







 本文详细介绍了AUTOSAR CanSM模块,包括其在汽车电子架构中的位置、初始化、状态机机制(如从NO_COMMUNICATION到FULL_COMMUNICATION的转换)、Bus Off恢复过程以及通信模式的管理。CanSM作为ComM和CanIf之间的关键组件,负责CAN网络通信的启动和停止,并确保与AUTOSAR标准的兼容。
本文详细介绍了AUTOSAR CanSM模块,包括其在汽车电子架构中的位置、初始化、状态机机制(如从NO_COMMUNICATION到FULL_COMMUNICATION的转换)、Bus Off恢复过程以及通信模式的管理。CanSM作为ComM和CanIf之间的关键组件,负责CAN网络通信的启动和停止,并确保与AUTOSAR标准的兼容。
1 简介
本文主要介绍了AUTOSAR的CanSM模块功能。
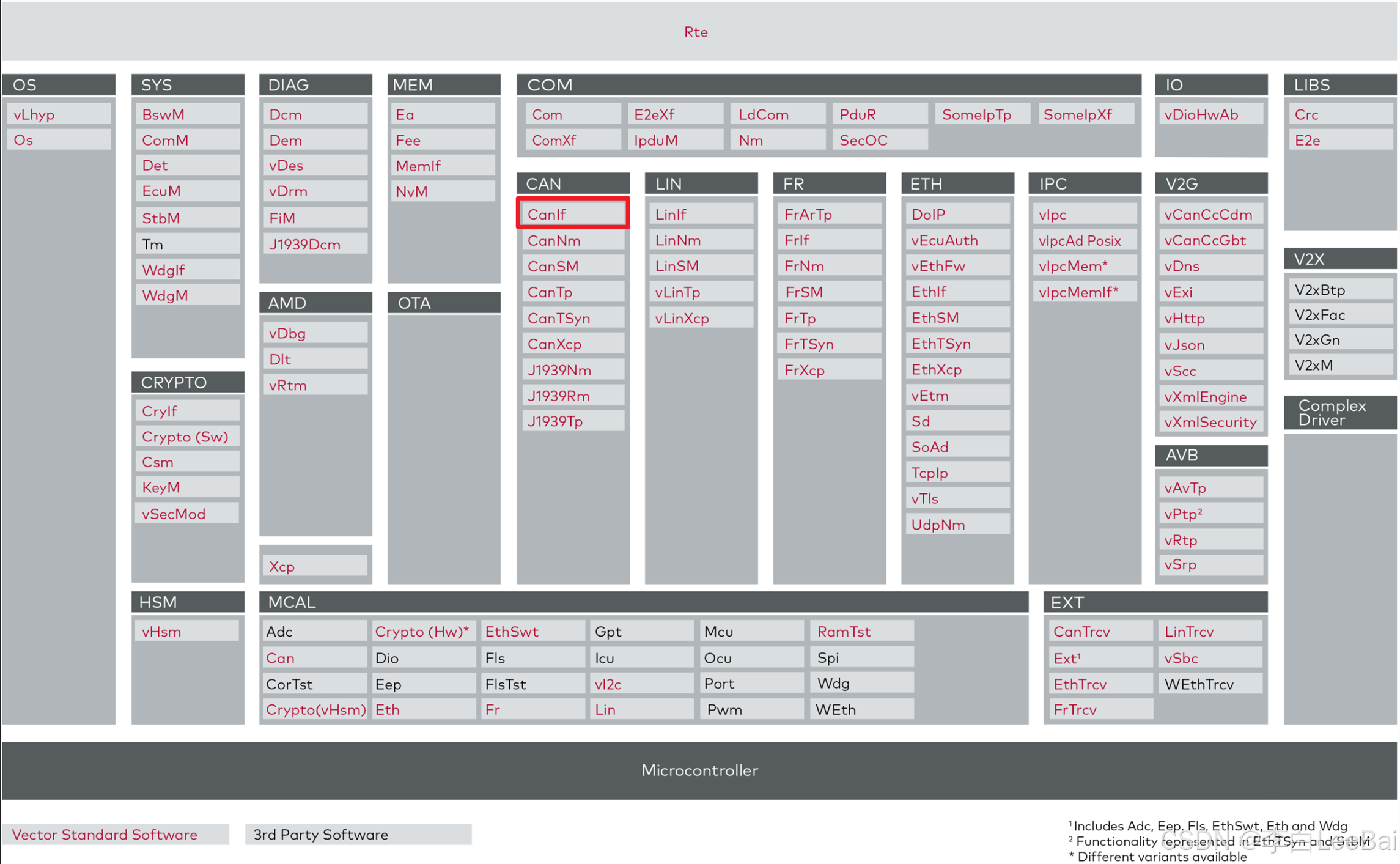
CanSM是位于ComM(通信管理)和CanIf(CAN接口)之间的软件模块。它负责处理CAN网络通信的启动和停止。CanSM将自身的状态映射到ComM上,并根据ComM的请求来改变CanSM的状态。CanSM的主函数由调度器SchM定期调度执行。
1.1 架构概览
CanSM在AUTOSAR架构中的位置如图(下图来源于Vector MICROSAR软件架构)所示:
CanSM与其他模块接口:
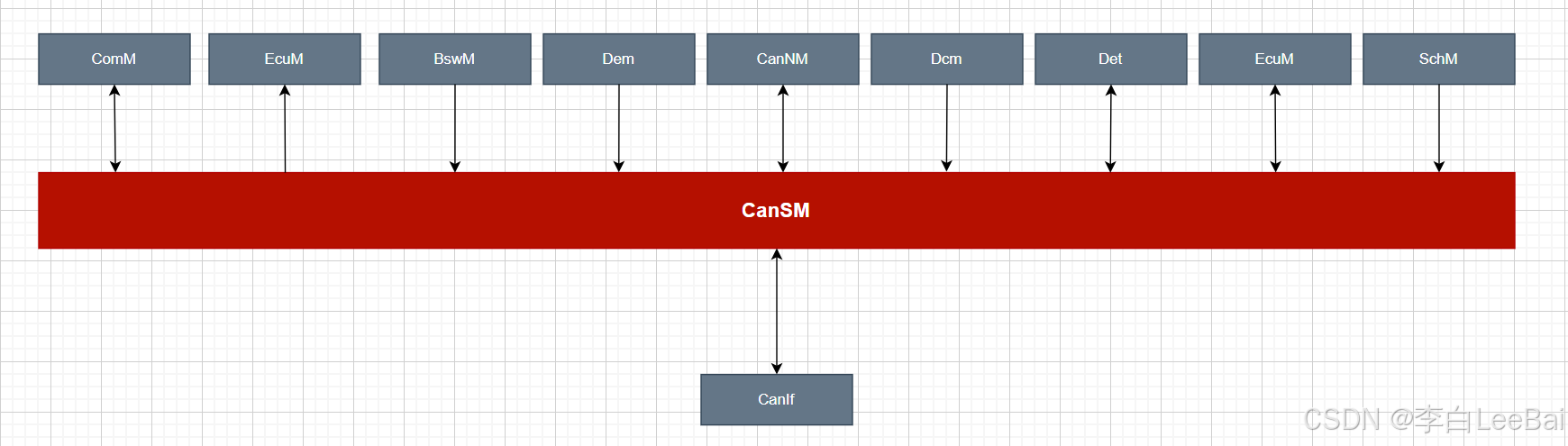
应用层不能直接访问BSW模块的服务,它们必须通过RTE来使用BSW模块提供的服务端口。
2 功能描述
2.1 特性
2.1.1 支持的符合AUTOSAR标准的功能
| 常规功能 | </
|---|

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1027
1027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











