







一、Cartographer安装
ROS自带有cartographer,因此可以apt安装
sudo apt install ros-melodic-cartographer-ros
sudo apt install ros-melodic-cartographer-rviz
安装map server用于保存地图
sudo apt install ros-melodic-map-server
复制相关文件
roscd cartographer_ros
sudo cp -r ~/XTDrone/sensing/slam/laser_slam/cartographer/* ./
二、Cartographer使用
启动仿真环境
roslaunch px4 indoor3.launch
启动HectorSLAM
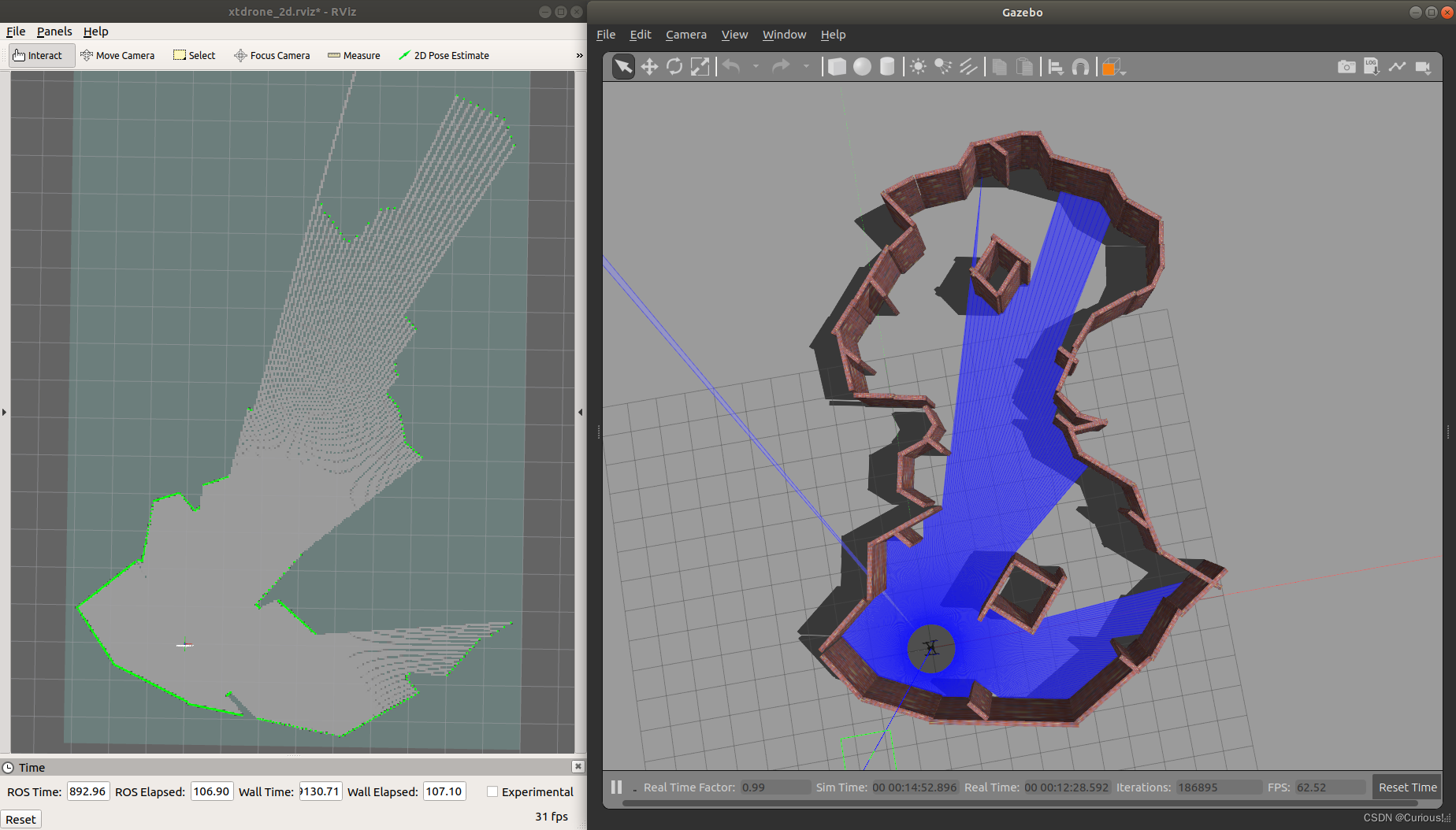
roslaunch cartographer_ros xtdrone_2d.launch
启动通信脚本
cd ~/XTDrone/communication/
python multirotor_communication.py iris 0
将HectorSLAM
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









