







目录
【IIC协议概述】
【定义】
【特点】
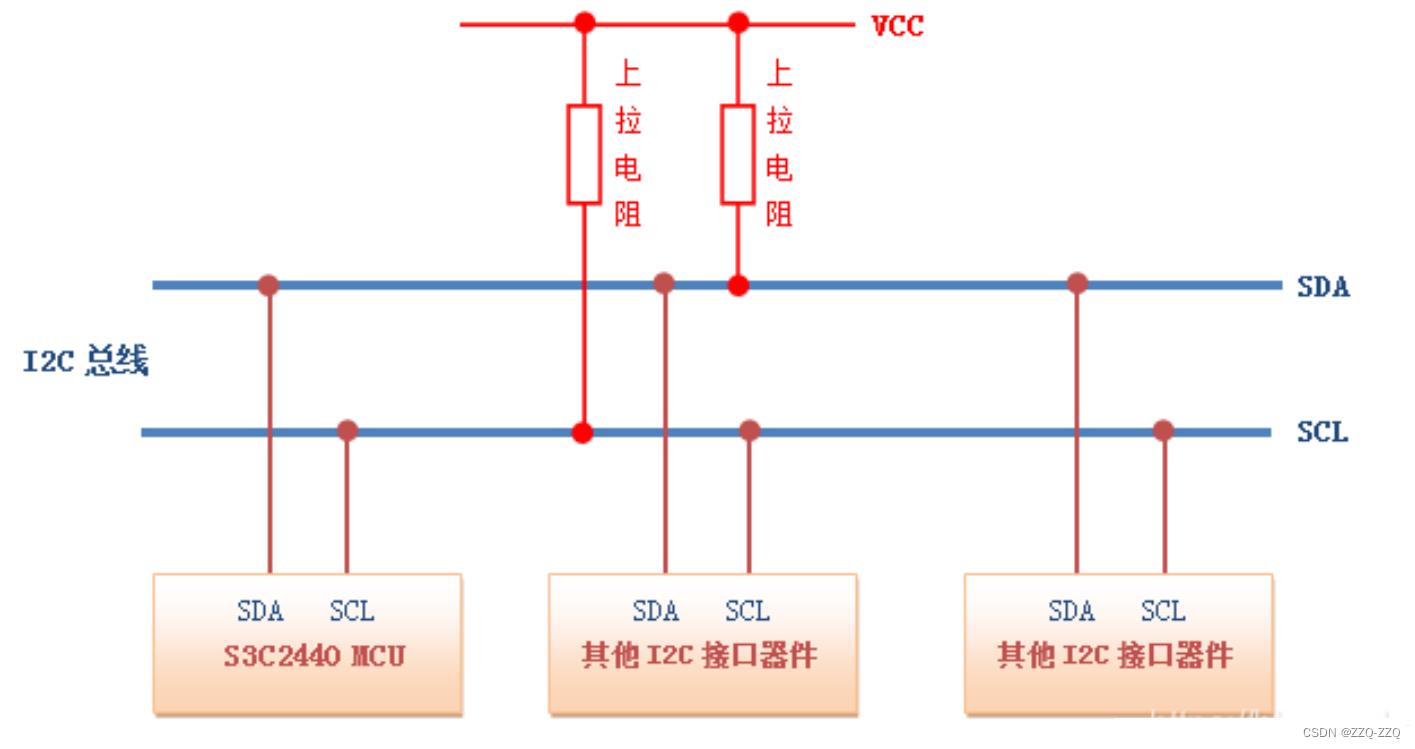
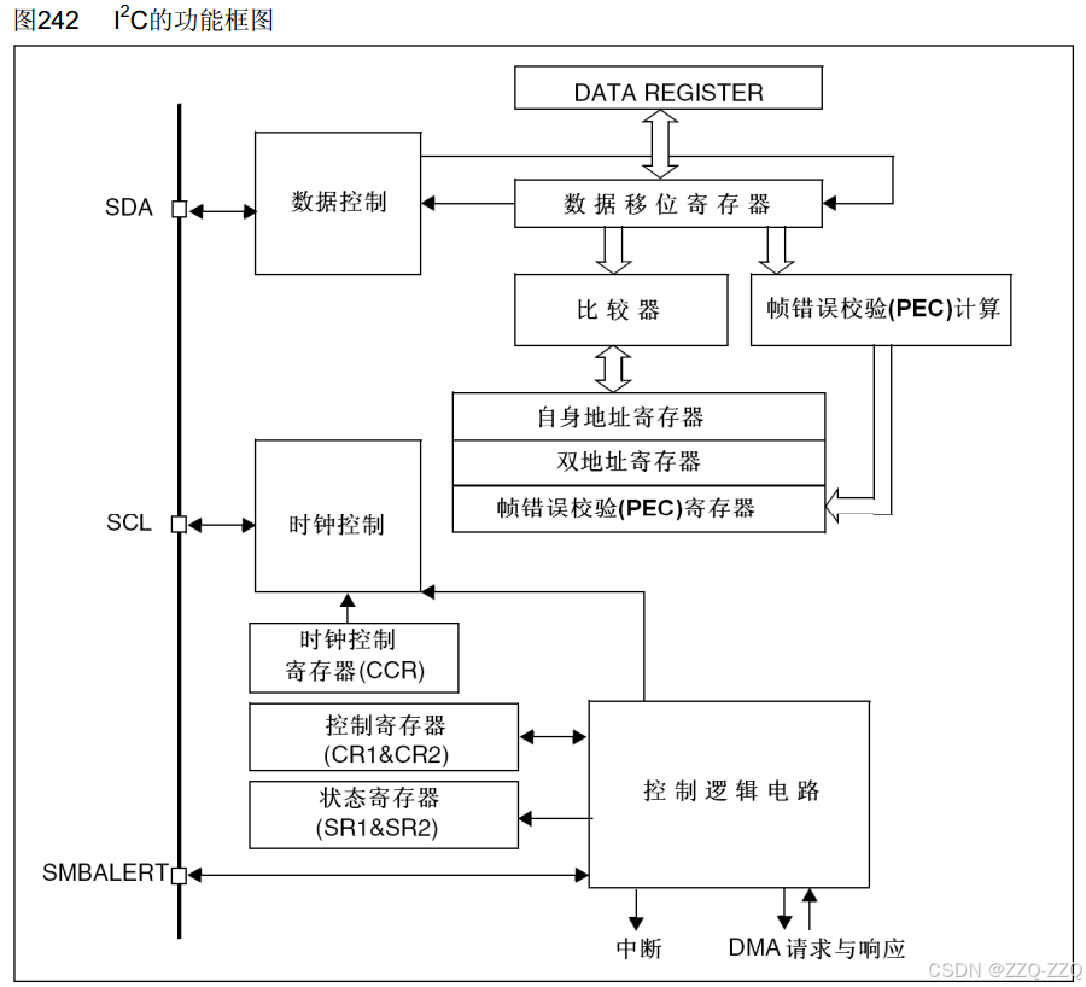
【框图】
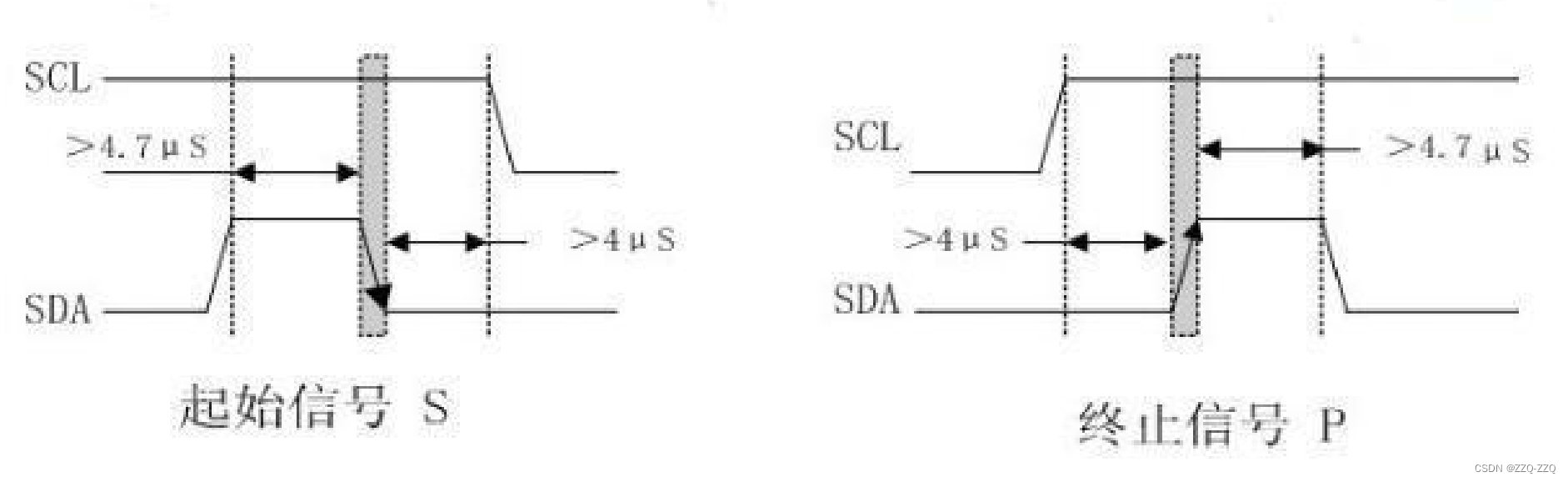
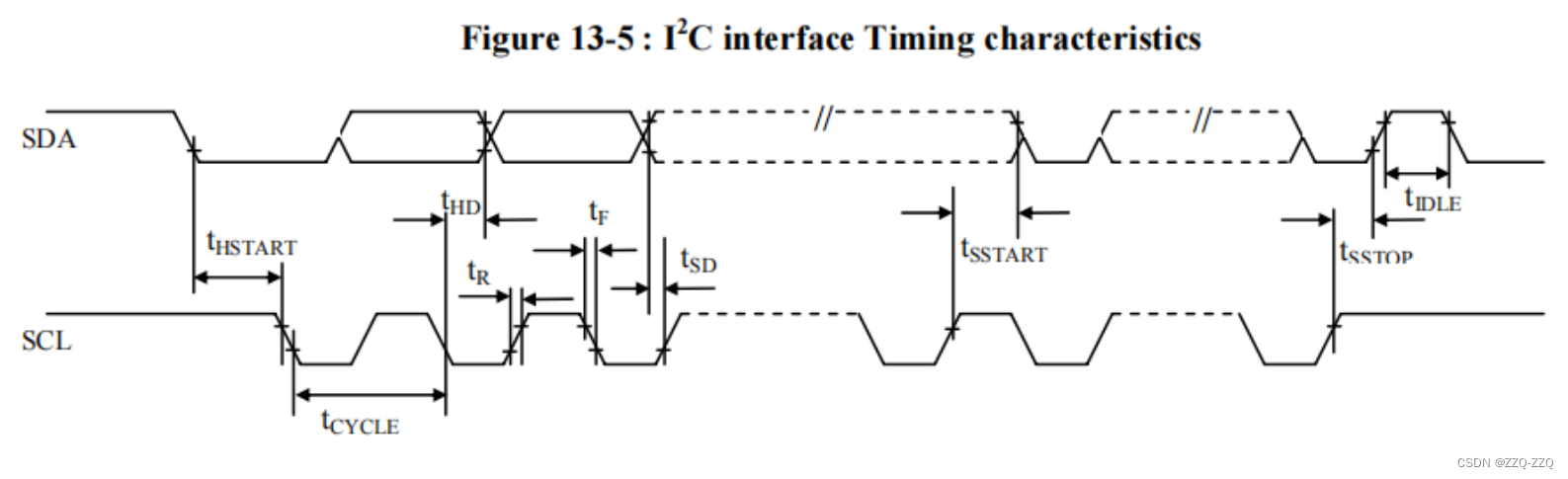
【时序】
● 数据发送的时序
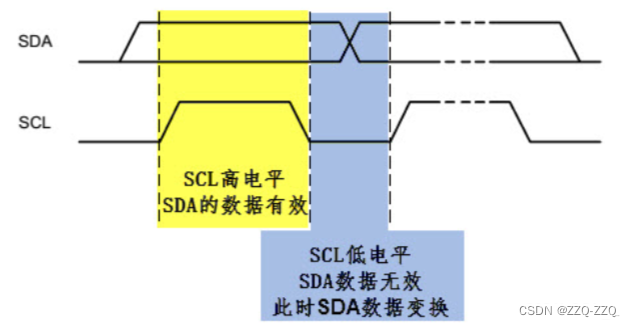
● 数据有效性
传输时,SCL 为高电平的时候SDA 表示的数据有效,即此时的SDA 为高电平时表示数据“1”,为低电平时表示数据“0”。
当SCL 为低电平时,SDA 的数据无效,一般在这个时候SDA 进行电平切换,为下一次表示数据做好准备。
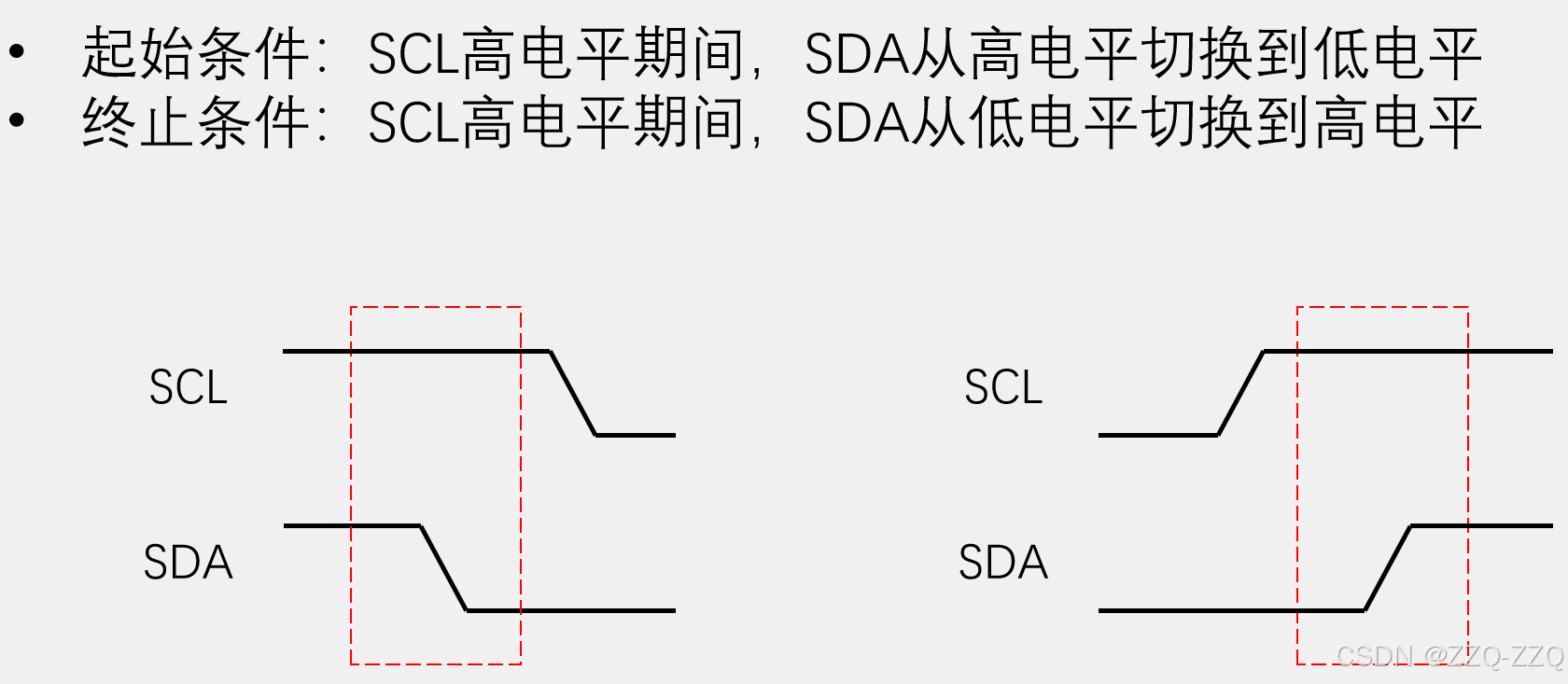
当主从机均不拉低SDA时,SDA为高电平(因为有上拉),我们把主/从机控制SDA从低电平到高电平的过程叫做“放手”,易知“放手”状态时SDA为高电平
起始条件:SCL高电平期间,主机把SDA拉低
终止条件:SCL高电平期间,主机把SDA拉高
起始和终止信号均由主机控制,从机不可控制
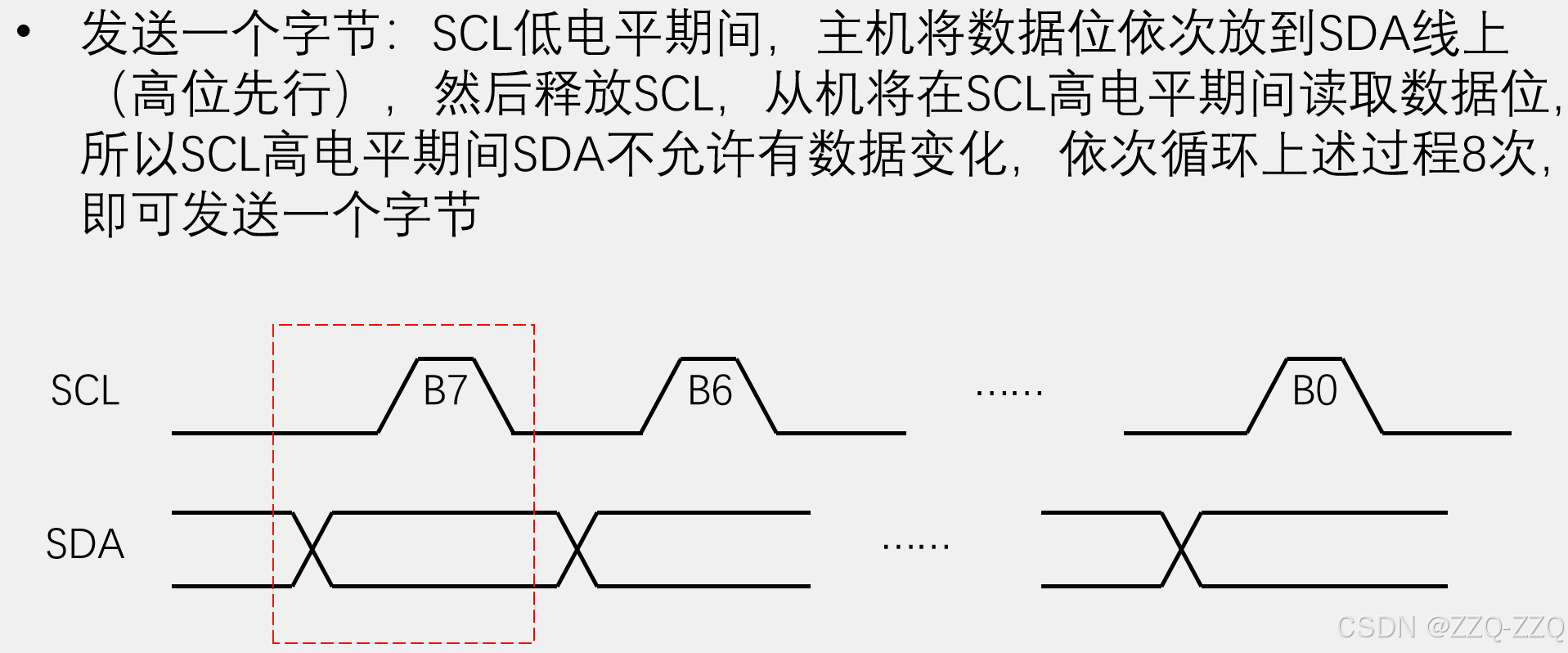
主机发送数据时:在SCL低电平期间主机把数据放到SDA上(放好后主机就松手SCL,使其为高电平),从机在SCL高电平期间读取该数据(一般在SCL上升沿时刻从机就开始读取SDA,毕竟SCL高电平时长由主机控制,从机得尽快防止错过)。一段时间后,主机拉低SCL,随后重复上述过程,发送下一字节。
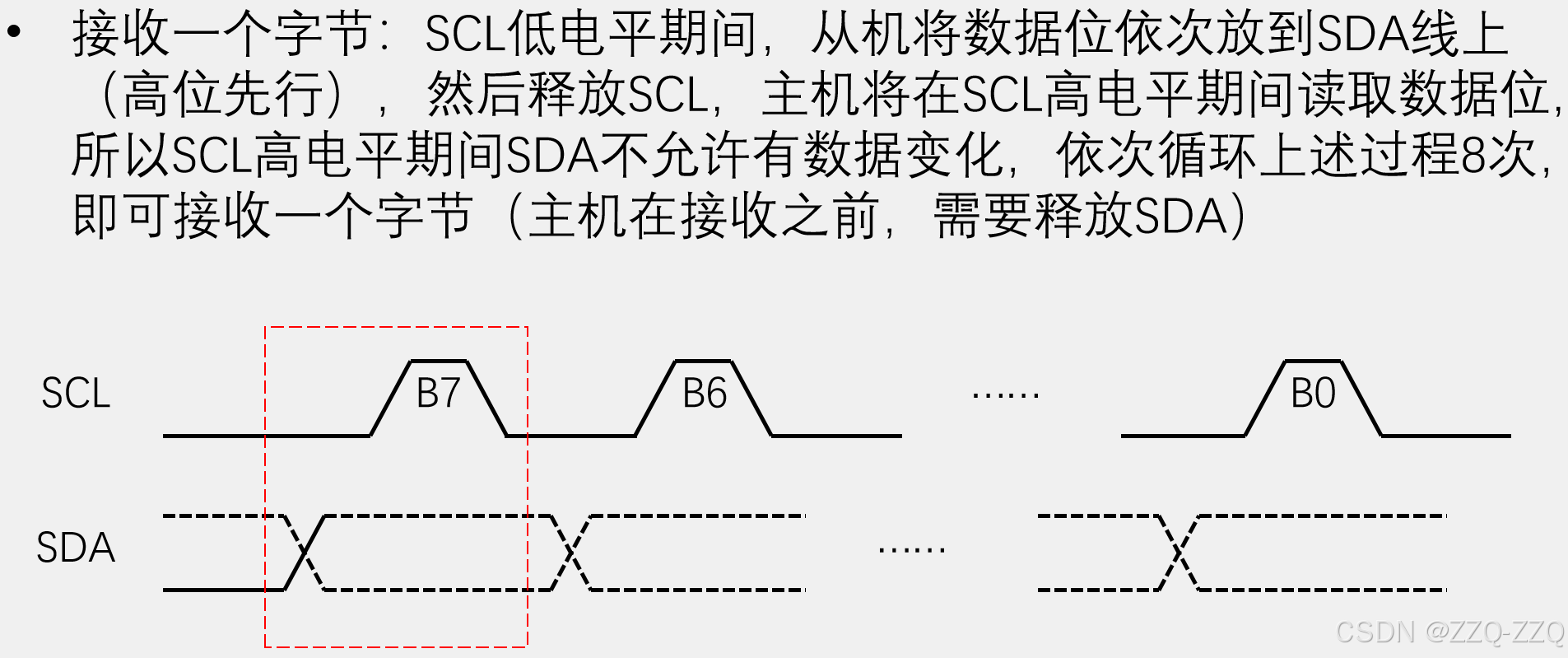
主机接收数据时:主机在接收之前,需要释放SDA。在SCL低电平期间从机把数据放到SDA上,主机释放SCL后,主机在SCL高电平期间读取数据位,随后主机拉低SCL,重复上述过程。(在SCL下降沿时,从机就会把数据往SDA上放,毕竟SCL高电平时长由主机控制,从机得尽快防止错过)。
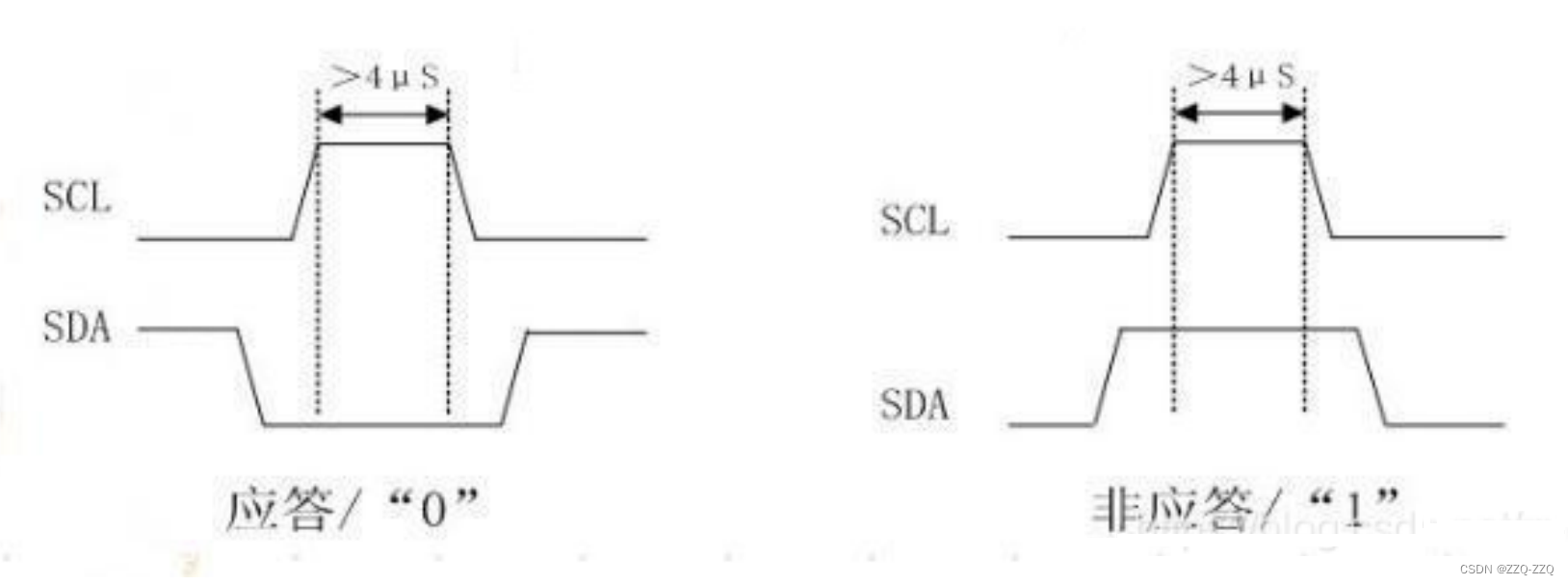
应答信号:数据0表示应答,会继续执行任务;数据1表示非应答,会停止任务
发送应答:主机在接收完一个字节后,在下一个时钟发送一位数据(应答位)
接收应答:主机在接发送一个字节后,在下一个时钟接收一位数据(应答位)
在SCL的高电平期间不允许变化数据,只有一种情况:SCL高电平期间SDA拉低表示起始位

① 在SCL的高电平期间不允许变化数据,只有一种情况:SCL高电平期间SDA拉低表示起始
② 若想停止传输,接收数据后给非应答,从机便会释放SDA,把SDA控制器交给主机,主机再发送停止信号,如上图末尾
一般认为:对于主机来说,SCL下降沿写,上升沿读
【51手撸IIC协议代码】
sbit scl = P0^1;
sbit sda = P0^3;
void IIC_Start()
{
scl = 0;
sda = 1;
scl = 1;
_nop_(); // 约5us
sda = 0;
_nop_();
}
void IIC_Stop()
{
sda = 0;
scl = 1;
_nop_();
sda = 1;
_nop_();
}
char IIC_ACK()
{
char flag;
sda = 1;//就在时钟脉冲9期间释放数据线
_nop_();
scl = 1;
_nop_();
flag = sda;
_nop_();
scl = 0;
_nop_();
return flag;
}
void IIC_Send_Byte(char dataSend)
{
int i;
for(i = 0;i<8;i++)
{
scl = 0; //scl拉低,让sda做好数据准备
sda = dataSend & 0x80; //1000 0000获得dataSend的最高位,给sda
_nop_(); //发送数据建立时间
scl = 1; //scl拉高开始发送
_nop_(); //数据发送时间
scl = 0; //发送完毕拉低
_nop_();
dataSend = dataSend << 1;
}
}【32 IIC demo】
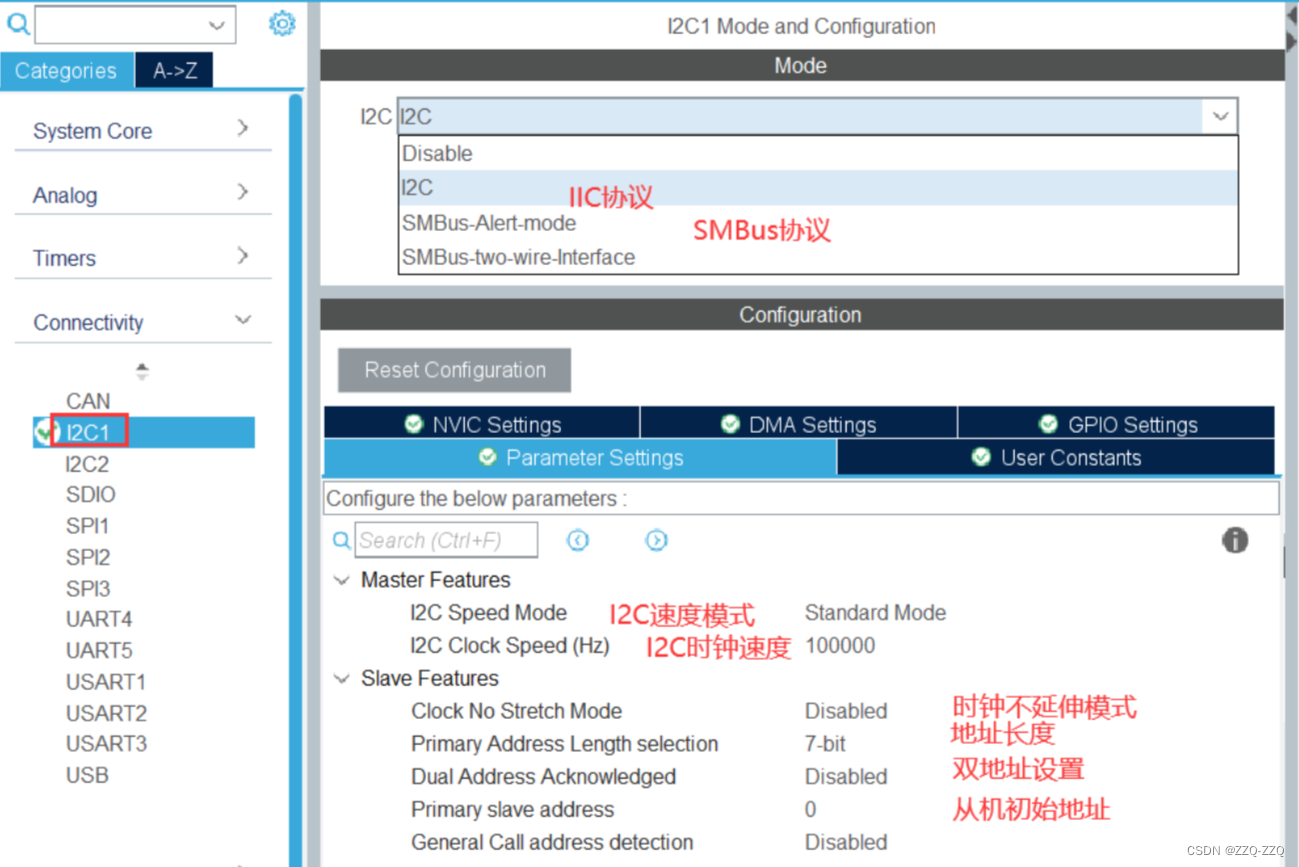
STM32的I2C协议也支持SMBus模式(一般用于笔记本电池管理)
Master features: 主模式特性
I2C Speed Mode: IIC模式设置 快速模式和标准模式。
I2C Clock Speed: IIC传输速率,默认为100KHz
Slave features: 从模式特性
Clock No Stretch Mode: 时钟没有扩展模式
Primary Address Length selection: 从设备地址长度 7bit/10bit,大部分为7bit
Dual Address Acknowledged: 双地址确认
Primary slave address: 从设备初始地址
// IIC写函数
HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
// 参数:
// *hi2c 设置使用的IIC 名称 例:&hi2c1
// DevAddress 写入的地址 例 0xA0
// *pData 需要写入的数据的地址
// Size 要发送的字节数
// Timeout 最大传输时间,超过传输时间将自动退出传输函数
//示例: HAL_I2C_Master_Transmit(&hi2c1,0xA0,(uint8_t*)tx_data,100,1000);
// IIC读函数,读一个字节
HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
// 参数:
// *hi2c: 设置使用的是那个IIC 名称 例:&hi2c1
// DevAddress: 读取的地址 例 0xA0
// *pData: 存储读取到的数据的地址
// Size: 接收的字节数
// Timeout: 最大读取时间,超过时间将自动退出读取函数
//示例: HAL_I2C_Master_Receive(&hi2c1,0xA0,(uint8_t*)rx_data,100,1000);// IIC写数据函数
HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c,
uint16_t DevAddress,
uint16_t MemAddress,
uint16_t MemAddSize,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout)
// *hi2c: 设置使用的是那个IIC 名称 例:&hi2c1
// DevAddress: 从机设备地址,七位地址必须左对齐
// MemAddress:从机寄存器地址
// MemAddSize:从机寄存器地址长度
// *pData: 存储读取到的数据的地址
// Size: 接收的字节数
// Timeout: 最大读取时间,超过时间将自动退出写入函数
// 返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)使用 HAL_I2C_Mem_Write 等于先使用 HAL_I2C_Master_Transmit 传输第一个寄存器地址,再用 HAL_I2C_Master_Transmit 传输写入第一个寄存器的数据
【OLED概述】
【时序】
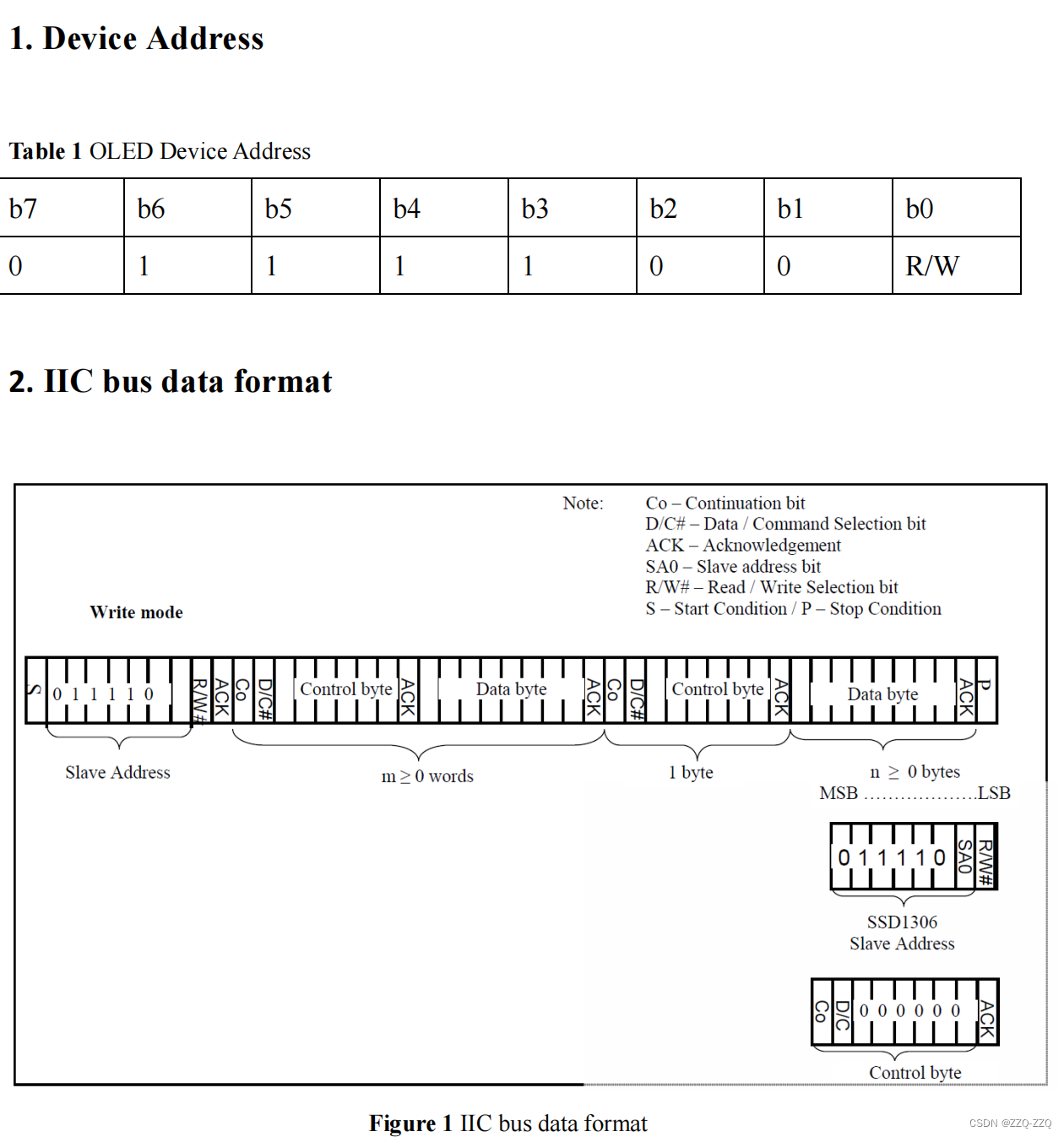
写命令/数据的代码(32不需要用这个,因为32的IIC初始化有相应的库函数)
/*
1. start()
2. 写入 b0111 1000 0x78
3. ACK
4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
5. ACK
6. 写入指令/数据
7. ACK
8. STOP
*/
void Oled_Write_Cmd(char dataCmd)
{
IIC_Start(); // 1. start()
IIC_Send_Byte(0x78); // 2. 写入从机地址 b0111 1000 0x78
IIC_ACK(); // 3. ACK
IIC_Send_Byte(0x00); // 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
IIC_ACK(); // 7. ACK
IIC_Send_Byte(dataCmd); // 6. 写入指令/数据
IIC_ACK(); // 7. ACK
IIC_Stop(); // 8. STOP
}
void Oled_Write_Data(char dataData)
{
IIC_Start(); // 1. start()
IIC_Send_Byte(0x78); // 2. 写入从机地址 b0111 1000 0x78
IIC_ACK(); // 3. ACK
IIC_Send_Byte(0x00); // 4. cotrol byte: (0)(0)000000 写入命令 (0)(1)000000写入数据
IIC_ACK(); // 5. ACK
IIC_Send_Byte(dataData);// 6. 写入指令/数据
IIC_ACK(); // 7. ACK
IIC_Stop(); // 8. STOP
}32写命令/数据的代码
void Oled_Write_Cmd(uint8_t dataCmd) // 写命令
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT, &dataCmd, 1, 0xff);
}
void Oled_Write_Data(uint8_t dataData) // 写数据
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT, &dataData, 1, 0xff);
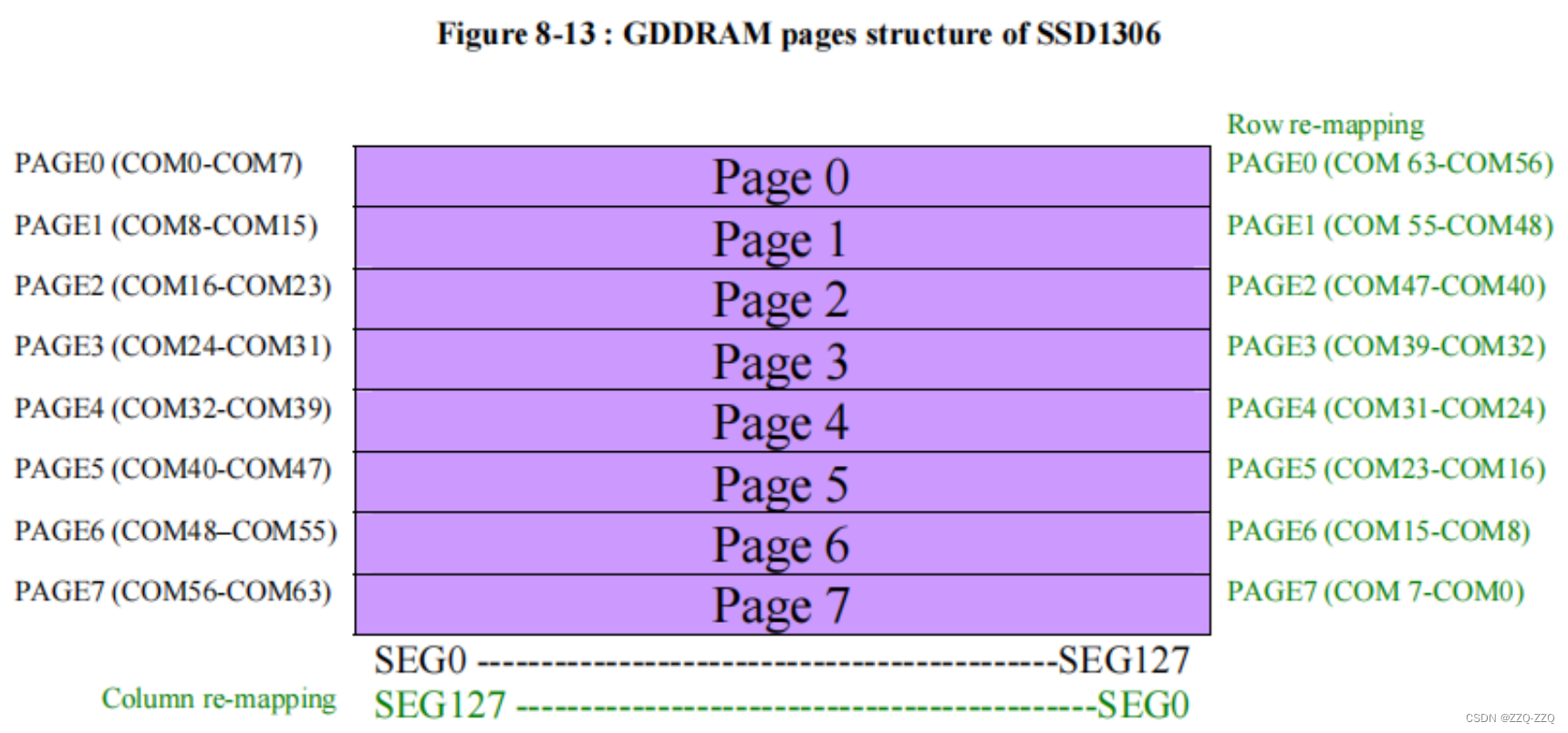
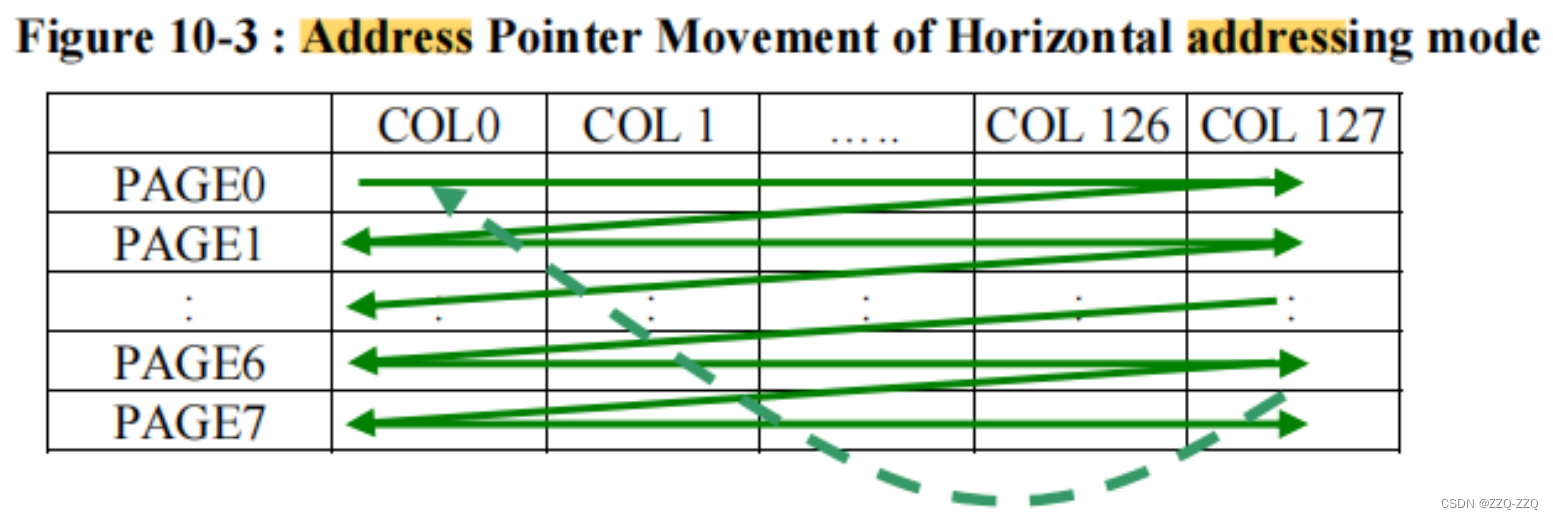
}OLED有三种模式,分别为页地址模式,水平地址模式和垂直地址模式,可以通过以下表格配置
内存管理
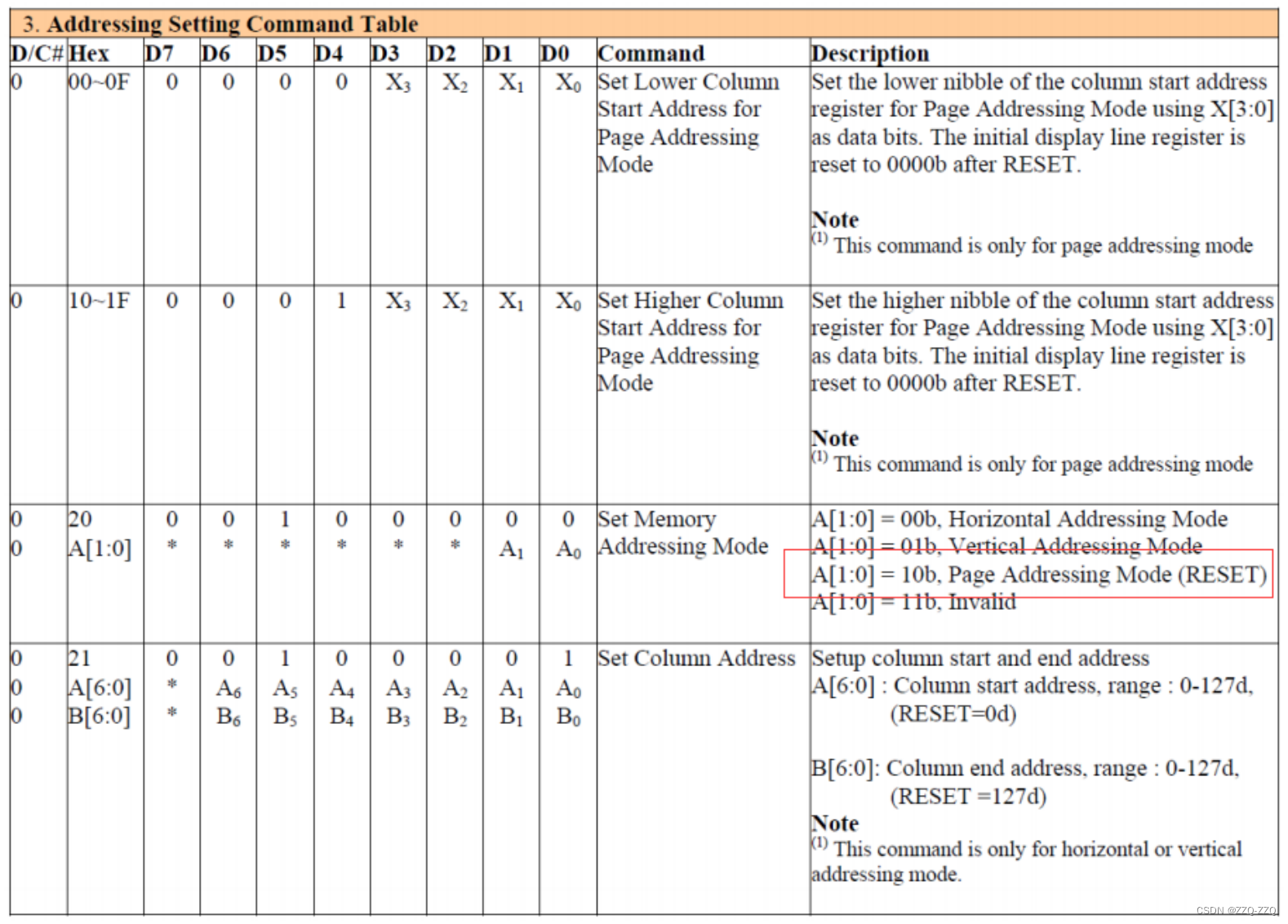
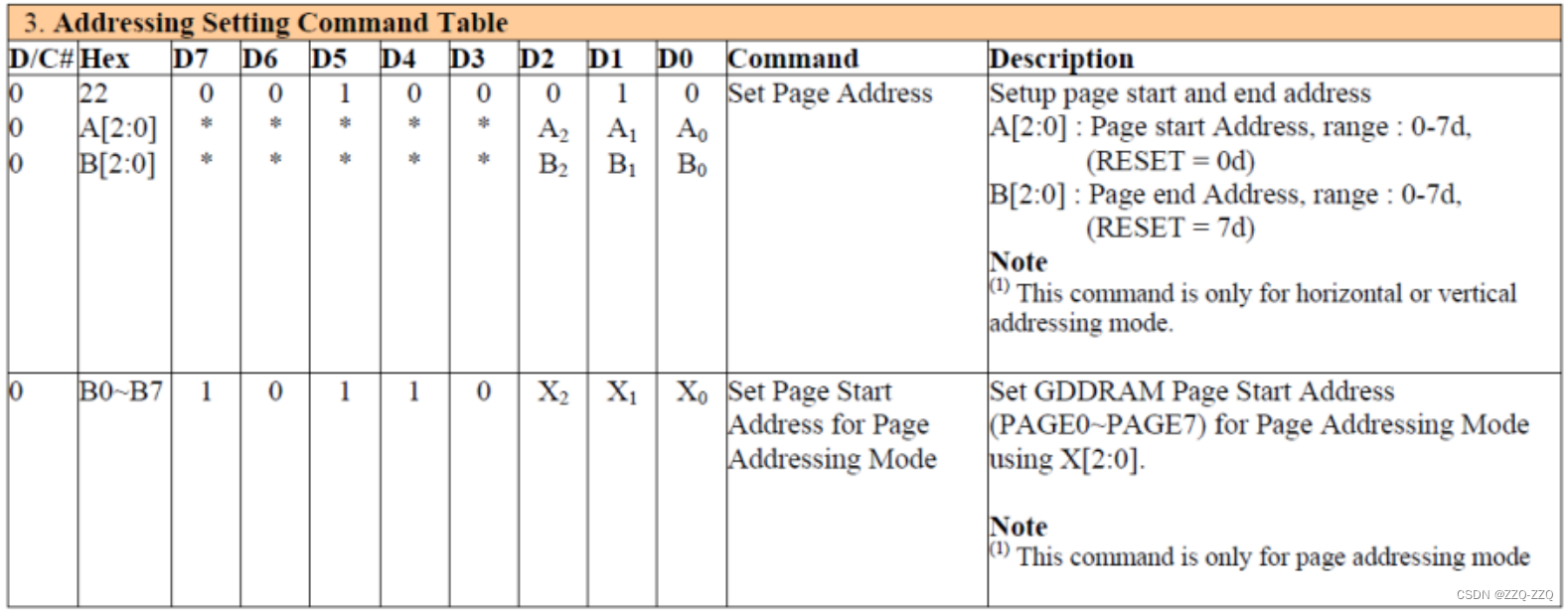
页地址模式(最后一列写完回到该行首列)
1. 发送cmd:0x20
2. 发送cmd:0x02 // 默认页模式
设置行:page(见下)
设置列:上表的前两行,首列低位00,高位10
Oled_Write_Cmd(0x00);
Oled_Write_Cmd(0x10);
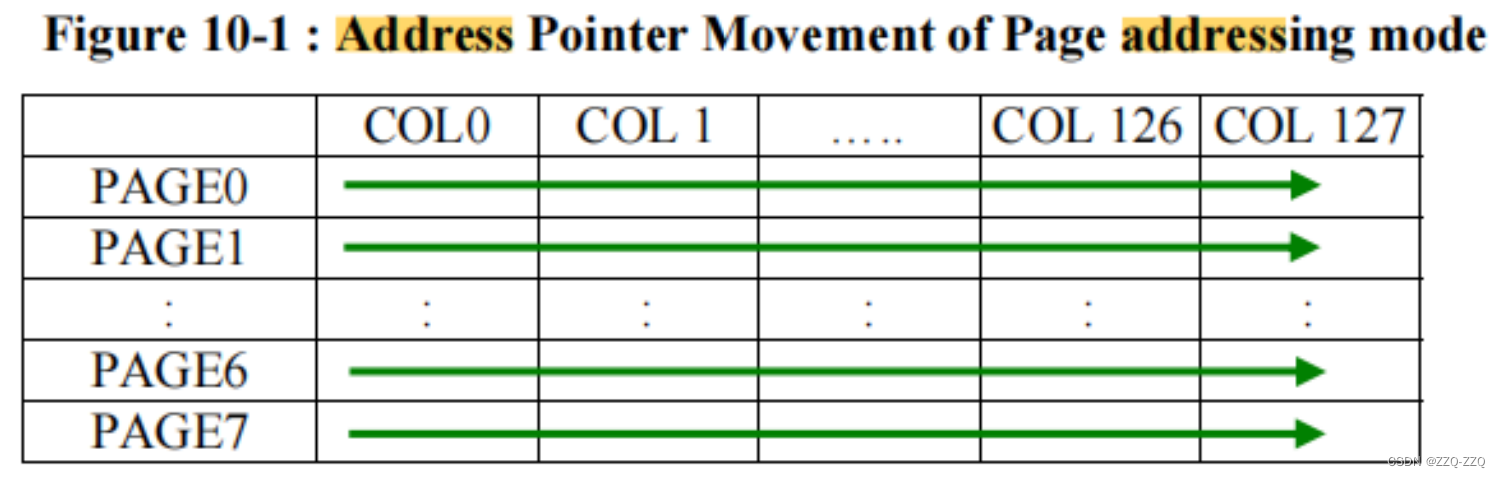
水平地址模式(最后一列写完回到下行首列)
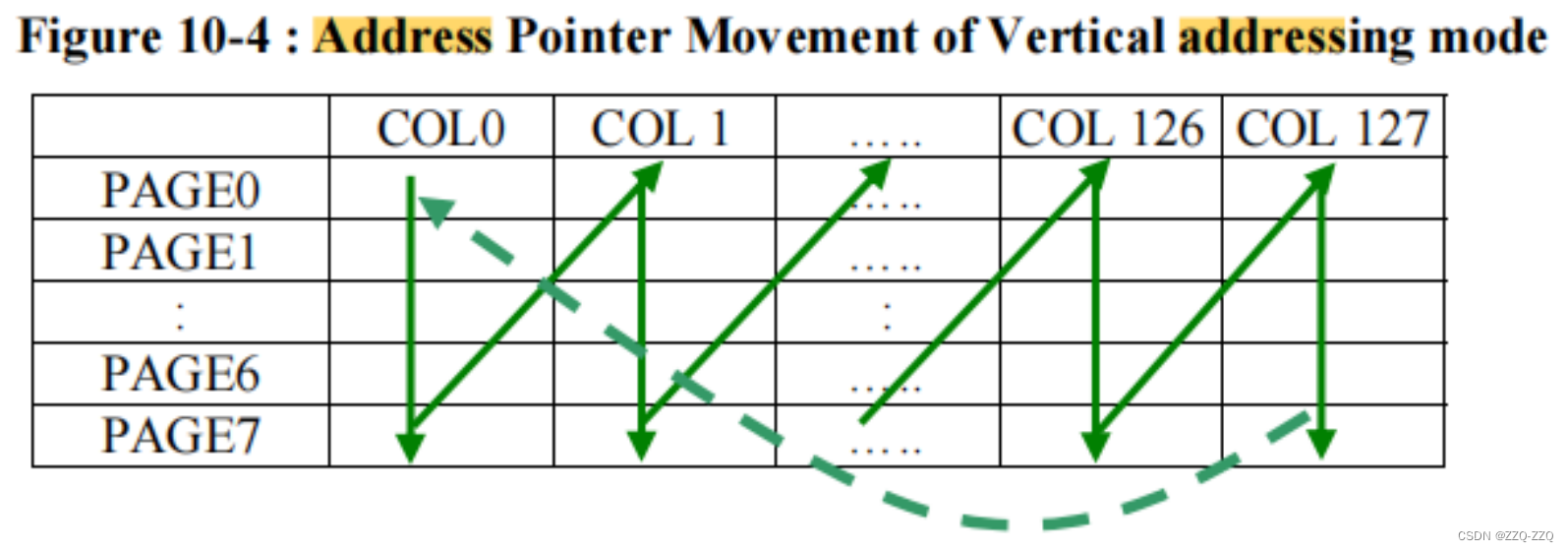
垂直地址模式
列地址选择
选择page0:1011 0000 = 0xB0
【demo · 显示一个点】
/* i2c.c */ 与下面相同,此处仅列出主函数
/* main.c */
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
Oled_Init(); // OLED初始化
Oled_Screen_Clear();
Oled_Write_Cmd(0x20);
Oled_Write_Cmd(0x02); // 设置页寻址模式
Oled_Write_Cmd(0xB0); // 设置PAGE0 1011 0000
Oled_Write_Cmd(0x00);
Oled_Write_Cmd(0x10); // 设置首列
Oled_Write_Data(0x08); // 显示一个点(若循环写该命令,则点动成线,因为页地址自移)
while (1)
{
}
}【demo · 显示图片】
demo概述:
硬件接线:
/* i2c.c */
void Oled_Write_Cmd(uint8_t dataCmd) // 写命令
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT, &dataCmd, 1, 0xff);
}
void Oled_Write_Data(uint8_t dataData) // 写数据
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT, &dataData, 1, 0xff);
}
void Oled_Init(void)
{
Oled_Write_Cmd(0xAE); //--display off
Oled_Write_Cmd(0x00); //---set low column address
Oled_Write_Cmd(0x10); //---set high column address
Oled_Write_Cmd(0x40); //--set start line address
Oled_Write_Cmd(0xB0); //--set page address
Oled_Write_Cmd(0x81); // contract control
Oled_Write_Cmd(0xFF); //--128
Oled_Write_Cmd(0xA1); //set segment remap
Oled_Write_Cmd(0xA6); //--normal / reverse
Oled_Write_Cmd(0xA8); //--set multiplex ratio(1 to 64)
Oled_Write_Cmd(0x3F); //--1/32 duty
Oled_Write_Cmd(0xC8); //Com scan direction
Oled_Write_Cmd(0xD3); //-set display offset
Oled_Write_Cmd(0x00); //
Oled_Write_Cmd(0xD5); //set osc division
Oled_Write_Cmd(0x80); //
Oled_Write_Cmd(0xD8); //set area color mode off
Oled_Write_Cmd(0x05); //
Oled_Write_Cmd(0xD9); //Set Pre-Charge Period
Oled_Write_Cmd(0xF1); //
Oled_Write_Cmd(0xDA); //set com pin configuartion
Oled_Write_Cmd(0x12); //
Oled_Write_Cmd(0xDB); //set Vcomh
Oled_Write_Cmd(0x30); //
Oled_Write_Cmd(0x8D); //set charge pump enable
Oled_Write_Cmd(0x14); //
Oled_Write_Cmd(0xAF); //--turn on oled panel
}
void Oled_Screen_Clear(void)
{
int i,n;
Oled_Write_Cmd (0x20); //set memory addressing mode
Oled_Write_Cmd (0x02); //page addressing mode
for(i=0;i<8;i++)
{
Oled_Write_Cmd(0xB0+i); //PAGE0 - PAGE7
Oled_Write_Cmd(0x00); //éè????ê??????aáDμíμ??·
Oled_Write_Cmd(0x10); //éè????ê??????aáD??μ??·
for(n=0;n<128;n++) Oled_Write_Data(0x00); // 0-127列,依次写入0,每写入数据,列地址自动偏移
}
}
unsigned char bmpImager[] = {
/*-- 调入了一幅图像:D:\无标题.bmp --*/
/*-- 宽度x高度=128x64 --128x8x8*/
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0xF0,0x08,0x0C,0x04,0x06,0x06,0x0C,0x04,0x0C,0xFC,0x1C,0x74,0xFC,0xF8,
0xF0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x01,0x07,0x04,0x88,0xF8,0x08,0x08,0x0C,0x06,0x01,0x00,0x00,0x01,0x1F,
0x7F,0xFF,0xDC,0xF8,0xE0,0xC0,0x40,0xC0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xE0,0x10,0x18,0x08,0x0C,
0x04,0x04,0x06,0x02,0x01,0x01,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x3F,0x60,0xC0,0x80,0x80,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x3F,0xE0,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,
0x03,0x06,0x1C,0xF0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x07,0xFC,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x08,0x08,0x88,0xE8,0x38,0x0E,0x09,0x08,
0x08,0x88,0xE8,0x18,0x08,0x08,0x08,0x00,0x00,0xFF,0x89,0x89,0x89,0xFF,0x00,0xFF,
0x89,0x89,0x89,0x89,0xFF,0x00,0x00,0x04,0x04,0x84,0x74,0x6F,0xA4,0x24,0x24,0x24,
0x24,0xA4,0x64,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x80,0xF0,0x1F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x7F,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x10,0x10,0x10,0x08,0x09,0x09,0x06,0x06,
0x06,0x05,0x08,0x08,0x10,0x10,0x00,0x00,0x0C,0x03,0x10,0x10,0x10,0x1F,0x18,0x07,
0x00,0x00,0x10,0x10,0x1F,0x00,0x10,0x08,0x06,0x11,0x10,0x08,0x09,0x0A,0x06,0x06,
0x0B,0x08,0x10,0x10,0x10,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xF0,
0x1E,0x03,0x00,0x00,0xC0,0x60,0x30,0x0C,0x04,0x06,0x02,0x01,0x01,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x03,
0x1E,0x60,0x78,0x0F,0x01,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
};
void Oled_Show_Image(unsigned char *image)
{
unsigned char i;
unsigned int j;
for(i=0;i<8;i++)
{
Oled_Write_Cmd(0xB0 + i);//page0--page7
//每个page从0列
Oled_Write_Cmd(0x00);
Oled_Write_Cmd(0x10);
//0到127列,依次写入0,每写入数据,列地址自动偏移
for(j = 128 * i; j<(128 * (i+1));j++)
{
Oled_Write_Data(image[j]);
}
}
}/* i2c.h */
extern unsigned char bmpImager[];
void Oled_Write_Cmd(uint8_t dataCmd); // 写命令
void Oled_Write_Data(uint8_t dataData); // 写数据
void Oled_Init(void);
void Oled_Screen_Clear(void);
void Oled_Show_Image(unsigned char *image);/* main.c */
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
Oled_Init(); // OLED初始化
Oled_Write_Cmd(0x20);
Oled_Write_Cmd(0x02); // 设置页寻址模式
Oled_Screen_Clear();
Oled_Show_Image(bmpImager);
while (1)
{
}
}【demo · 模板】
/* OLED_Font.h */
#ifndef __OLED_FONT_H
#define __OLED_FONT_H
# include <stdint.h>
/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,
0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,
0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,
0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,
0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,
0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,
0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,
0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,
0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,
0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,
0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,
0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,
0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,
0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,
0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,
0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,
0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,
0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,
0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,
0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,
0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,
0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,
0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,
0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,
0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,
0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,
0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,
0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,
0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,
0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,
0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,
0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,
0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,
0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,
0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,
0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,
0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,
0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,
0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,
0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,
0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,
0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,
0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,
0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,
0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,
0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,
0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,
0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,
0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,
0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,
0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,
0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,
0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,
0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,
0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,
0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,
0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,
0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,
0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,
0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,
0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,
0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,
0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,
0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
#endif
/* OLED.h */
#ifndef __OLED_H
#define __OLED_H
void OLED_Init(void); // 初始化
void OLED_Clear(void); // 清屏
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char); // 显示字符
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String); // 显示字符串
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); // 显示数字
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length); // 显示有符号数字
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); // 显示16进制数字
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length); // 显示 2进制数字
#endif/* OLED.c */
#include "OLED_Font.h"
#include "stm32f1xx_hal.h"
/*引脚配置*/
#define OLED_W_SCL(x) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, (GPIO_PinState)(x))
#define OLED_W_SDA(x) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, (GPIO_PinState)(x))
/*
void OLED_I2C_Init(void) //引脚初始化
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
*/
void OLED_I2C_Init(void) //引脚初始化
{
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; // 设置为开漏输出
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH; // 设置GPIO速度
HAL_GPIO_Init(GPIOB, &GPIO_InitStructure); // 使用HAL库的函数进行GPIO初始化
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); // 设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); // 设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); // 设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); // 设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); // 显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); // 设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); // 显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
/* main.c */
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
OLED_Init();
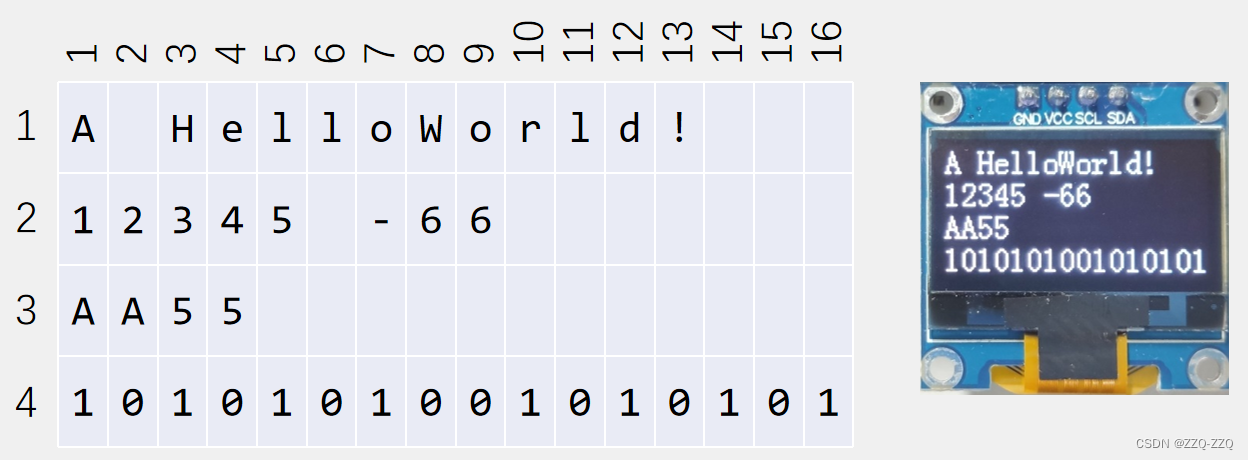
OLED_ShowChar(1, 1, 'A');
OLED_ShowString(1, 3, "HelloWorld!");
OLED_ShowNum(2, 1, 12345, 5);
OLED_ShowSignedNum(2, 7, -66, 2);
OLED_ShowHexNum(3, 1, 0xAA55, 4);
OLED_ShowBinNum(4, 1, 0xAA55, 16);
while (1)
{
}
}
【STM32F4移植】
#define CPU_FREQUENCY_MHZ 84 // STM32实际设计的时钟主频
void delay_us(__IO uint32_t delay)
{
int last, curr, val;
int temp;
while (delay != 0)
{
temp = delay > 900 ? 900 : delay;
last = SysTick->VAL;
curr = last - CPU_FREQUENCY_MHZ * temp;
if (curr >= 0)
{
do
{
val = SysTick->VAL;
}
while ((val < last) && (val >= curr));
}
else
{
curr += CPU_FREQUENCY_MHZ * 1000;
do
{
val = SysTick->VAL;
}
while ((val <= last) || (val > curr));
}
delay -= temp;
}
}
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
HAL_Delay_us(1);
OLED_W_SCL(1);
HAL_Delay_us(1);
OLED_W_SDA(0);
HAL_Delay_us(1);
OLED_W_SCL(0);
HAL_Delay_us(1);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
HAL_Delay_us(1);
OLED_W_SCL(1);
HAL_Delay_us(1);
OLED_W_SDA(1);
HAL_Delay_us(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
HAL_Delay_us(1);
OLED_W_SCL(1);
HAL_Delay_us(1);
OLED_W_SCL(0);
HAL_Delay_us(1);
}
OLED_W_SCL(1);
HAL_Delay_us(1);//额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
HAL_Delay_us(1);
}成功!
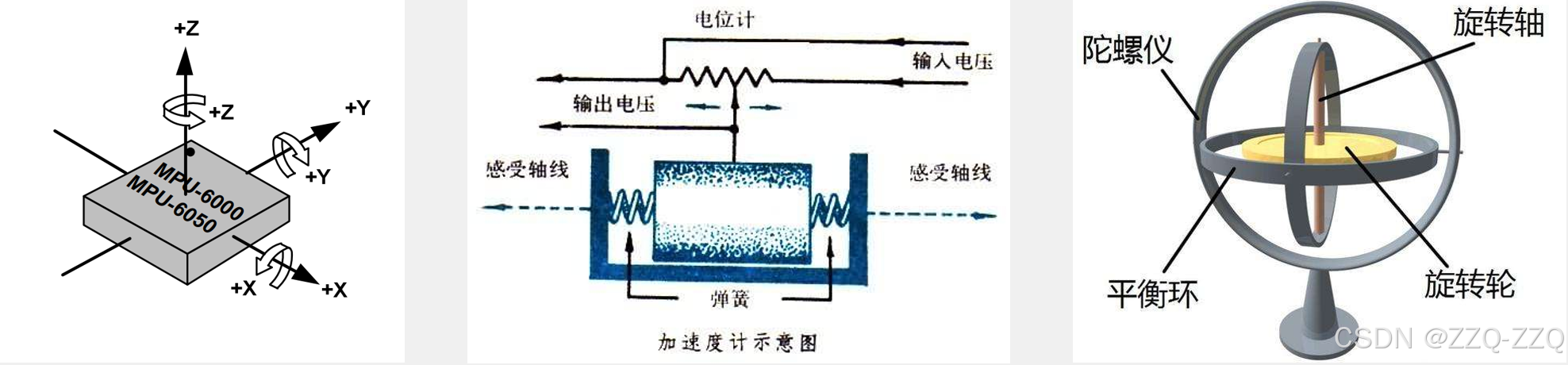
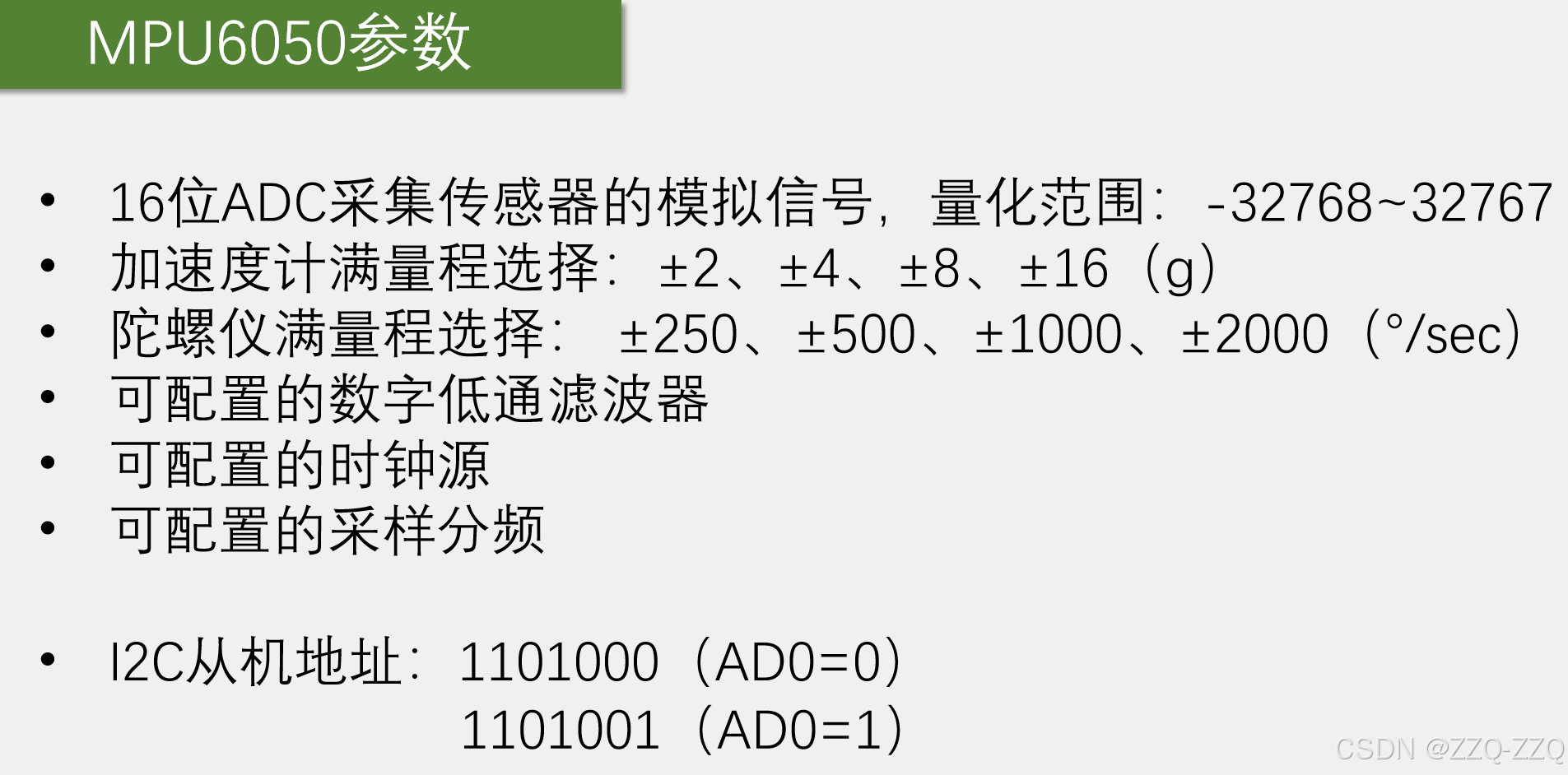
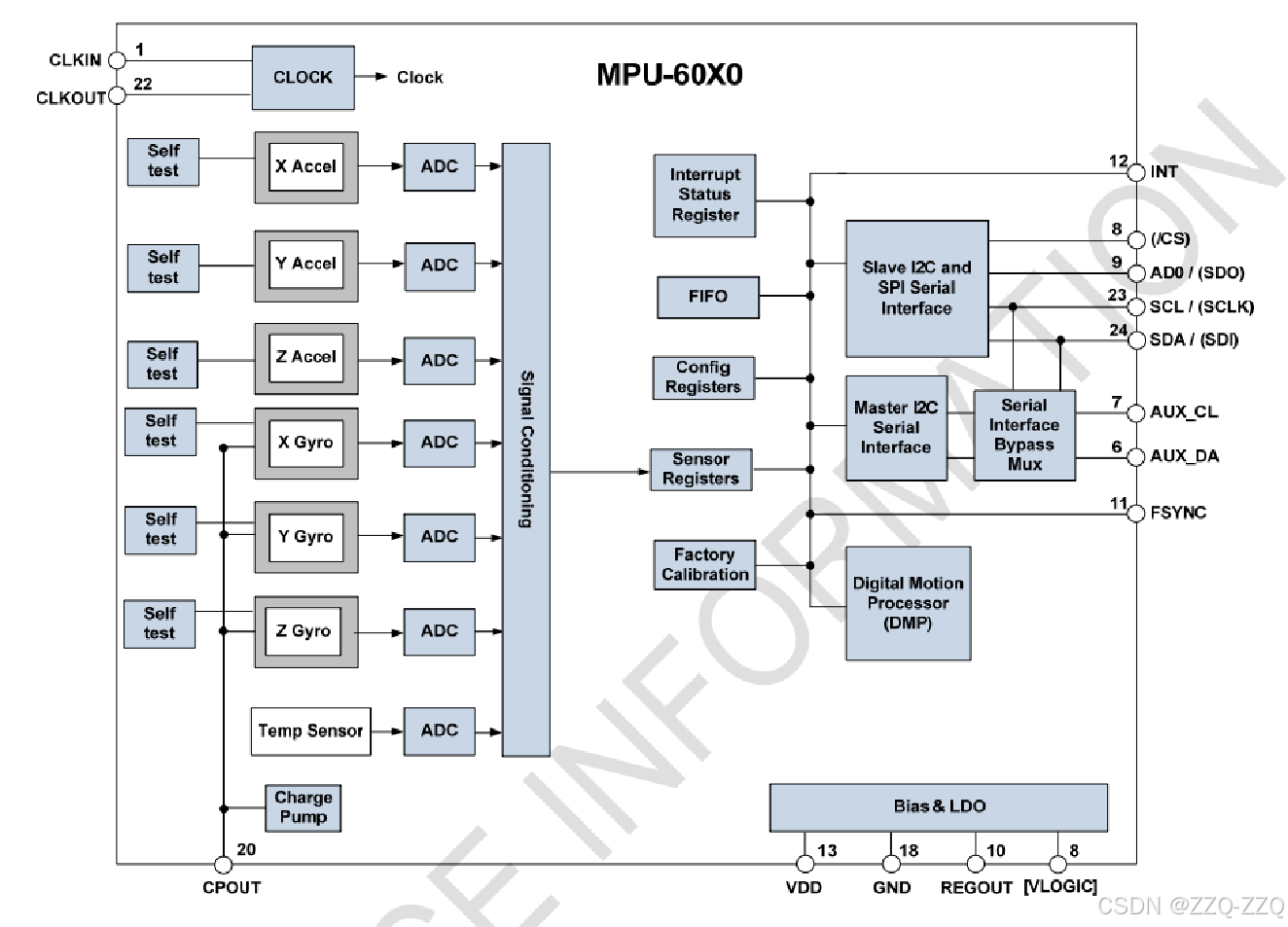
【MPU6050】
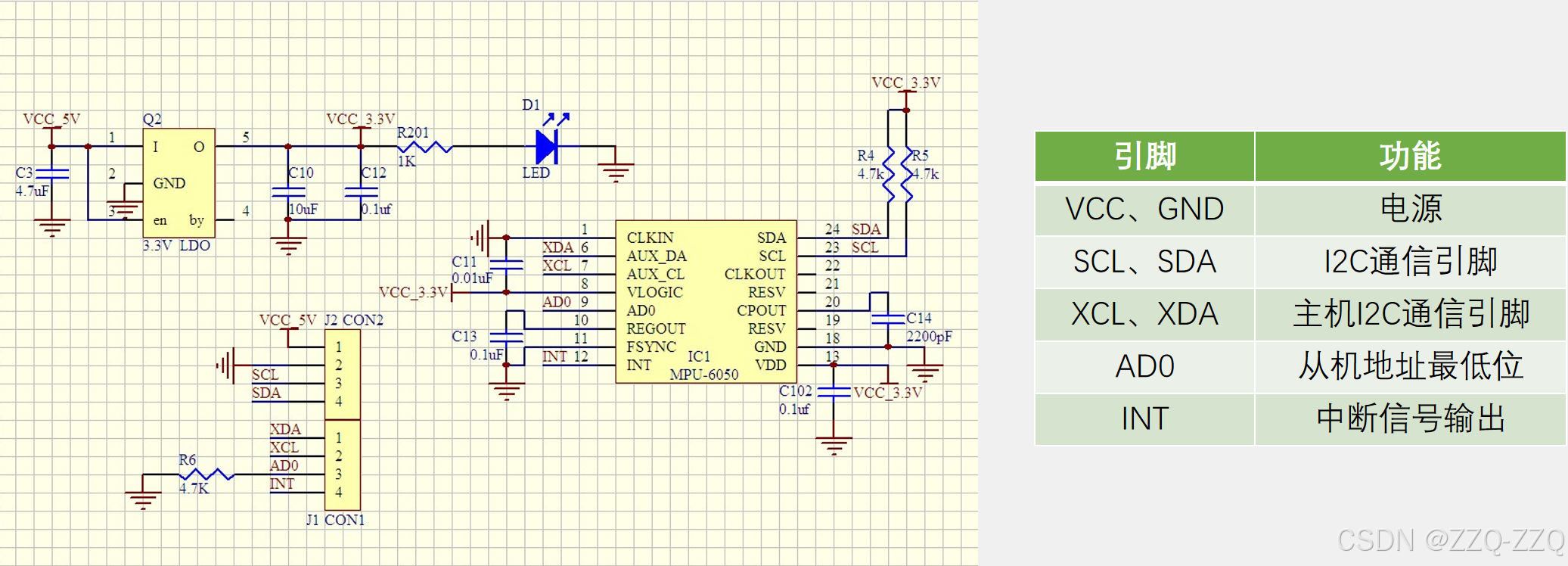
【硬件IIC】
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址
/**
* 函 数:MPU6050等待事件
* 参 数:同I2C_CheckEvent
* 返 回 值:无
*/
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000; //给定超时计数时间
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS) //循环等待指定事件
{
Timeout --; //等待时,计数值自减
if (Timeout == 0) //自减到0后,等待超时
{
/*超时的错误处理代码,可以添加到此处*/
break; //跳出等待,不等了
}
}
}
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6
I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址
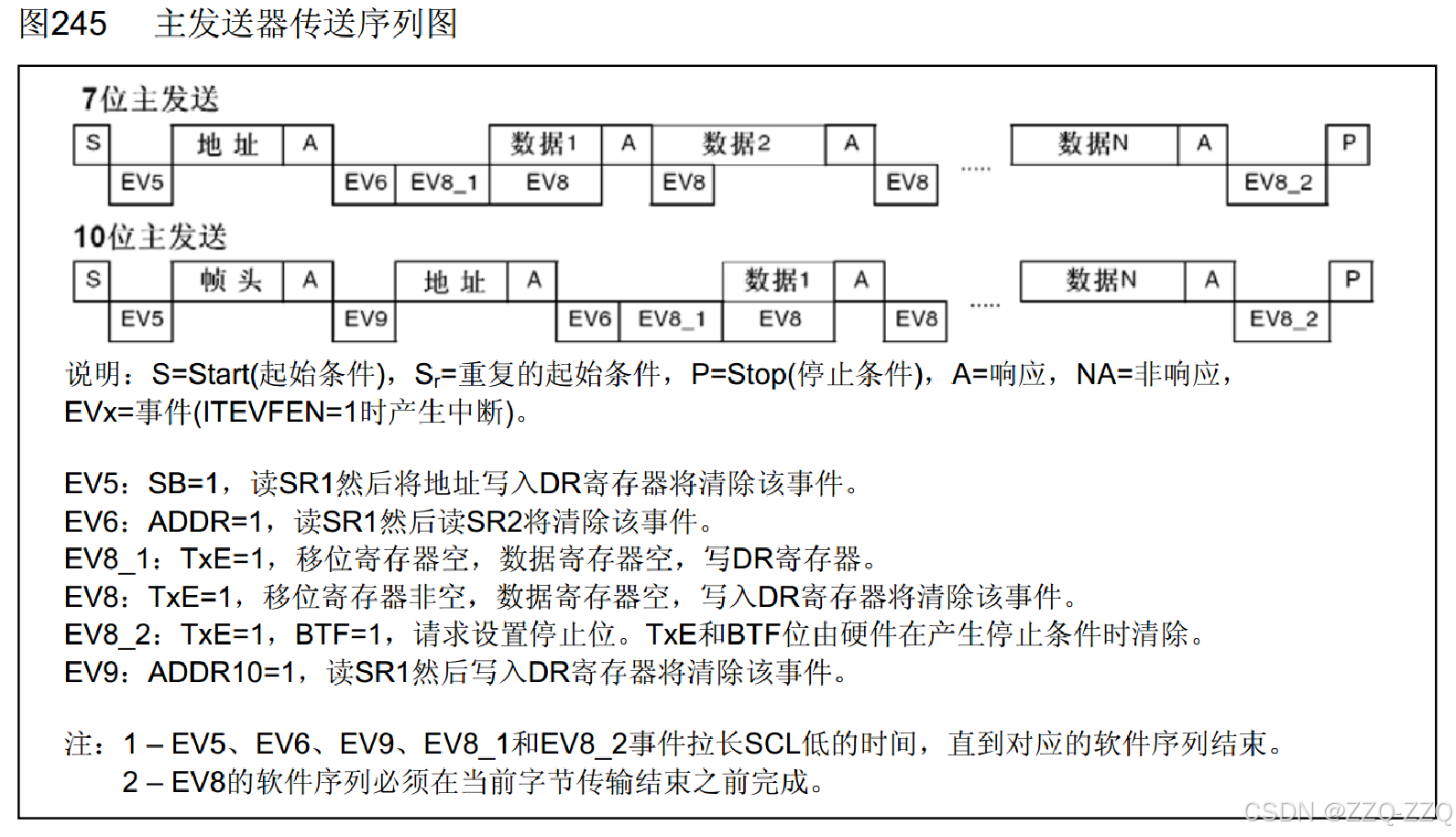
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING); //等待EV8
I2C_SendData(I2C2, Data); //硬件I2C发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2
I2C_GenerateSTOP(I2C2, ENABLE); //硬件I2C生成终止条件
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6
I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址
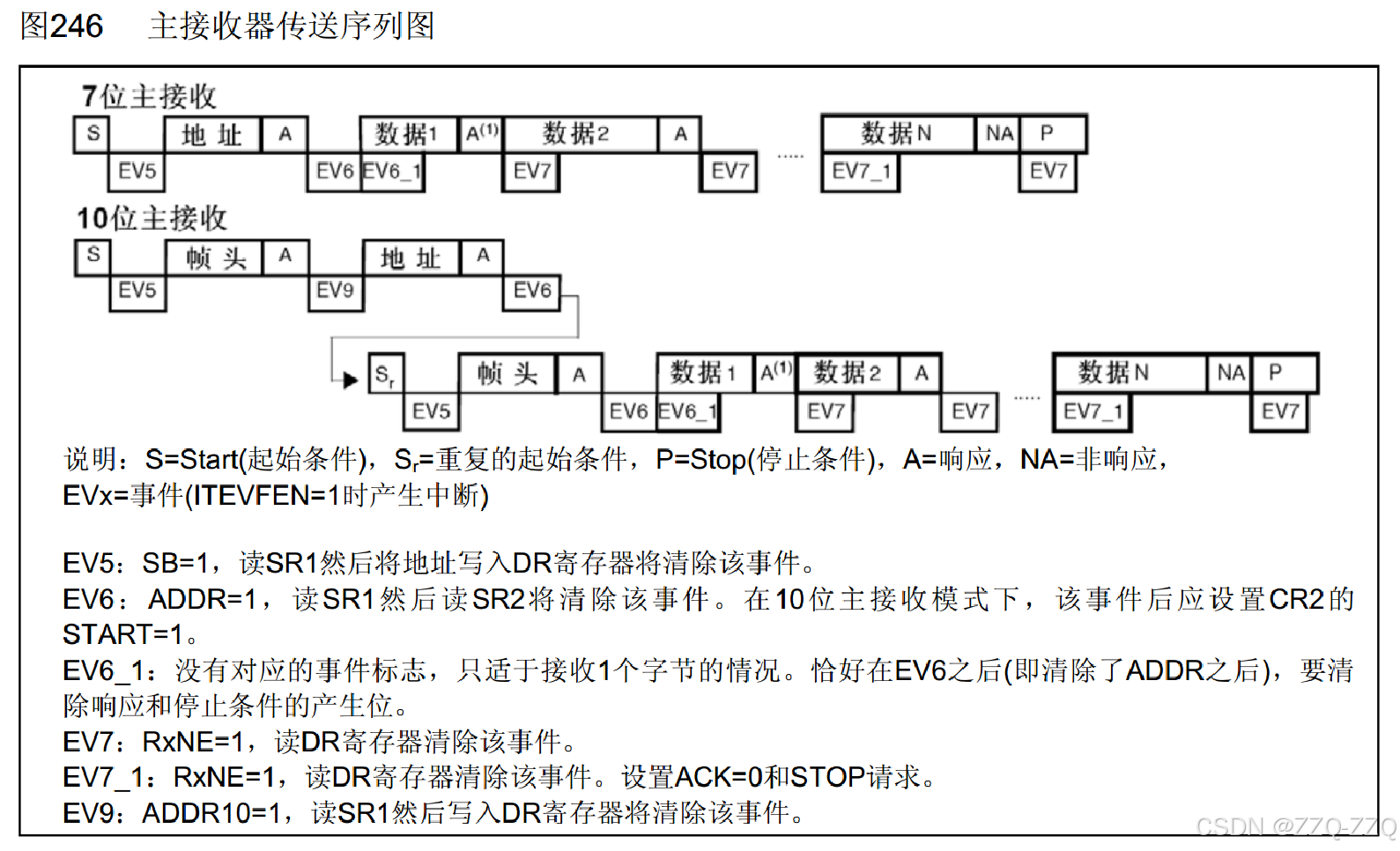
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2
I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成重复起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver); //硬件I2C发送从机地址,方向为接收
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED); //等待EV6
I2C_AcknowledgeConfig(I2C2, DISABLE); //在接收最后一个字节之前提前将应答失能
I2C_GenerateSTOP(I2C2, ENABLE); //在接收最后一个字节之前提前申请停止条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED); //等待EV7
Data = I2C_ReceiveData(I2C2); //接收数据寄存器
I2C_AcknowledgeConfig(I2C2, ENABLE); //将应答恢复为使能,为了不影响后续可能产生的读取多字节操作
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启I2C2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为复用开漏输出
/*I2C初始化*/
I2C_InitTypeDef I2C_InitStructure; //定义结构体变量
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //模式,选择为I2C模式
I2C_InitStructure.I2C_ClockSpeed = 50000; //时钟速度,选择为50KHz
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比,选择Tlow/Thigh = 2
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答,选择使能
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //应答地址,选择7位,从机模式下才有效
I2C_InitStructure.I2C_OwnAddress1 = 0x00; //自身地址,从机模式下才有效
I2C_Init(I2C2, &I2C_InitStructure); //将结构体变量交给I2C_Init,配置I2C2
/*I2C使能*/
I2C_Cmd(I2C2, ENABLE); //使能I2C2,开始运行
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}

















 8690
8690

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









