







 本文档详细介绍了镭神智能C16激光雷达在Ubuntu/Linux环境下与Autoware1.14的配合使用,包括硬件连接、雷达驱动安装、雷达参数查看、点云数据录包,以及A-LOAM建图效果的调整和Autoware的适配步骤。
本文档详细介绍了镭神智能C16激光雷达在Ubuntu/Linux环境下与Autoware1.14的配合使用,包括硬件连接、雷达驱动安装、雷达参数查看、点云数据录包,以及A-LOAM建图效果的调整和Autoware的适配步骤。
一、将硬件连通,确定数据通讯成功
二、下载好传感器的驱动并编译完成
mkdir -p ~/lslidar_ws/src
cd ~/lslidar_ws/src
git clone https://github.com/tongsky723/lslidar_C16.git
cd ~/lslidar_ws
catkin_make
source devel/setup.bash
roslaunch lslidar_c16_decoder lslidar_c16.launch
三、开始查看雷达参数
3.1 rviz效果图

3.2 查看启动了哪些话题和节点
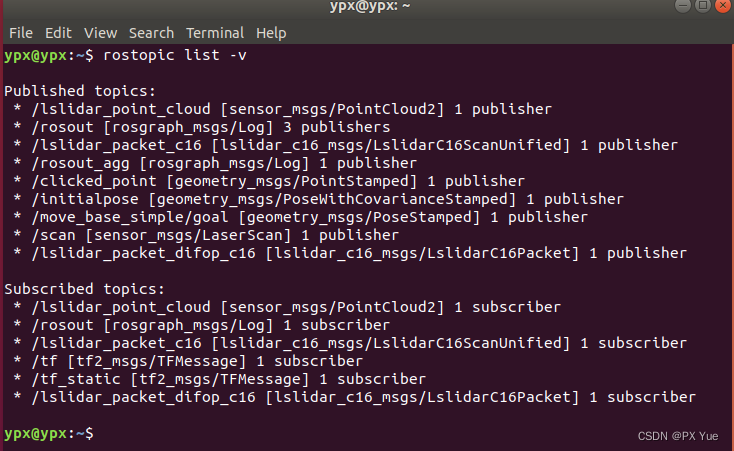
3.2.1 列出正在运行的话题,终端输入:
rostopic list -v
3.2.2 列出正在运行的节点,终端输入:
rosnode list

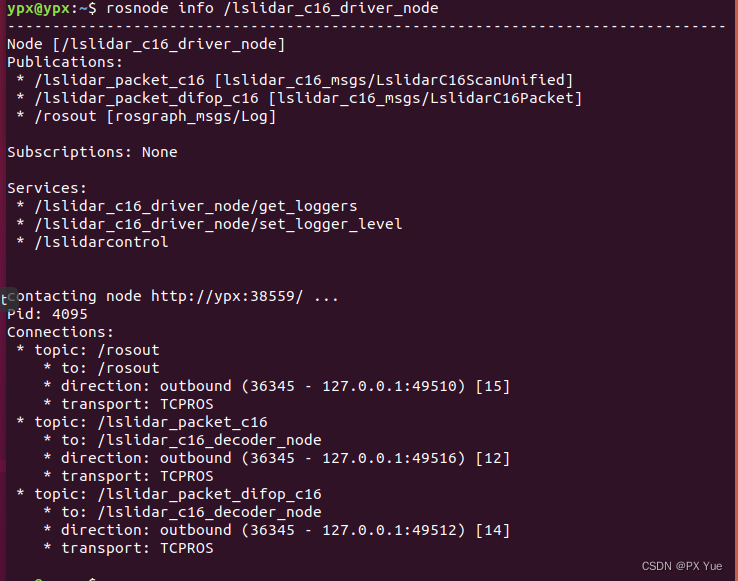
3.2.3 查看某一节点的具体参数和通讯话题,终端输入命令:
rosnode info 节点名
3.3 查看雷达的扫描频率
通过rviz可以看到,点云的话题名为 /lslidar_point_cloud,因此终端输入命令:
rostopic hz /lslidar_point_cloud
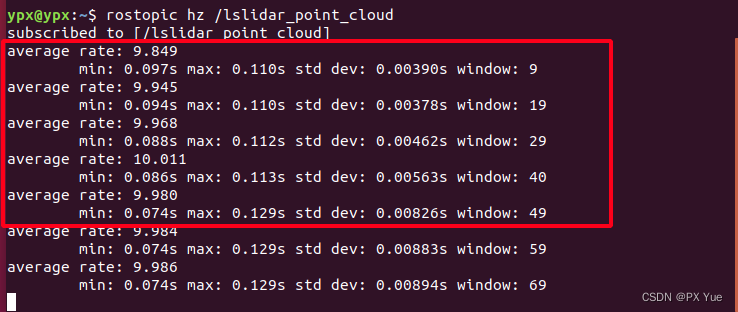
注:红框内为消息接发收时间参数,频率大概在10hz左右,与厂家说明书参数基本一致。
3.4 查看点云的具体参数
查看雷达扫描过程中,某一行的点云的坐标系名称、点云数等参数。
rostopic echo --noarr /lslidar_point_cloud #一定要加--noarr,排除话题数据中的数组信息,否则会出现乱码
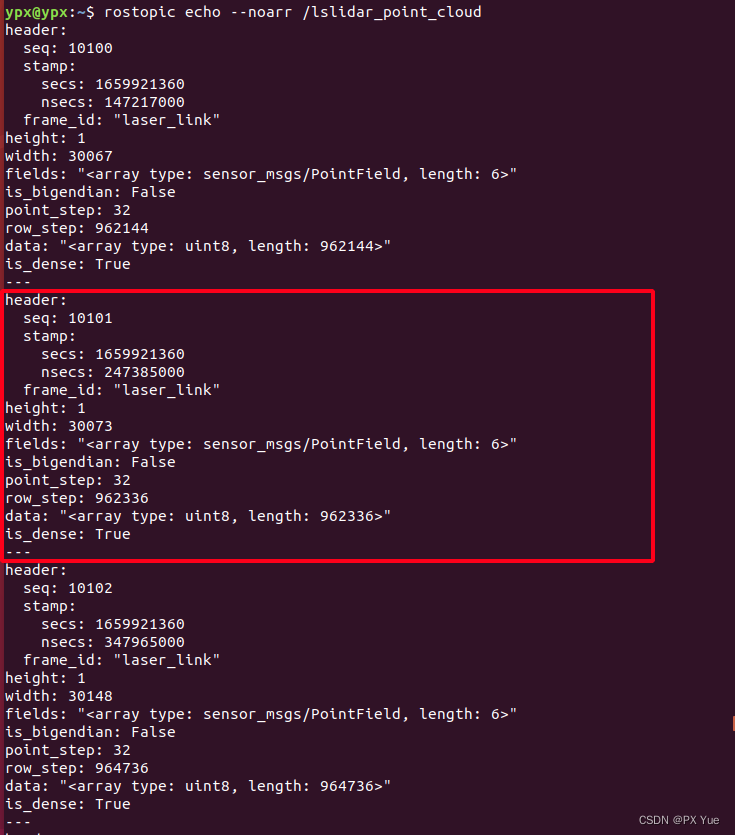
注&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5584
5584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









