







1原理分析
1.1倒立摆平衡原理
假设摆杆往前倾斜时,我们控制电机使摆杆作加速运动,加速度大小为 a。 受力分析如图 1所示,摆杆上会受到一个方向与加速度相反,大小与加速度成 比例的惯性力。比例系统为质量 m,即 F = -ma把这个水平向左的惯性力分解, 可以得到垂直于杆的力-ma cosq 。
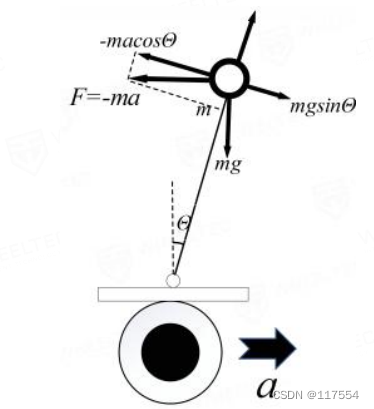
图 1倒立摆物理模型
可知摆杆受到的回复力为 F = mg sin q - ma cosq ,若θ很小,那么可以认为 sinq = q,cosq =1,且假设摆杆的反馈系统中加速度 a 于摆杆的倾角成比例关系, 比例系数为 k1,代入 a = k1q那么有 F =mgq - mk1 q 。当 k1>g 时,回复力 F 的方向就与倾斜方向相反了,此时摆杆会回复到平衡的位置。 若倒立摆以上述分析加入加速度 a,那么摆杆到达平衡角度后,因为惯性的原因,摆杆并不会立刻停下来,它会越过中立点,这将导致摆杆一直在中立点来回震荡。这时候我们需要引入一个阻尼力,阻尼力总是阻碍运动的,加上阻尼力 后摆杆的回复力变为: F = mgq - mk1 q - mk2 q’ = mgq - m(k1q + k2q’ ) 由此可得到加速度控制算法a = k1q + k2q’ 。只要保证 k1>g,k2>0,就可以令摆杆保持在平衡位置
其中直流减速电机的转速与电压(PWM)满足以下的曲线:
图 2不同电压下电机转速
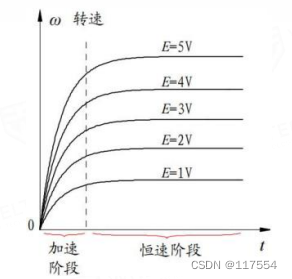
因此可以控制电机的PWM控制小车受到的加速度。
1.2麦克纳姆轮运动学分析
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









