






0. 论文信息
标题:ROLO-SLAM: Rotation-Optimized LiDAR-Only SLAM in Uneven Terrain with Ground Vehicle
作者:Yinchuan Wang, Bin Ren, Xiang Zhang, Pengyu Wang, Chaoqun Wang, Rui Song, Yibin Li, Max Q.-H. Meng
机构:Shandong University、Southern University of Science and Technology
原文链接:https://arxiv.org/abs/2501.02166
代码链接:https://github.com/sdwyc/rolo
1. 导读
基于激光雷达的SLAM被认为是在恶劣环境中提供定位指导的一种有效方法。然而,当经过不平坦的地形时,现有的基于激光雷达的SLAM方法遭受显著的姿态估计漂移,特别是与垂直方向相关的分量。这种缺陷通常会导致明显扭曲的全球地图。本文提出了一种基于激光雷达的SLAM方法来提高粗糙地形中地面车辆的姿态估计精度,称为旋转优化的仅激光雷达(ROLO) SLAM。该方法利用前向位置预测来粗略地消除连续扫描的位置差异,从而能够在前端单独和精确地确定位置和方向。此外,我们采用了一个并行的空间体素化的对应匹配。我们在每一个体素内发展了一个球面对准引导的旋转配准来估计车辆的旋转。通过引入几何对准,我们将运动约束引入到优化公式中,以增强对激光雷达平移的快速有效估计。随后,我们提取几个关键帧来构建子地图,并利用从当前扫描到子地图的对准来进行精确的姿态估计。同时,建立了一个全局尺度的因子图来帮助减少累积误差。在不同的场景中,进行了不同的实验来评估我们的方法。结果表明,ROLO-SLAM在地面车辆姿态估计方面表现出色,并优于现有的最新激光雷达SLAM框架。
2. 效果展示
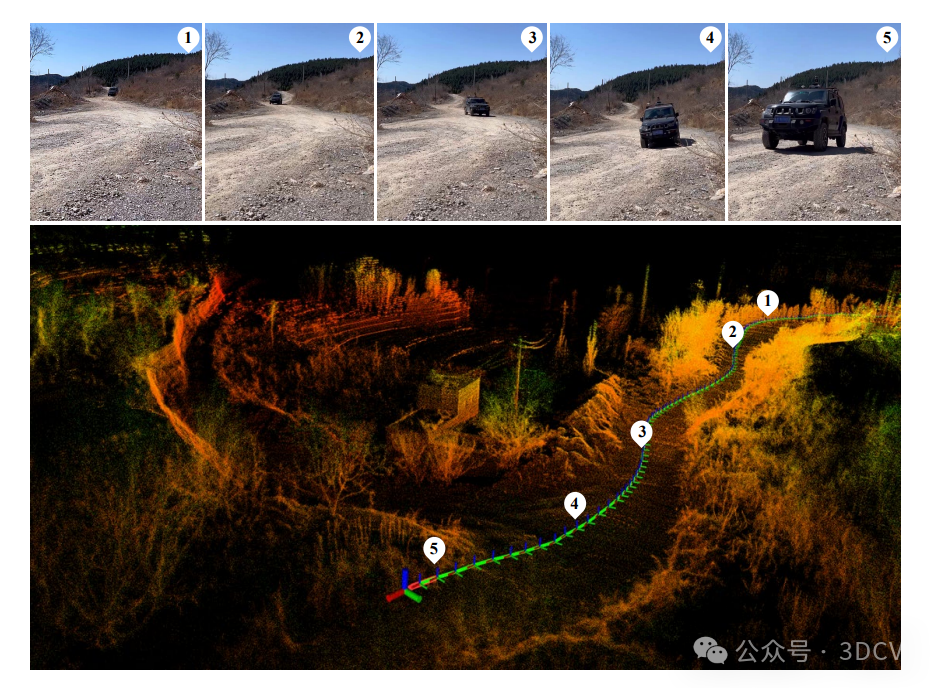
上图显示了一辆在越野场景中行驶的真实车辆。下图显示了点云图和ROLO-SLAM输出的轨迹。
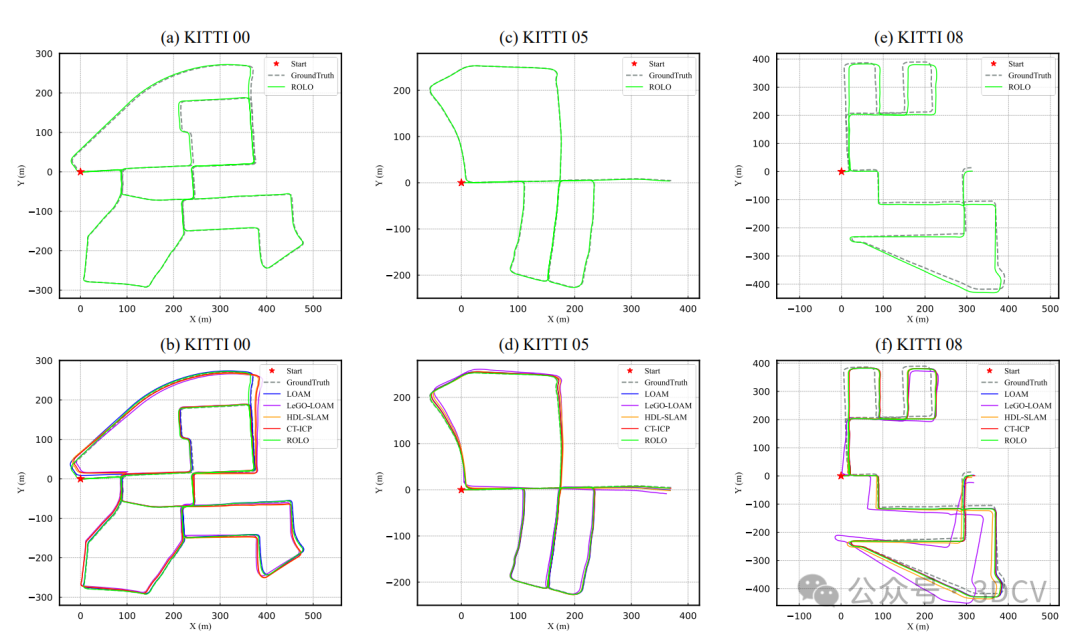
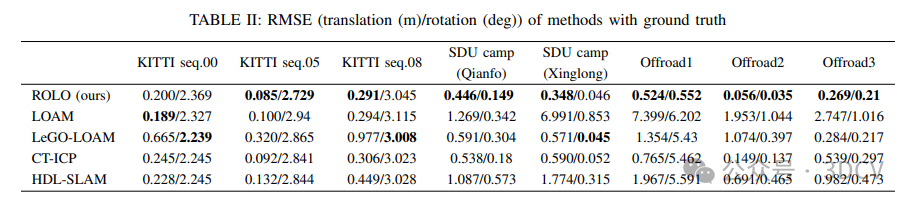
KITTI数据集定位精度:
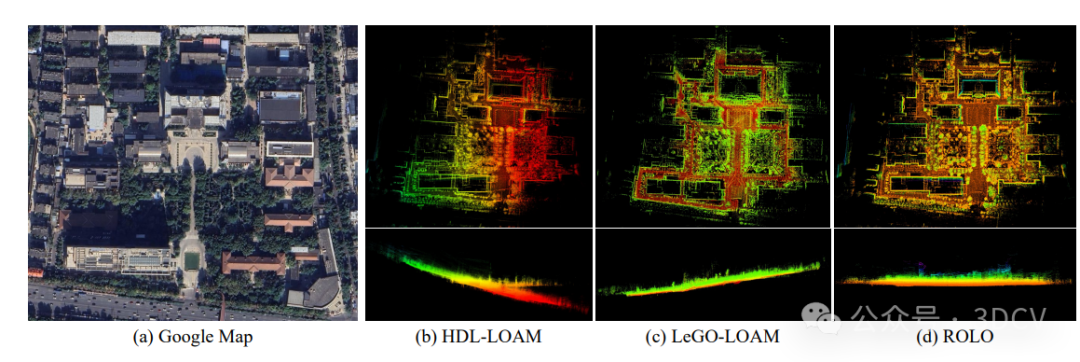
不同SLAM建图结果对比
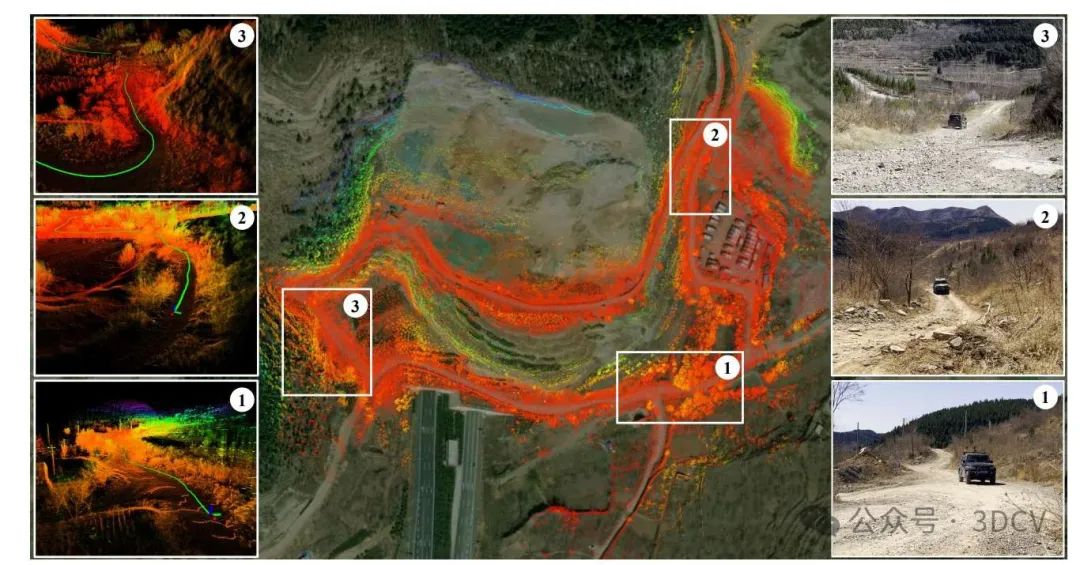
点云图与 0froad3 数据集的卫星图对齐。在不同的驾驶场景中拍摄了三张快照,并按顶号顺序排列。
3. 方法
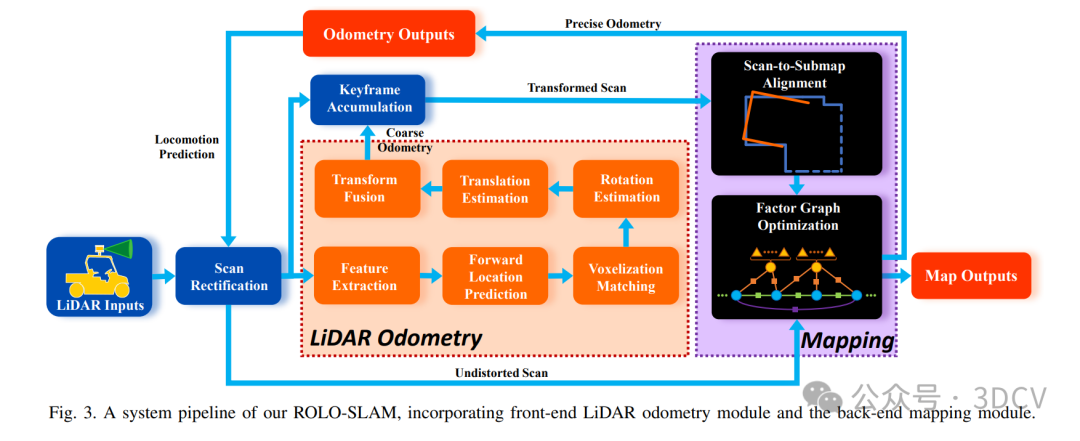
ROLO-SLAM的架构如图3所示。所开发的框架由两个部分组成:前端激光雷达里程计模块和后端建图模块。首先,利用后端提供的里程计数据对激光雷达扫描数据进行校正,以修正运动畸变。在前端,基于通过平滑度度量识别的边缘和平面特征来提取几何特征。随后,开发前向位置预测功能,以快速初步估计激光雷达的平移量,这有助于实现旋转和平移的松耦合。利用所开发的体素化方法确定对应关系。旋转和平移是独立确定的,其中旋转通过球面配准模型进行配准,而平移则是基于连续时间优化获得的。此外,后端通过聚合关键帧来构建子图,并利用这些子图进行扫描到子图的配准,进一步使用因子图优化激光雷达的全局位姿和点云地图。
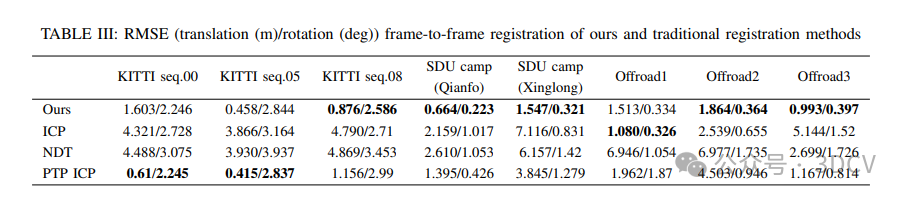
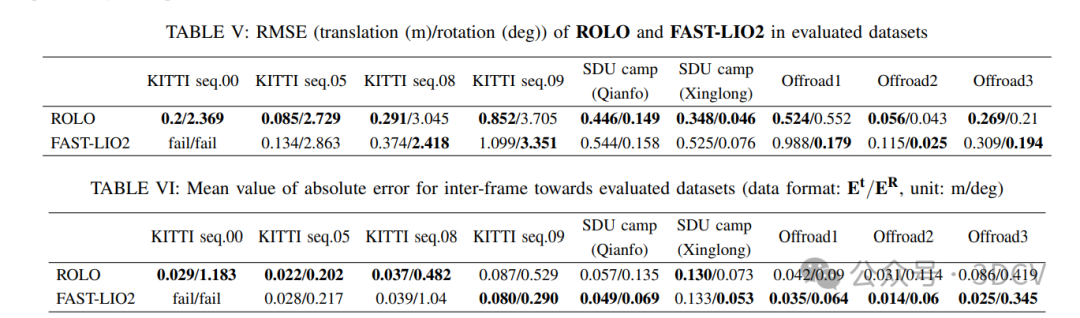
4. 实验结果
5. 总结 & 未来工作
在本文中,我们提出ROLO-SLAM以获得在不平坦地形中的精确位姿估计和环境地图。为了减轻地面车辆行驶过程中的垂直漂移,我们基于前向位置预测中的粗略平移量独立估计旋转和平移。在后端,我们利用扫描到子图的配准和因子图来提高最终位姿估计的准确性。实验结果表明,我们的方法与最先进的方法相比表现更佳。此外,我们还对各种场景进行了建图评估,以验证ROLO-SLAM的建图质量。建图结果表明,我们的方法能够在城市和越野场景中生成高精度的点云地图。与最先进的方法相比,我们的方法输出的点云地图与真实场景的相似度最高,这也反映出我们的方法能够输出精确的位姿估计。
在未来的工作中,我们将研究在不满足中心对齐条件的情况下的旋转和平移解耦,以减少对前向位置预测的依赖。此外,我们还将关注由动态和瞬时地面波动引起的姿态突变。可能会将从有限观测中提取的未来位姿预测等先验信息融合到框架中,以提高姿态估计的准确性。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









