







 LOAM是一种高效的激光SLAM方案,它通过将问题分解为运动估计和环境建图两部分,解决了实时性难题。该方法利用两轴激光雷达在6自由度内工作,通过特征提取和匹配技术来实现定位与建图。此方案因其低漂移和低计算复杂度而闻名。
LOAM是一种高效的激光SLAM方案,它通过将问题分解为运动估计和环境建图两部分,解决了实时性难题。该方法利用两轴激光雷达在6自由度内工作,通过特征提取和匹配技术来实现定位与建图。此方案因其低漂移和低计算复杂度而闻名。
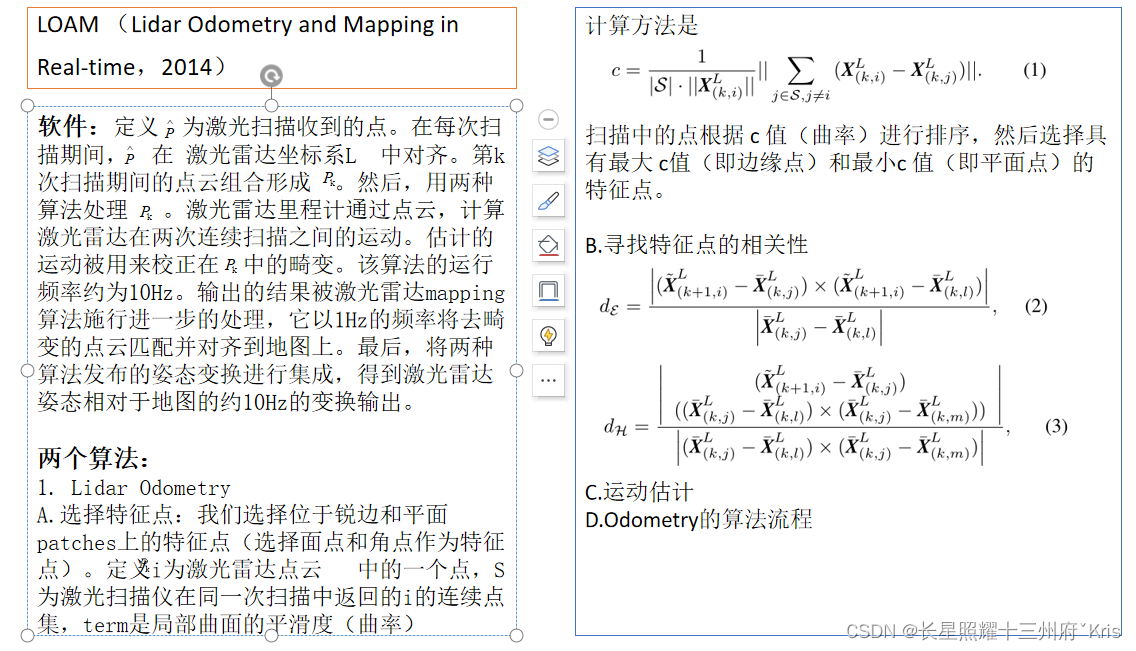
LOAM (Lidar Odometry and Mapping in Real-time,2014)
该论文是Lidar 3D SLAM的经典之作,作者将复杂的SLAM问题分为两个部分:1. 高频但低精度的运动估计; 2. 低频但高精度的环境建图,巧妙地解决了实时性的难题。
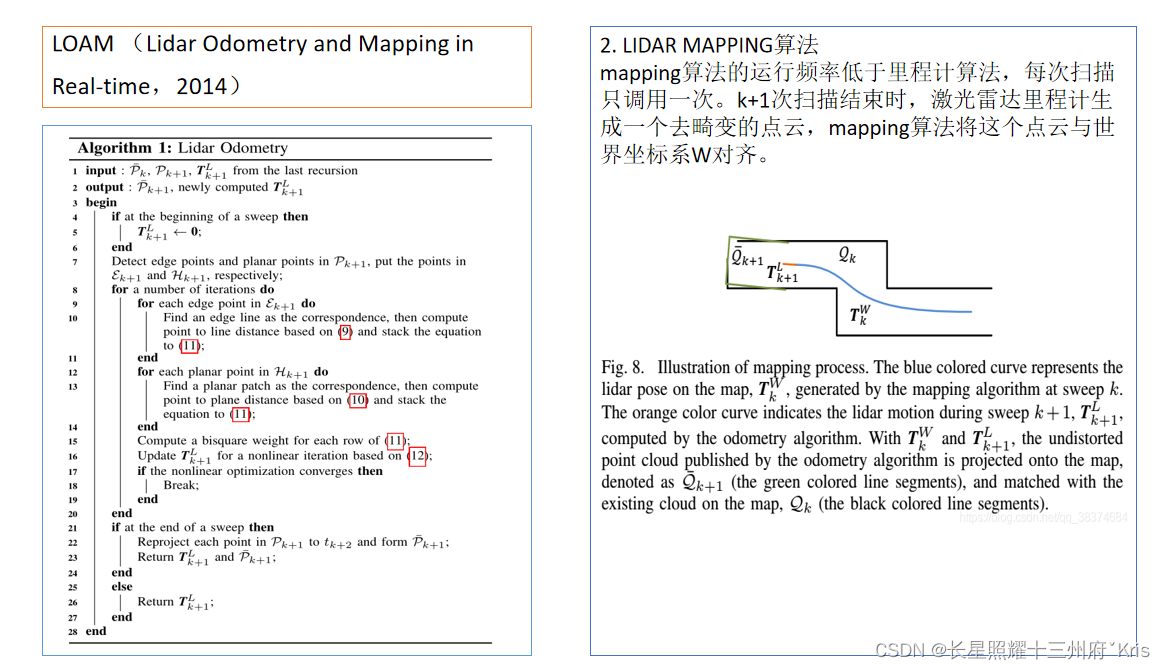
一种odometry算法估计激光雷达的速度并校正点云中的失真,然后一种mapping算法匹配并对齐(registers)点云来创建地图。两种算法的结合保证了所要解决问题的实时性。
该解决方案也长期位居KITTI Odometry评测榜的前3名。
目的:实现激光slam
工具:在6自由度范围内使用两轴激光雷达
难点:1、测量的距离信息在不同时间接收(因为旋转)。
2、运动中的误差会导致最终点云的错误配准。
核心思想:将复杂问题拆分成定位和建图两个部分,分别设计频率和精度。
优势:低漂移和低计算复杂度的方法,无需高精度测距或惯性测量。其他方法通过off-line batch方法可以构建3D地图,并使用loop closure来校正随时间的漂移。

具体来说,这两种算法都提取位于锐边和平面上(sharp edges and planar surfaces)的特征点,并分别将特征点与边线段和平面匹配。在Odometry算法中,通过足够快速的计算来找到特征点的对应关系。在mapping算法中,通过相关的特征值和特征向量检查局部点簇(local point clusters) 的几何分布来确定对应关系。
相关知识积累
IMU:惯性测量单元。能够测量物体三轴加速度及角速度,一般用于系统的测量环节,估计物体位姿。IMU一般包含一个三轴的加速度计和一个三轴的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号,陀螺检测载体相对于导航坐标系的角速度信号,根据测得物体在三维空间中的角速度和加速度可以解算出物体的姿态。 loop closure:回环检测。指机器人识别曾到达某场景,使得地图闭环的能力。说的简单点,就是机器人在左转一下,右转一下建图的时候能意识到某个地方是“我”曾经来过的,然后把此刻生成的地图与刚刚生成的地图做匹配。 如果回环检测成功,可以显著地减小累积误差。因此,回环检测在大面积、大场景地图构建上是非常有必要的 。
loop closure:回环检测。指机器人识别曾到达某场景,使得地图闭环的能力。说的简单点,就是机器人在左转一下,右转一下建图的时候能意识到某个地方是“我”曾经来过的,然后把此刻生成的地图与刚刚生成的地图做匹配。 如果回环检测成功,可以显著地减小累积误差。因此,回环检测在大面积、大场景地图构建上是非常有必要的 。
回环检测成功

回环检测失败
回环检测的方法(如何检测回环是否发生) (1)最简单的方法:对任意两个关键帧进行特征匹配 (2)基于里程计的方法 (3)基于外观的方法


















 3367
3367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











