
rospy.init_node('turtle_pub')
#创建发布者对象
pub=rospy.Publisher('/turtle1/cmd_vel',Twist,queue_size=10)
#组织数据并发布数据
#设置发布频率
rate=rospy.Rate(10)
#创建速度消息
twist=Twist()
twist.linear.x=0.5
twist.linear.y=0.0
twist.linear.z=0.0
twist.angular.x=0.0
twist.angular.y=0.0
twist.angular.z=0.5
#循环发布
while not rospy.is_shutdown():
pub.publish(twist)
ra
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1994
1994

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











