







 本文汇总了一系列关于旋转目标检测的开源项目及论文资源,包括基于YOLO的不同版本实现、MMDetection扩展项目MMRotate等,并提供了目标检测领域的论文集及代码集合。
本文汇总了一系列关于旋转目标检测的开源项目及论文资源,包括基于YOLO的不同版本实现、MMDetection扩展项目MMRotate等,并提供了目标检测领域的论文集及代码集合。
下文的格式就是:网址+内容介绍,比较个人向,自己想做小目标的旋转目标检测。那让我们开始吧!
https://github.com/iscyy/yoloair

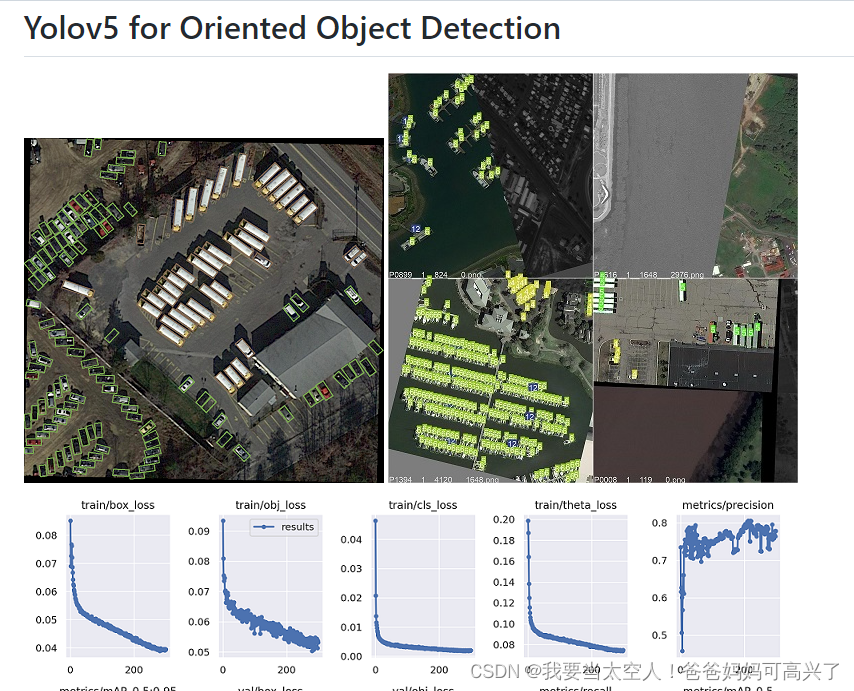
https://github.com/hukaixuan19970627/yolov5_obb
https://github.com/open-mmlab/mmrotate
下面这个是yyds!基本你想到的方法都有了,同时也在持续更新!
https://github.com/hoya012/deep_learning_object_detection
目标检测的论文集,按照时间顺序总结,截止至2020年全部
https://github.com/amusi/awesome-object-detection
目标检测的代码全集,按照时间顺序总结,各种经典的和不经典的都有。但也只是到2019年之前.
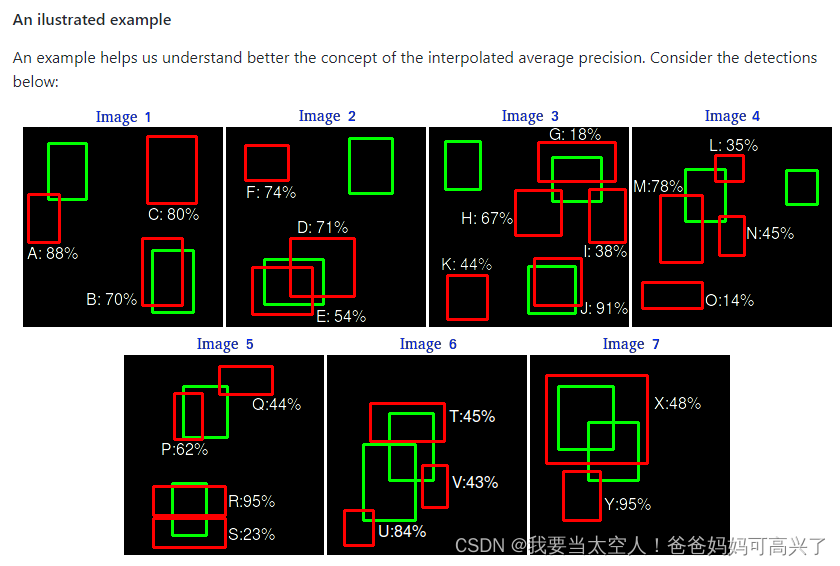
用来评价模型的预测结果的!Evaluate!
比如:
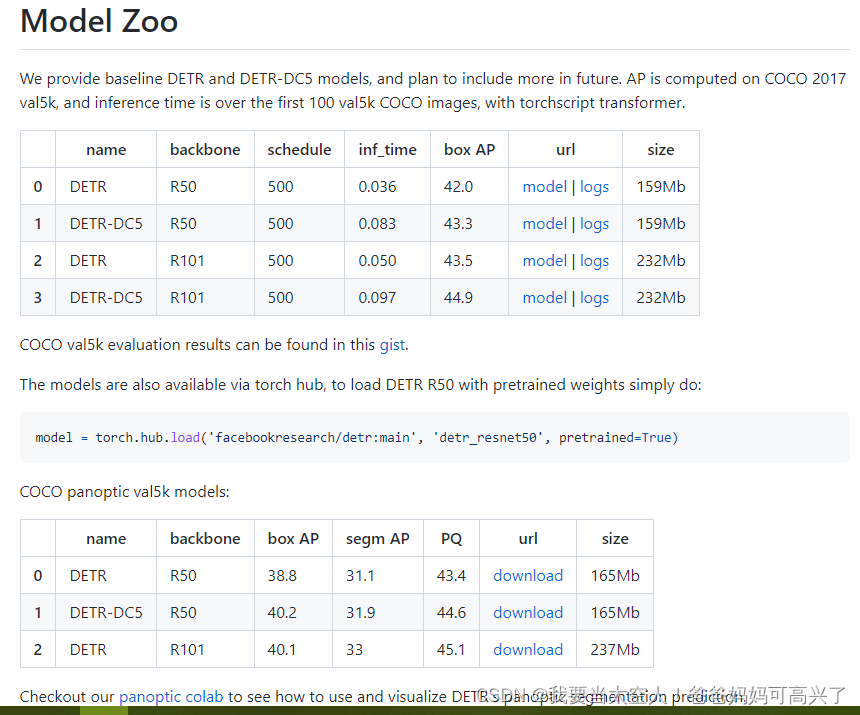
https://github.com/facebookresearch/detr
DETR
https://github.com/sgrvinod/a-PyTorch-Tutorial-to-Object-Detection
基础知识讲解,也可以跑通代码。
https://github.com/Paperspace/DataAugmentationForObjectDetection
数据增强的代码(旋转缩放对称)
https://github.com/kuanhungchen/awesome-tiny-object-detection
!!!小目标检测终于来了!!!!!!!!!!!!!但这个是论文集,不是代码集或者包
https://github.com/huggingface/transformers/blob/main/README_zh-hans.md
大名鼎鼎的Transformer,这个包可以调用Deformable DETR
https://github.com/ZhangGongjie/SAM-DETR
https://github.com/fundamentalvision/Deformable-DETR
上面两个DETR的变种都对CUDA和GCC有要求。所以不是很能跑通。
 这些是DETR的搜索结果
这些是DETR的搜索结果
这些是旋转目标检测的搜索结果
https://github.com/lee-gwang/yolov7_obb
https://github.com/SSTato/YOLOv7_obb
这两个都是yolov7旋转目标检测

















 818
818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









