







 博客讲述运行仿真程序后,在新终端输入命令用键盘控制机器人移动时出现‘package ‘robot_sim_demo’ not found’的错误。经排查并非缺少安装包,正确操作是定位到工作空间,刷新环境,再次输入命令,即可通过键盘控制机器人移动。
博客讲述运行仿真程序后,在新终端输入命令用键盘控制机器人移动时出现‘package ‘robot_sim_demo’ not found’的错误。经排查并非缺少安装包,正确操作是定位到工作空间,刷新环境,再次输入命令,即可通过键盘控制机器人移动。
我们运行仿真程序,你会看到仿真画面启动,仿真界面中包括了软件博物馆和Xbot机器人模型。
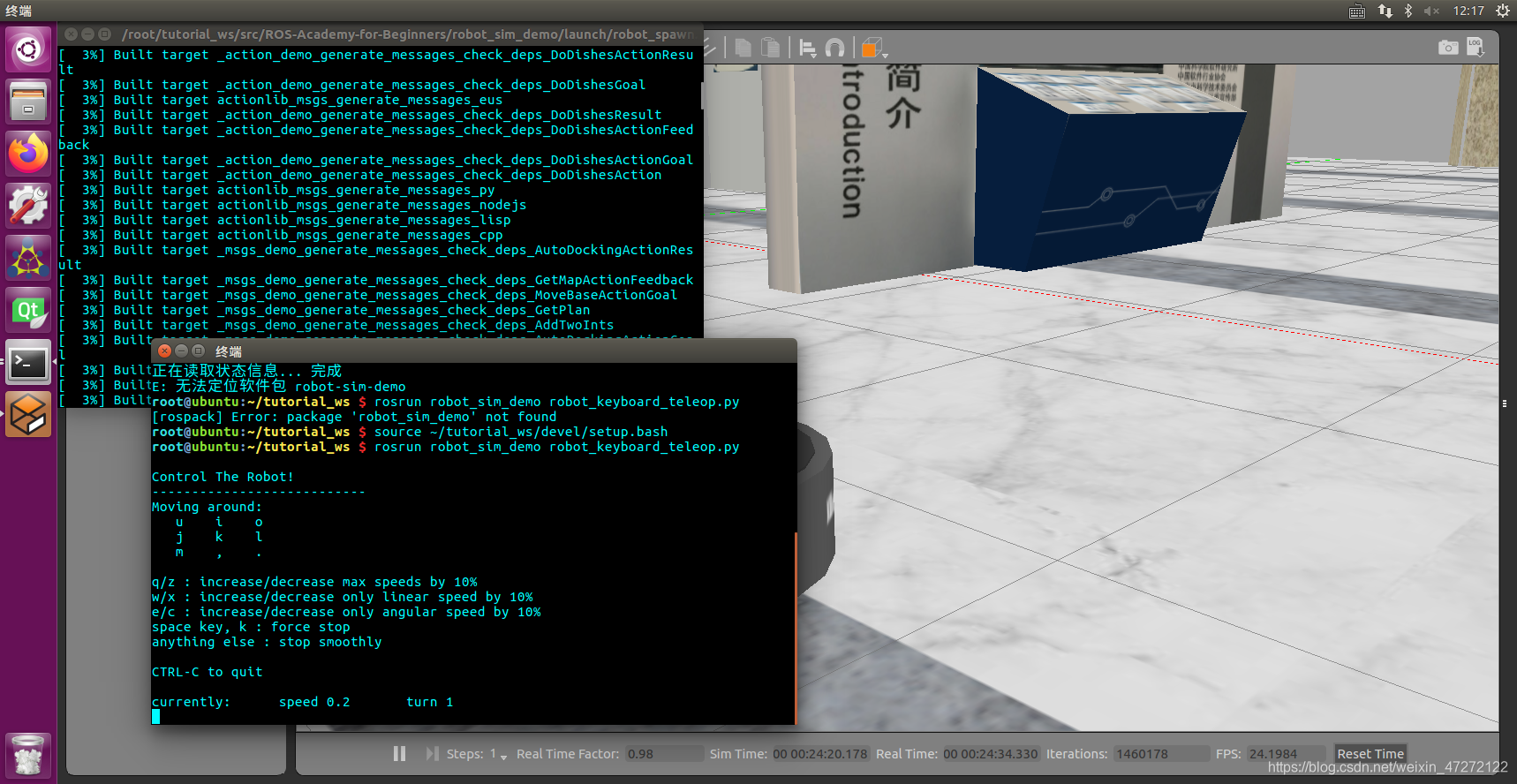
再打开一个新的终端,输入以下命令,用键盘控制机器人移动
$ rosrun robot_sim_demo robot_keyboard_teleop.py
这时发现报错
显示Error: package ‘robot_sim_demo’ not found的错误
我以为是缺少robot_sim_demo安装包,发现不是这样,还是报错如下

正确操作:
- 再打开一个新的终端,输入以下命令$ cd ~/tutorial_ws(定位到该工作空间)
- $ source ~/tutorial_ws/devel/setup.bash #刷新环境 (这一步至关重要!!!就是因为你没刷新环境啊,功能包的名字是tutorial_ws,不是你默认设置的catkin_ws)
- $ rosrun robot_sim_demo robot_keyboard_teleop.py(至此,按下i、j、l等按键,这样你就可以通过键盘来控制机器人的移动了)
HAPPY ENDING!


















 1822
1822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









