







目录

相关资料
视频链接:https://www.bilibili.com/video/BV1JA411c7VT
原视频链接:https://speech.ee.ntu.edu.tw/~hylee/ml/2021-spring.html
Leeml-notes开源项目:https://github.com/datawhalechina/leeml-notes
1、优化失败原因 Optimization Fails
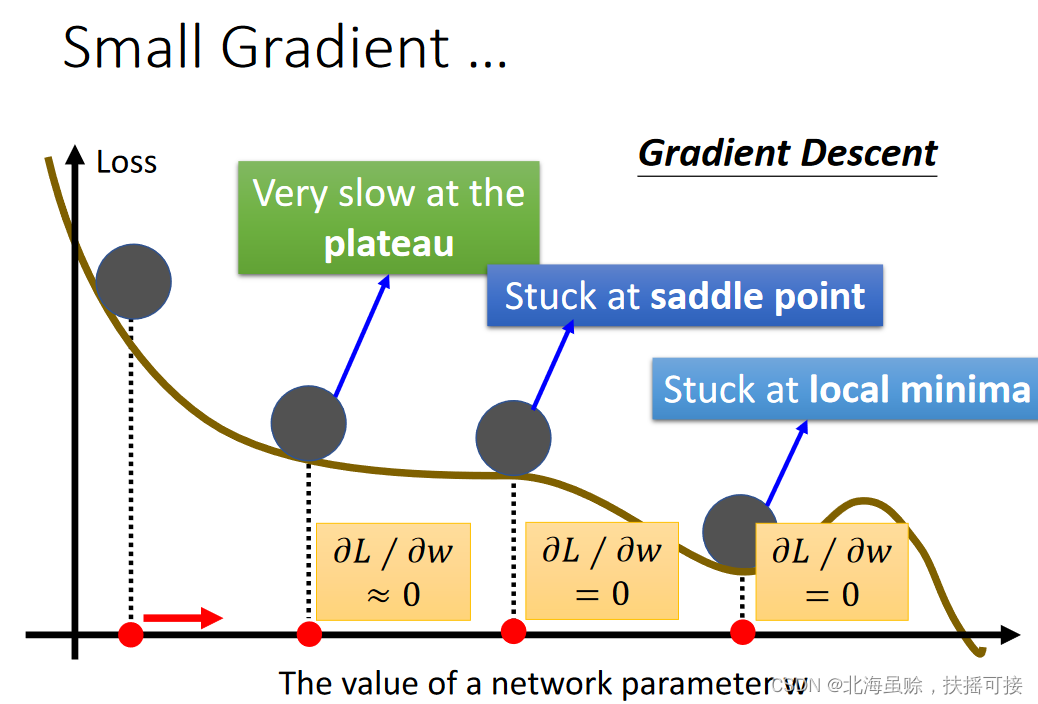
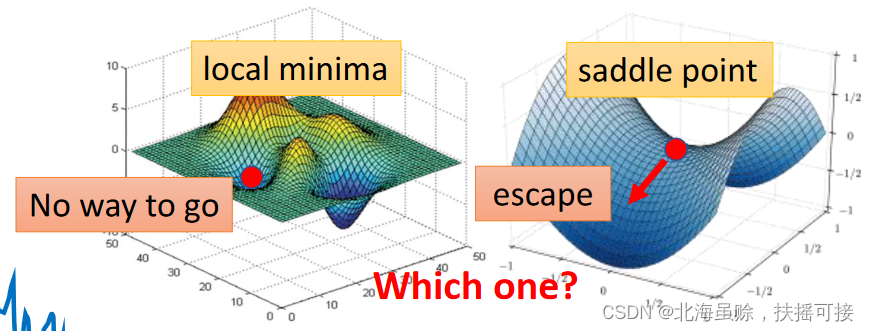
1.1、critical point
gradient is zero,梯度为0的点,称为critical point。包含两类,local minima,saddle point,如下:
1.2、数学解释
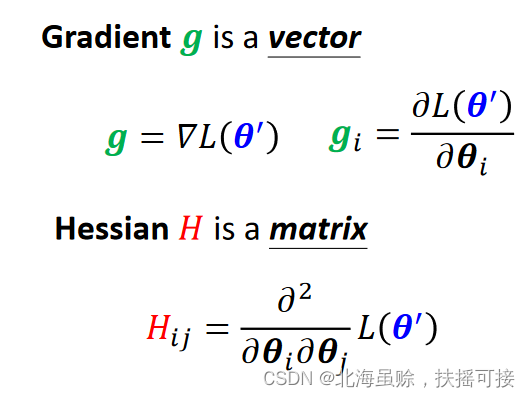
采用多元函数泰勒展开,𝐿(𝜽)在𝜽 = 𝜽′处展开如下:
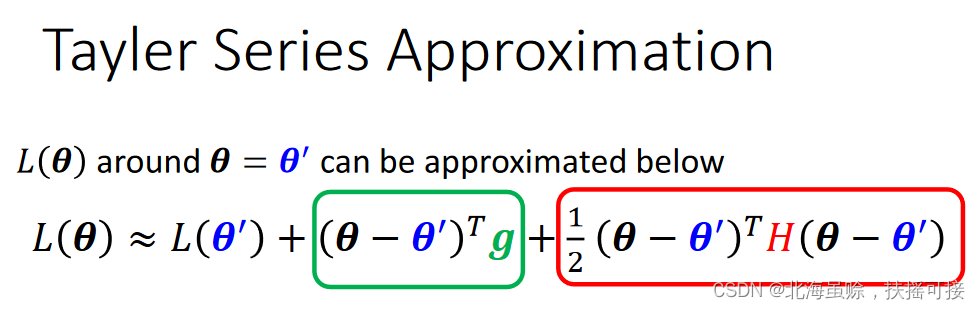
g为函数梯度,为一个向量;H为函数的海森矩阵,表示对不同参数的二阶矩阵:
在critical point处,梯度g=0,简化如下:

Critical Point类型有三类,minima,maxima,Saddle point,依靠
𝒗
𝑇
𝐻
𝒗
𝒗^𝑇𝐻𝒗
vTHv大小判断:
𝒗
𝑇
𝐻
𝒗
𝒗^𝑇𝐻𝒗
vTHv>0:𝐿(𝜽)> 𝐿(𝜽′),minima
𝒗
𝑇
𝐻
𝒗
𝒗^𝑇𝐻𝒗
vTHv<0:𝐿(𝜽)< 𝐿(𝜽′),maxima
𝒗
𝑇
𝐻
𝒗
𝒗^𝑇𝐻𝒗
vTHv>0 及 <0:Saddle point
也可以通过H的特征值正负性判断三类特殊点。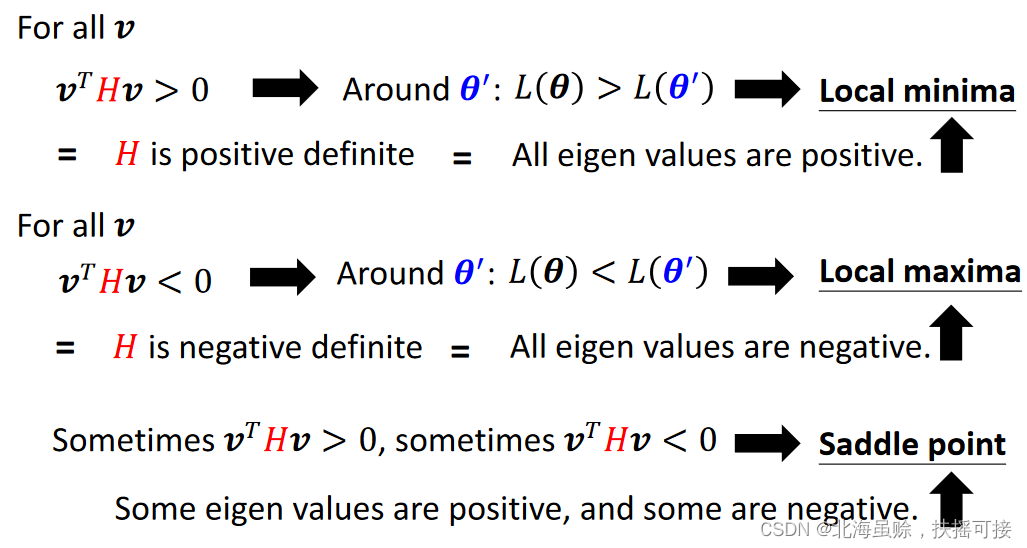 举例:
𝑦
=
𝑤
1
𝑤
2
𝑥
𝑦 = 𝑤_1𝑤_2𝑥
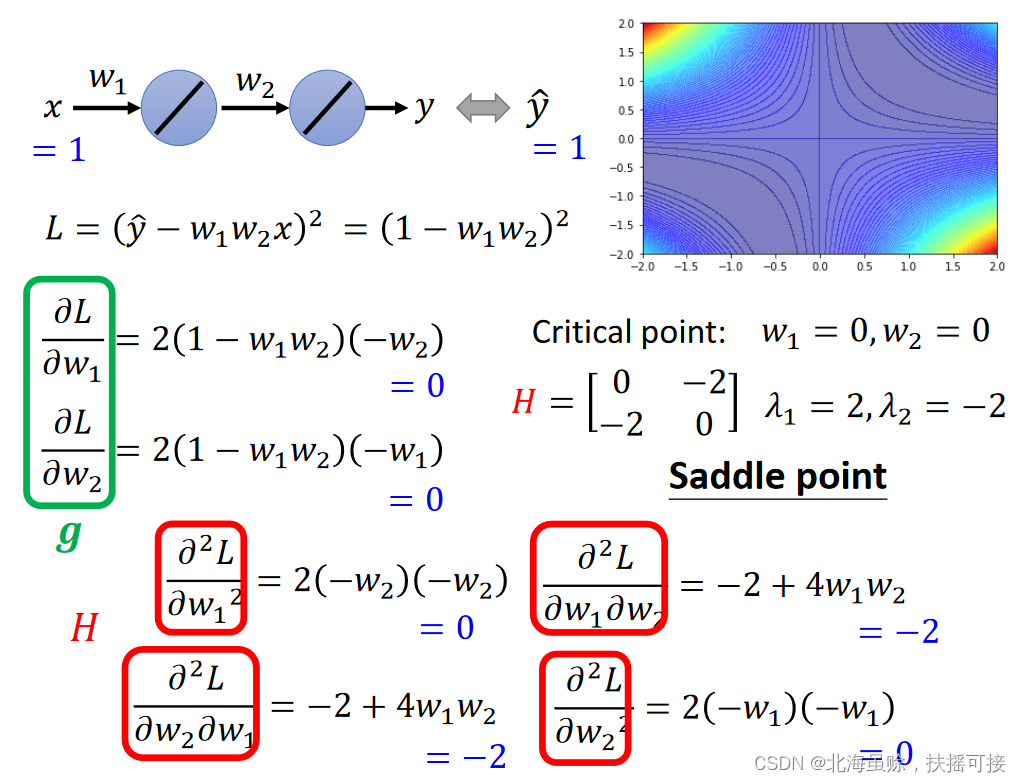
y=w1w2x, 数据(1,1)
举例:
𝑦
=
𝑤
1
𝑤
2
𝑥
𝑦 = 𝑤_1𝑤_2𝑥
y=w1w2x, 数据(1,1)
损失函数:
𝐿
=
(
𝑦
^
−
𝑤
1
𝑤
2
𝑥
)
2
=
(
1
−
𝑤
1
𝑤
2
)
2
𝐿= (\hat𝑦 − 𝑤_1𝑤_2𝑥)^2 = (1- 𝑤_1𝑤_2)^2
L=(y^−w1w2x)2=(1−w1w2)2;
计算g与H如下:
1.3、鞍点处理
依靠海森矩阵H确定鞍点优化方向,𝐻 may tell us parameter update direction。数学的假设推理如下:
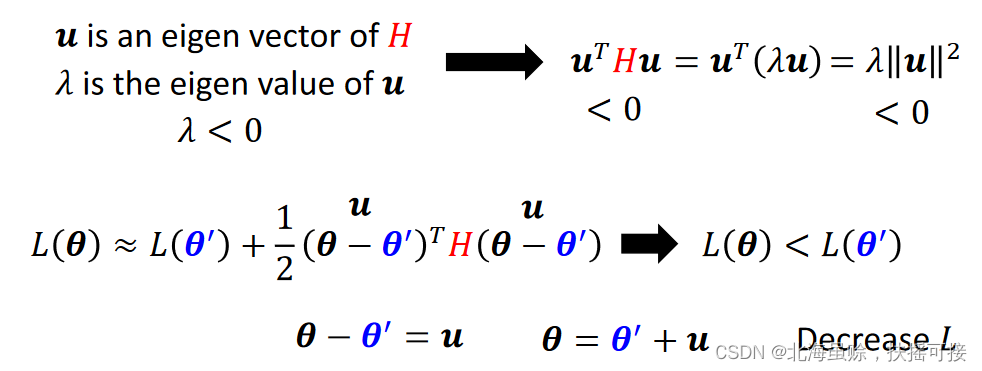
寻找海森矩阵H的一个负的特征向量u,即为L下降方向。
举例:
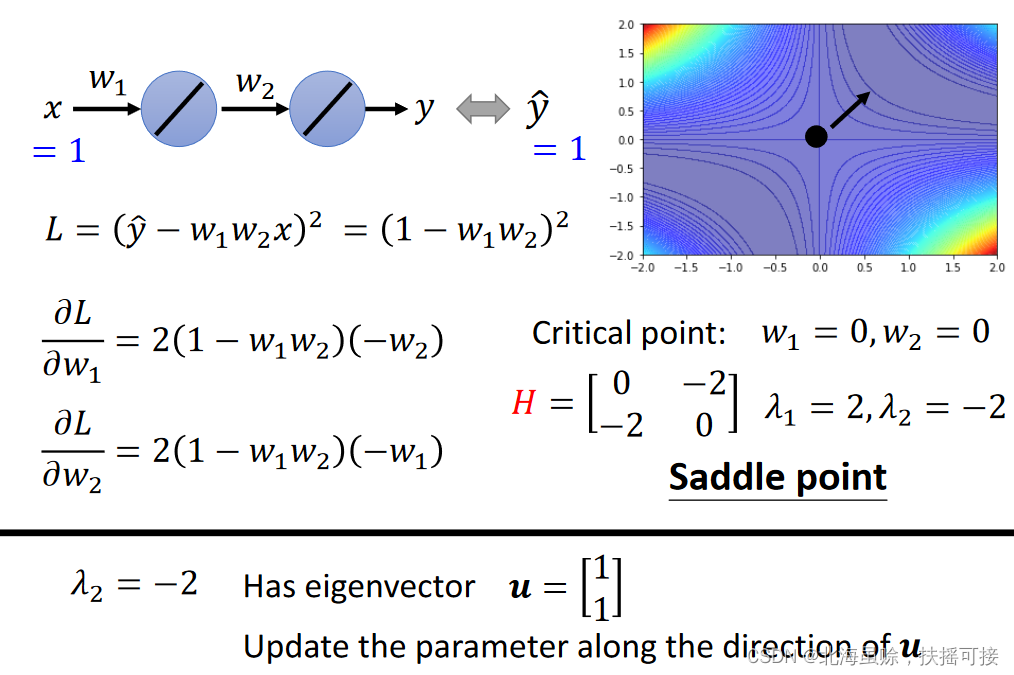
上述函数,找到鞍点并且寻找下降方向:
- 在(0,0),海森矩阵H特征值2,-2。有正负,判断(0,0)为鞍点。
- 选取海森矩阵H特征值-2对应的一个特征向量𝒖 = [1, 1],即为更新方向。
但是,因为计算量比较大,上述方法比较少用。
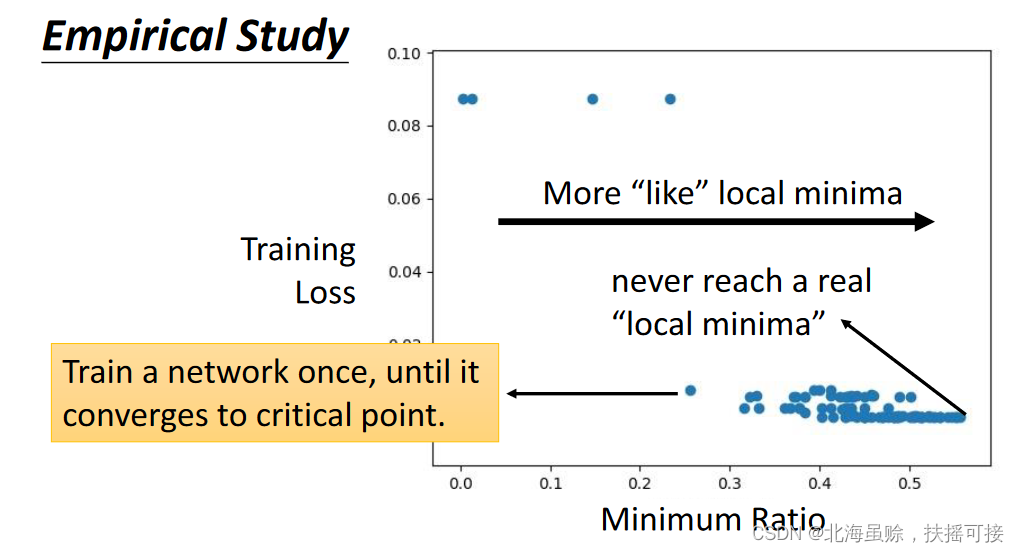
1.4、临界点数量比例
M
i
n
i
m
u
m
r
a
t
i
o
=
N
u
m
b
e
r
o
f
P
o
s
i
t
i
v
e
E
i
g
e
n
v
a
l
u
e
s
N
u
m
b
e
r
o
f
E
i
g
e
n
v
a
l
u
e
s
Minimum ratio = \frac {Number \; of \; Positive \; Eigen \;values} {Number\; of \;Eigen \;values}
Minimumratio=NumberofEigenvaluesNumberofPositiveEigenvalues
上图中,通过实证研究,大部分的critical point为鞍点,local minima很少(横坐标1处,为绝对minima)。
2、Batch and Momentum
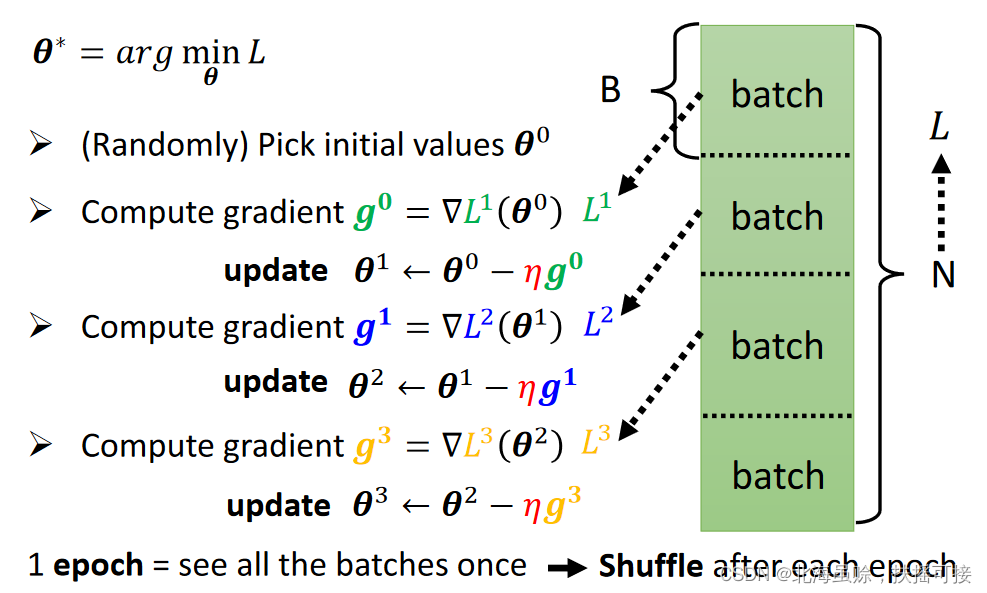
2.1、Batch 批次
一个训练epoch分为数个batch,每一个batch均可以对损失函数参数
θ
\theta
θ进行更新。每个epoch的batch均会重新分配。
2.2、Small Batch v.s. Large Batch
2.2.1、计算速度
采用GPU并行计算,小批次和大批次在一定范围内耗时基本一致:
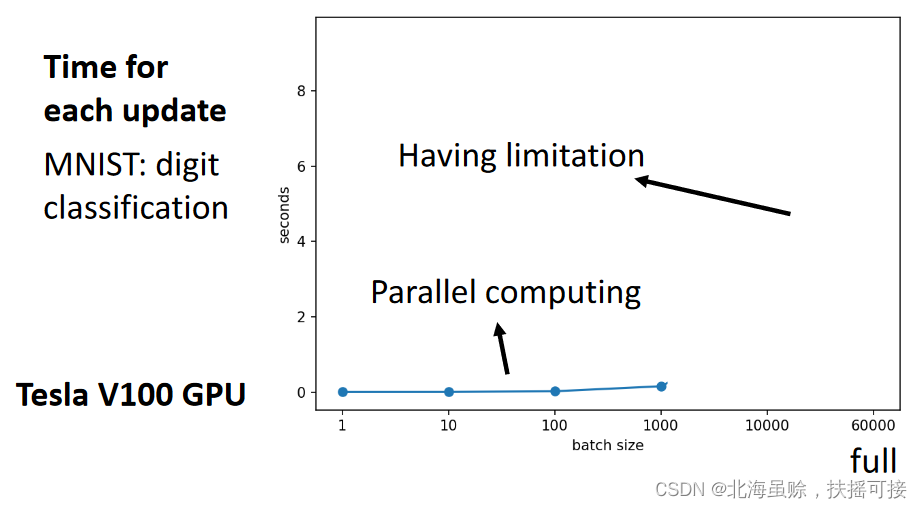
但是不同batch之间转换需要更多时间,所以小批次epoch内需要时间更长:

2.2.2、训练优化效果
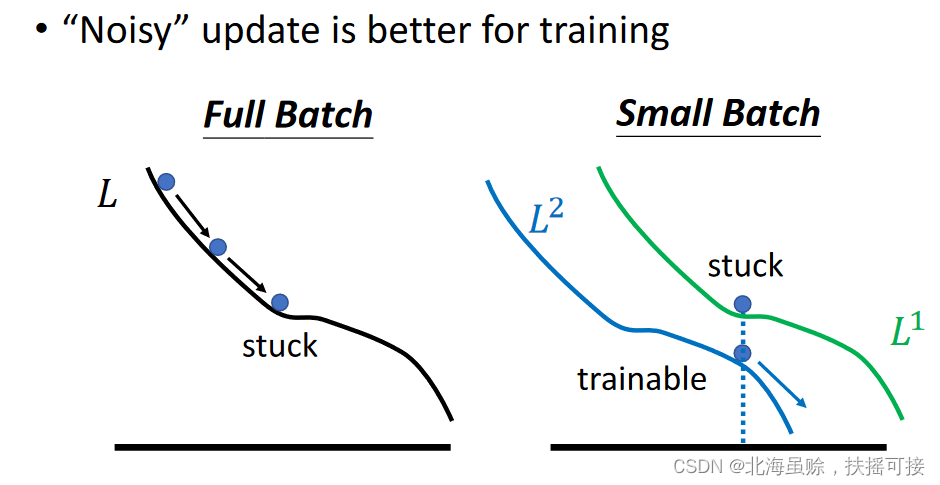
大批次训练,容易导致优化错误(Optimization Fails);小批次训练性能更好:
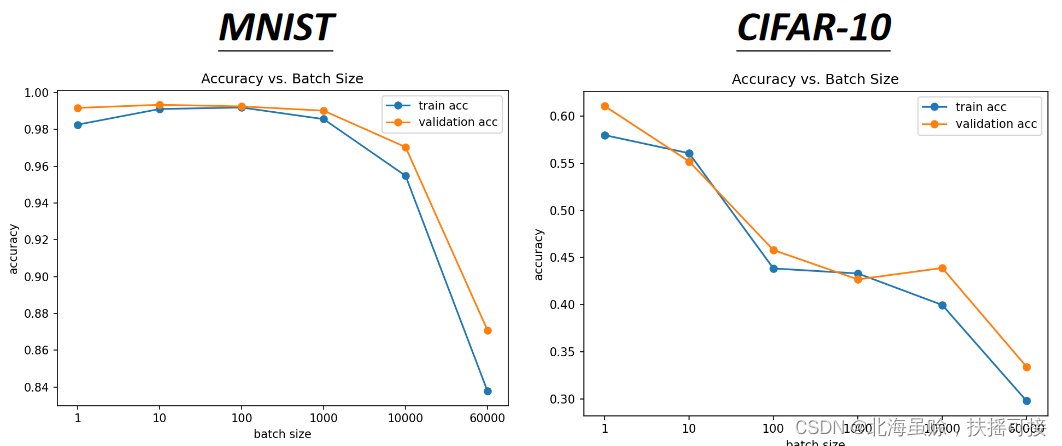
原因:大批次参数更新次数少,容错率低;小批次参数更新的次数多,可以有更多可能跳出local minima。
2.2.3、测试检测效果
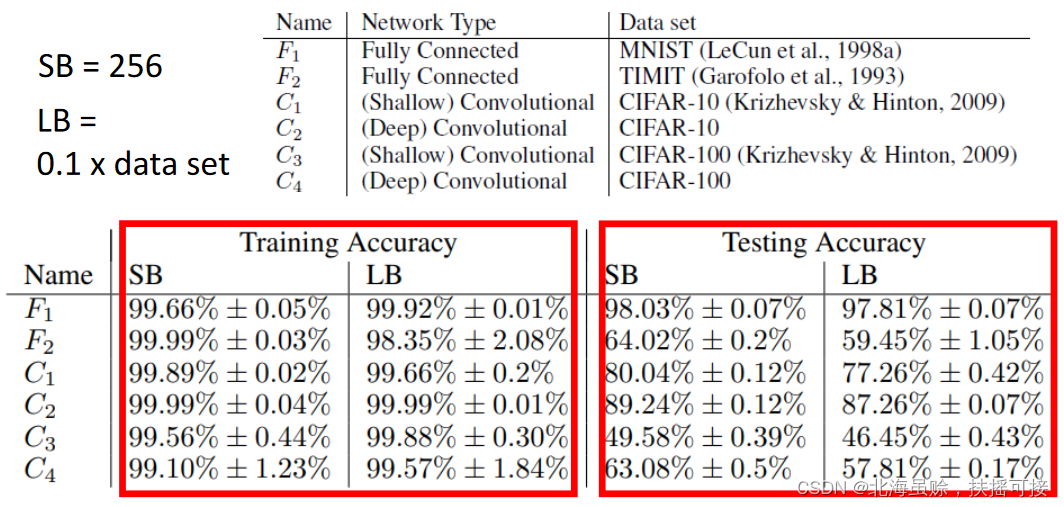
小批量测试数据要好,实验结果如下:SB表示小批次,LB表示大批次。
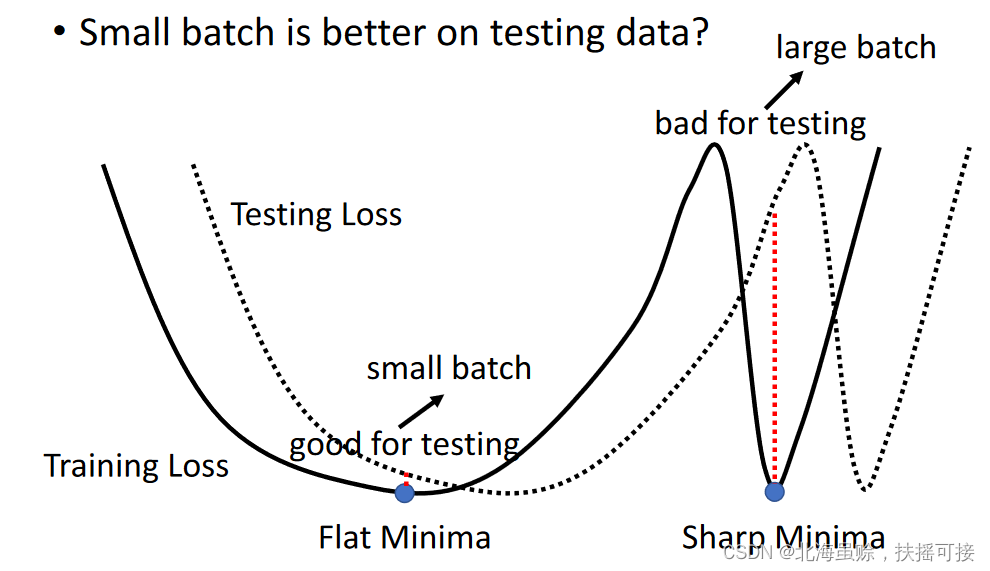
原因仍然是参数更新的问题,train与test的损失函数,认为有一定平移;小批次更容易陷入Sharp Minima,无法更新:
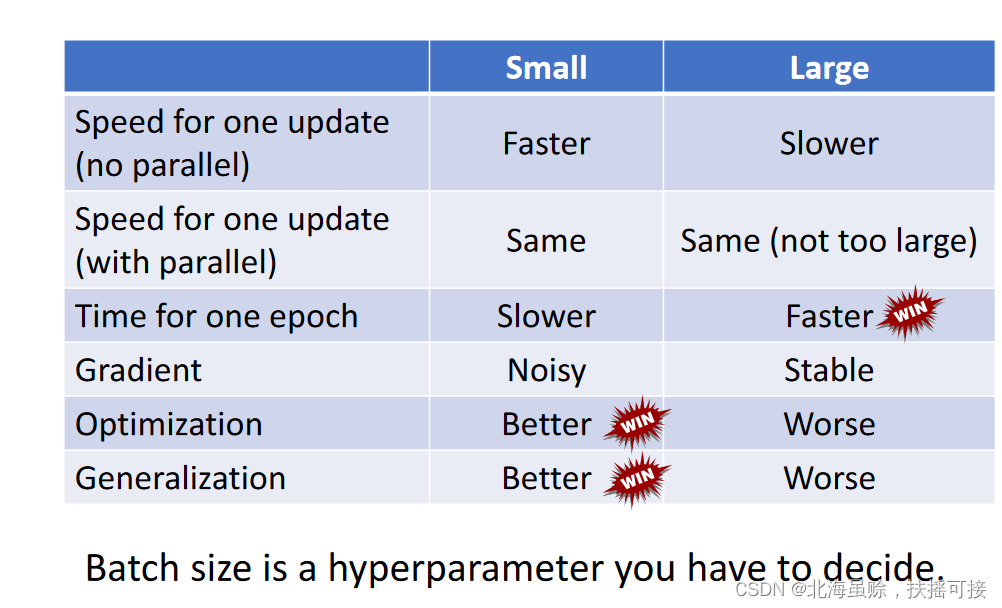
2.2.4、综合比对
2.3、Momentum
Momentum:学习率动量,在更新参数时,不仅考虑函数的梯度,也考虑之前更新的各个梯度方向:
𝒎
t
=
λ
𝒎
t
−
1
−
η
𝒈
t
−
1
𝒎^t = \lambda 𝒎^{t-1} − \eta 𝒈^{t-1}
mt=λmt−1−ηgt−1
综合考虑梯度下降和学习率动量,参数更新如下: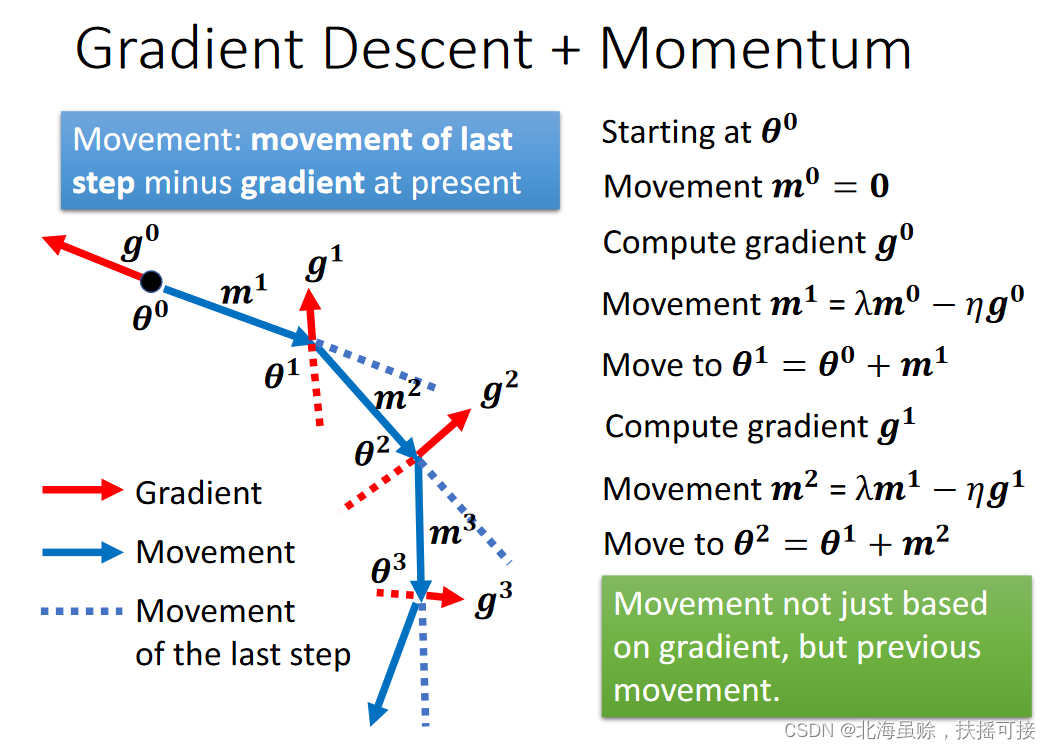
在计算中,可以发现,动量
m
i
m^i
mi包含
g
0
g^0
g0到
g
i
g^i
gi的各个权重之和;
𝒎
i
=
−
(
λ
i
−
1
η
g
0
+
λ
i
−
2
η
2
g
1
+
.
.
.
+
λ
η
i
−
1
g
i
−
2
)
−
η
g
i
−
1
𝒎^i = -(\lambda^{i-1} \eta g^0 + \lambda^{i-2} \eta^2 g^1+...+\lambda \eta^{i-1} g^{i-2})-\eta g^{i-1}
mi=−(λi−1ηg0+λi−2η2g1+...+ληi−1gi−2)−ηgi−1
3、结论
- 临界点Critical points出梯度为0。
- 临界点可以是鞍点和局部最小值。
可以由海赛矩阵H决定。
可以沿着海赛矩阵的特征向量的方向逃脱鞍点。
局部最小值可能是罕见的。 - 小批量和动量更新有助于逃脱临界点。

















 1857
1857

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









