






- 登录github项目:https://github.com/graspnet/anygrasp_sdk?tab=readme-ov-file
- 创建conda环境
-
conda create --name anygrasp python=3.9 conda activate anygrasp - 下面准备安装依赖项目MinkowskiEngine:https://github.com/NVIDIA/MinkowskiEngine#anaconda
- 检查cuda版本,要求11.x。本人版本11.7。
-
nvcc -V - 进入pytorch官网下载torch(推荐开梯子官网下载):Previous PyTorch Versions | PyTorch
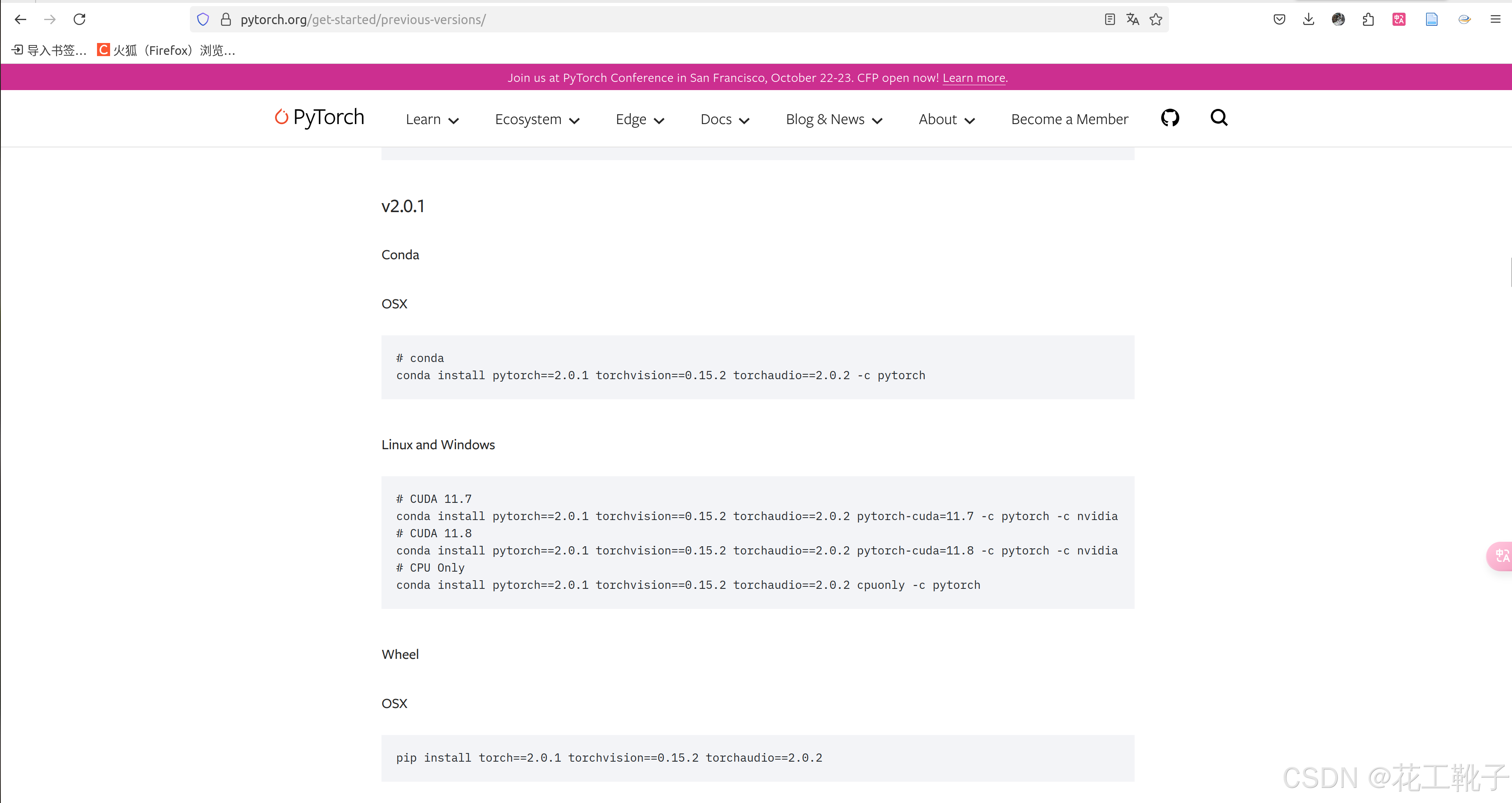
- 本人选择CUDA11.7,因此找到对应安装命令,conda环境下进行安装
-
conda install pytorch==2.0.1 torchvision==0.15.2 torchaudio==2.0.2 pytorch-cuda=11.7 -c pytorch -c nvidia - 检查是否安装成功
-
python >>> import torch >>> torch.cuda.is_available() True >>> quit() - 开始正式安装MinkowskiEngine
-
git clone https://github.com/NVIDIA/MinkowskiEngine.git cd MinkowskiEngine conda clean -all #清除conda缓存,防止重复下载torch pip install ninja #官方文档没说,这里依赖还需要安装ninja库 conda install openblas-devel -c anaconda #安装依赖 export CUDA_HOME=/usr/local/cuda-11.x #你的版本 export MAX_JOBS=2 cp /home/xxx(username)/anaconda3/envs/anygrasp/lib/libopenblas.so* /home/xxx(username)/anaconda3/envs/anygrasp/lib/python3.9/site-packages/torch/lib/. python setup.py install --blas_include_dirs=${CONDA_PREFIX}/include --blas=openblas - MinkowskiEngine安装成功,检查。
-
python >>> import MinkowskiEngine as ME >>> print(ME.__version__) 0.5.4 - 回到anygrasp项目,开始正式安装anygrasp
- 安装依赖
-
export SKLEARN_ALLOW_DEPRECATED_SKLEARN_PACKAGE_INSTALL=True pip install -r requirements.txt cd pointnet2 python setup.py install cd .. - 申请SDK的license和checkpoint,根据仓库readme提交表格申请。会收到三份文件。分别是,license文件(需要解压),两个checkpoint文件(用于进行任务)。

- 解压license后将文件夹复制两份,重命名为license,分别放在 grasp_detection 和 grasp_tracking 下。
- 演示grasp_detection。
- 进入grasp_detection文件夹。
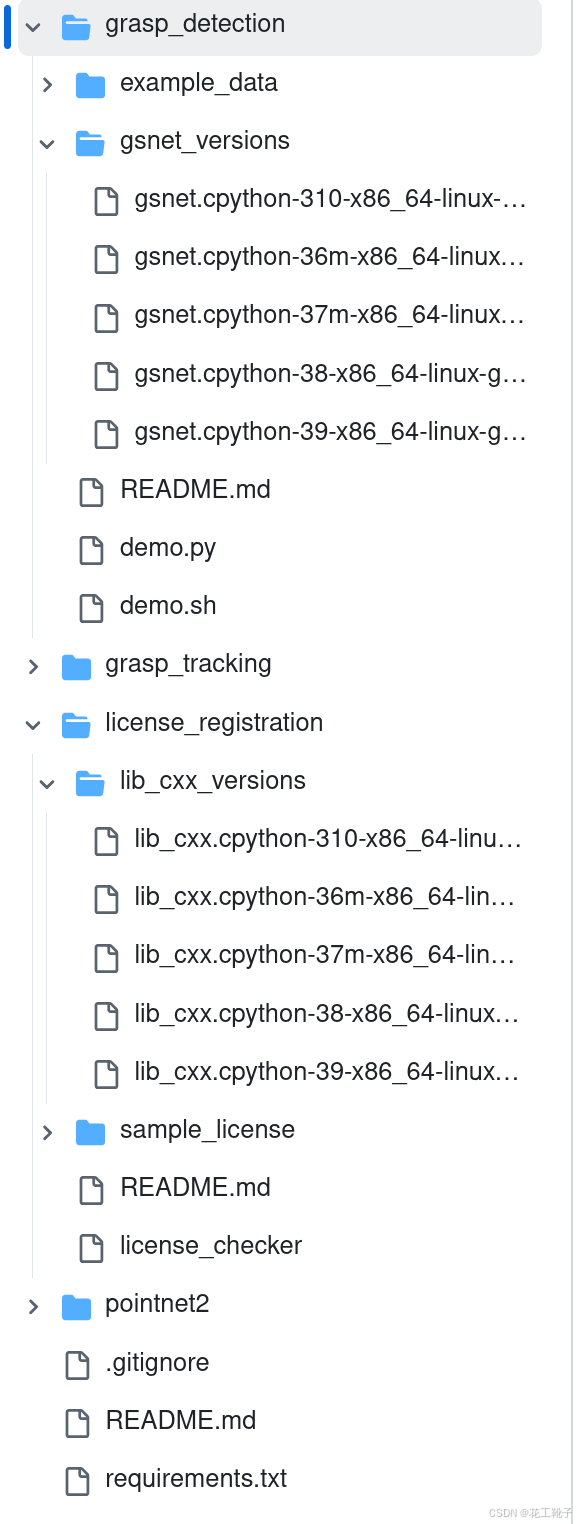
- 根据您的 Python 版本(支持 Python>=3.6,<=3.9),将
gsnet.*.so和lib_cxx.*.so复制到此文件夹。例如,如果您使用 Python 3.6,则可以执行以下操作: -
cp gsnet_versions/gsnet.cpython-36m-x86_64-linux-gnu.so gsnet.so cp ../license_registration/lib_cxx_versions/lib_cxx.cpython-36m-x86_64-linux-gnu.so lib_cxx.so - 其他python版本见目录。
- 在grasp_detection文件夹下创建log文件夹,将模型权重checkpoint_detection.tar放在log/下。
- 运行:
-
sh demo.sh -
成功输出
-

-
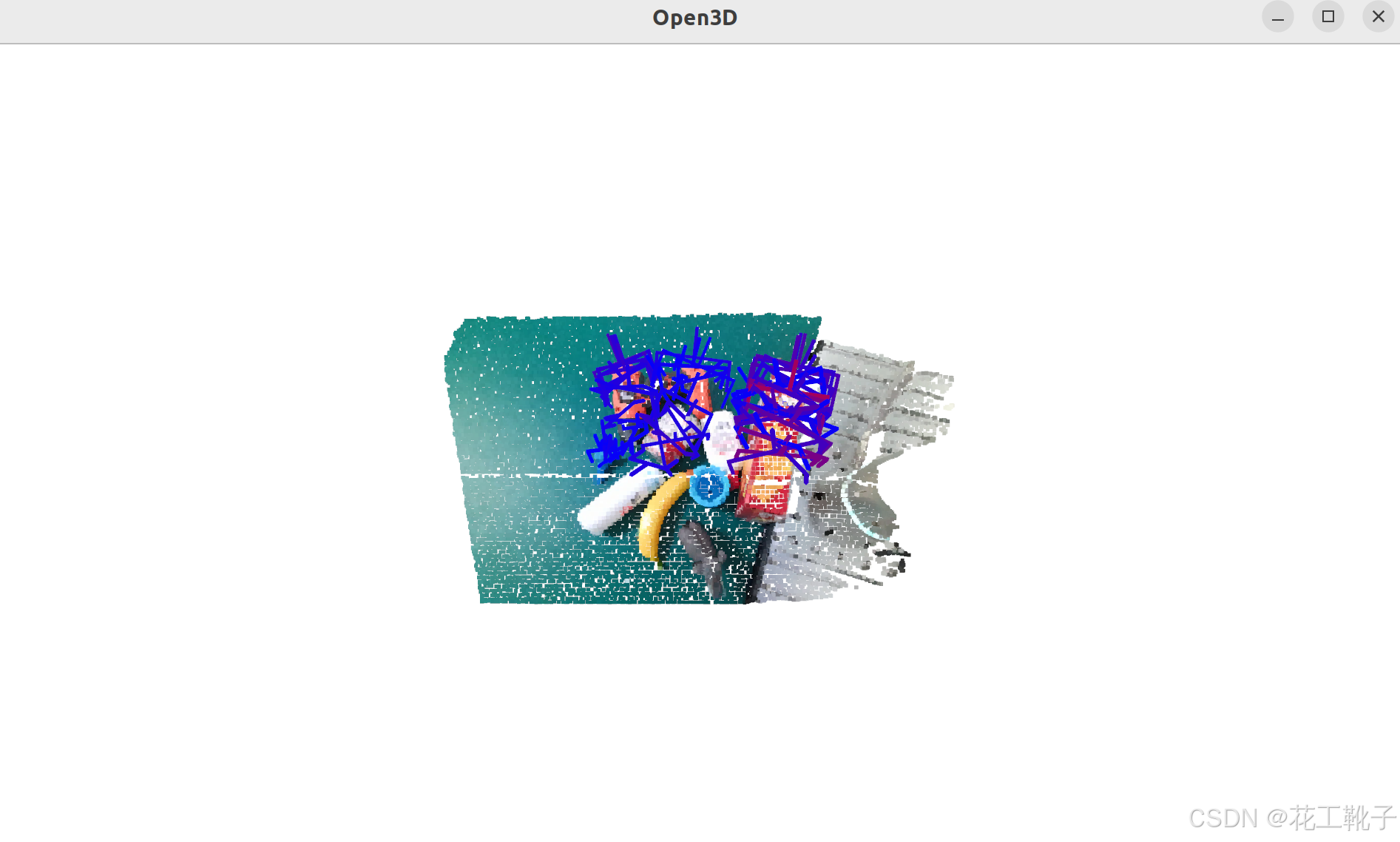
可视化运行:
-
python demo.py --checkpoint_path ./log/checkpoint_detection.tar --debug -
爪子备选,可以拖动放大缩小进行观察。
-
-
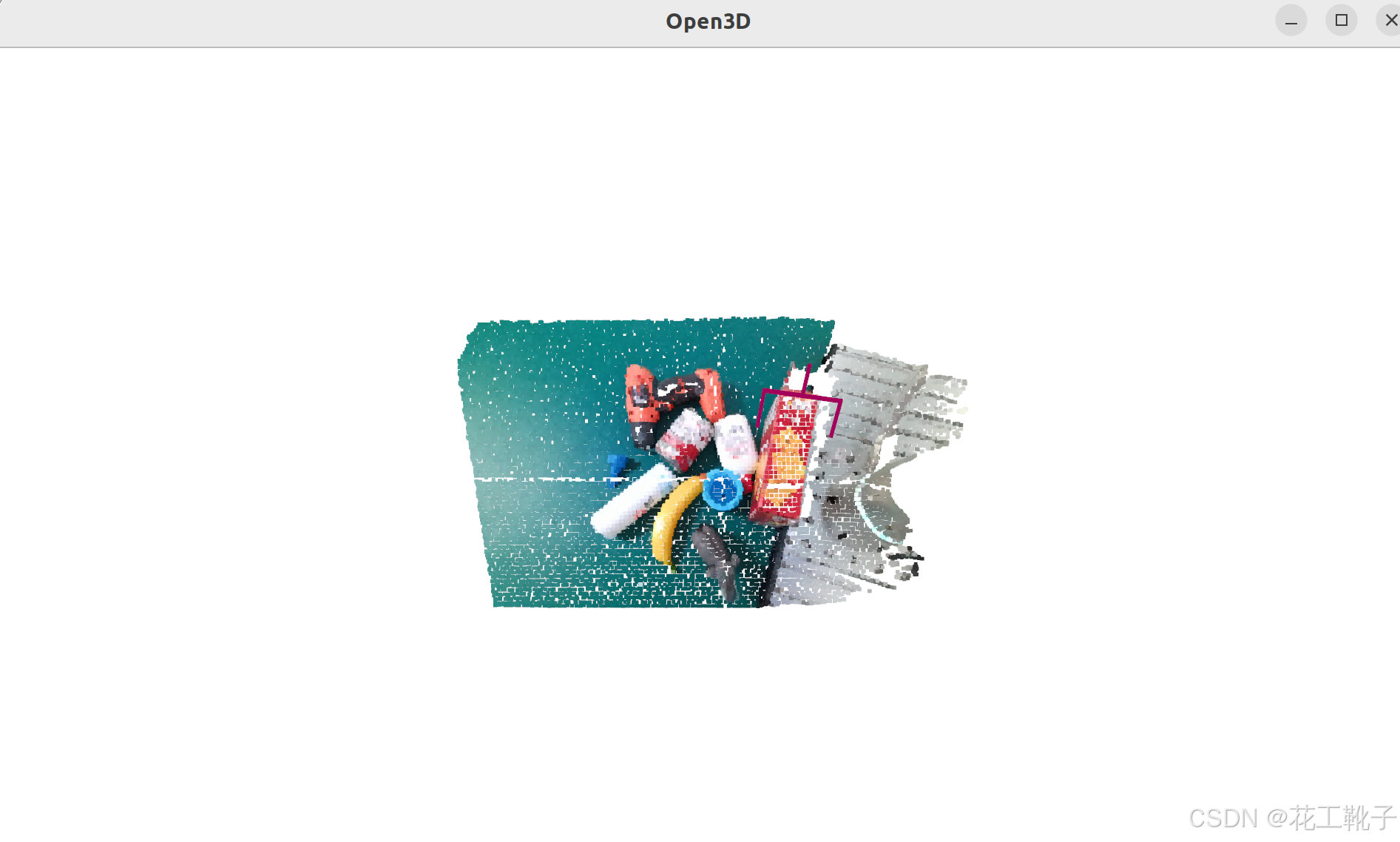
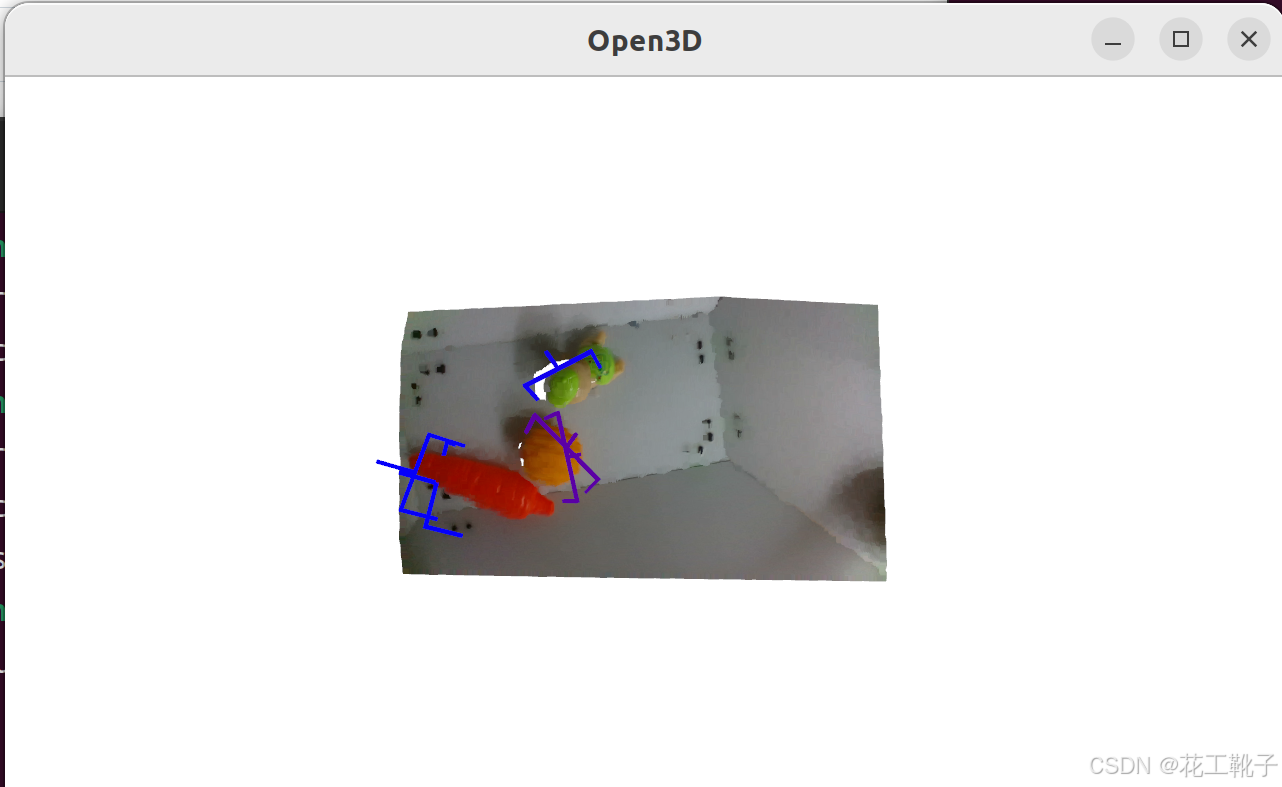
按下q,获得最终爪子标记。
-
-
结束。grasp_tracking同理。运行后动态展示跟踪。
-
-
如果你觉得有帮助的话,请给一个小小的赞!


















01-25
 2153
2153
2153
09-15
684
684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











