







Lecture 03 Transformation
一、2D transformations
(一)、Representing transformations using matrices
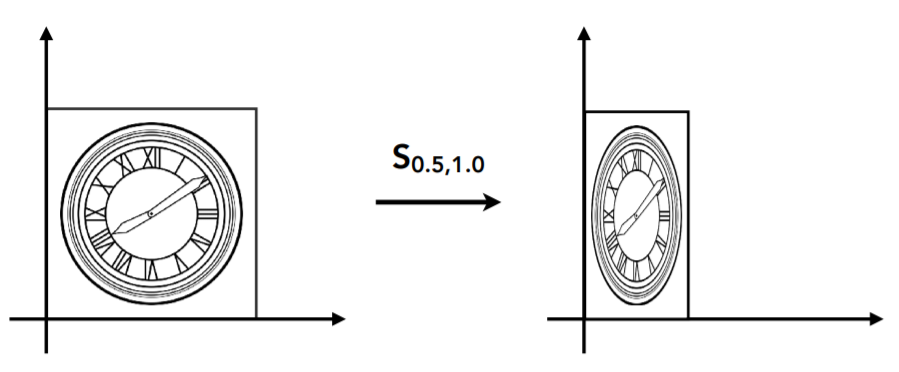
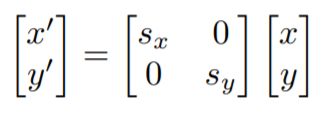
1、Scale (Non-Uniform) Matrix
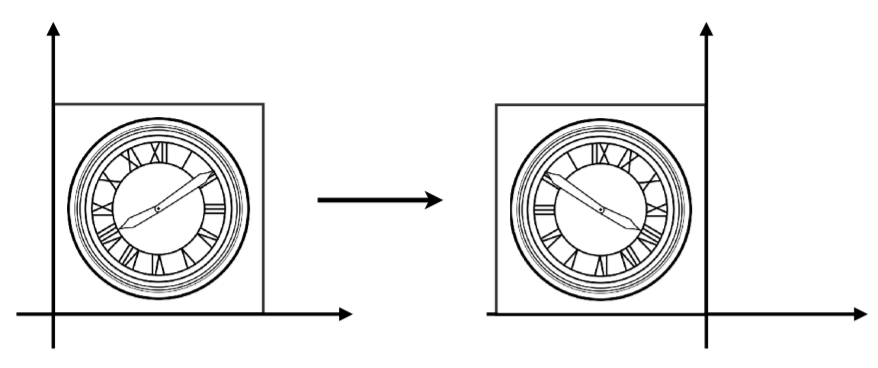
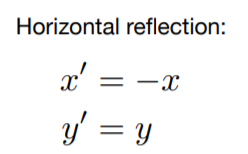
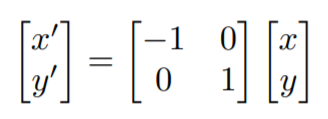
2、Reflection Matrix
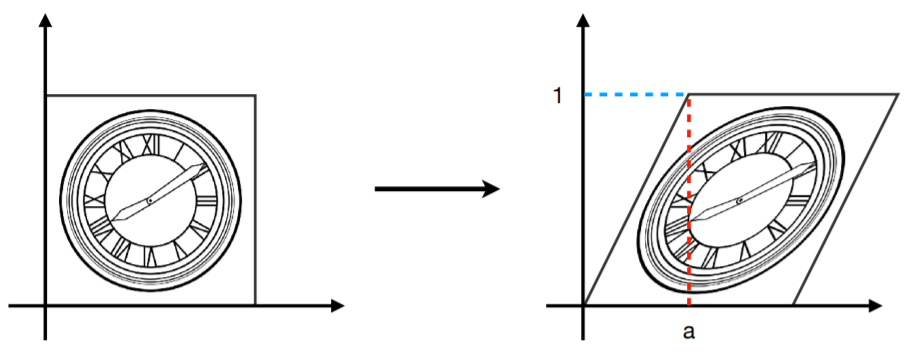
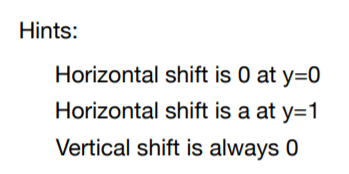
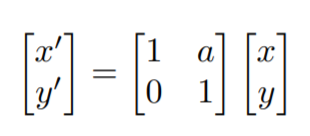
3、Shear Matrix
4、Rotation Matrix
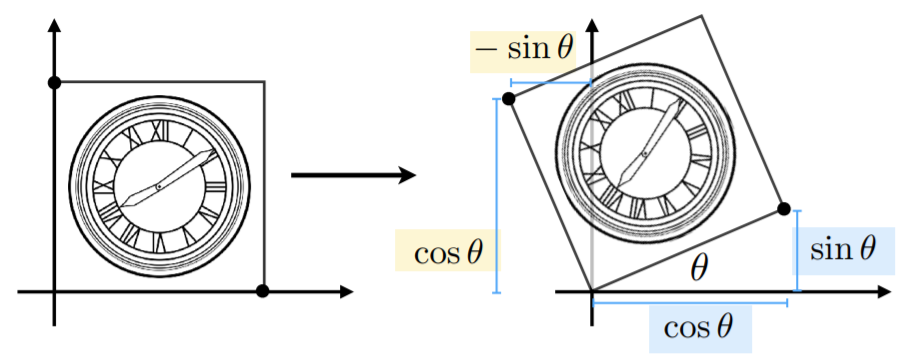
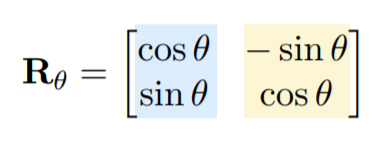
旋转矩阵的推导过程:
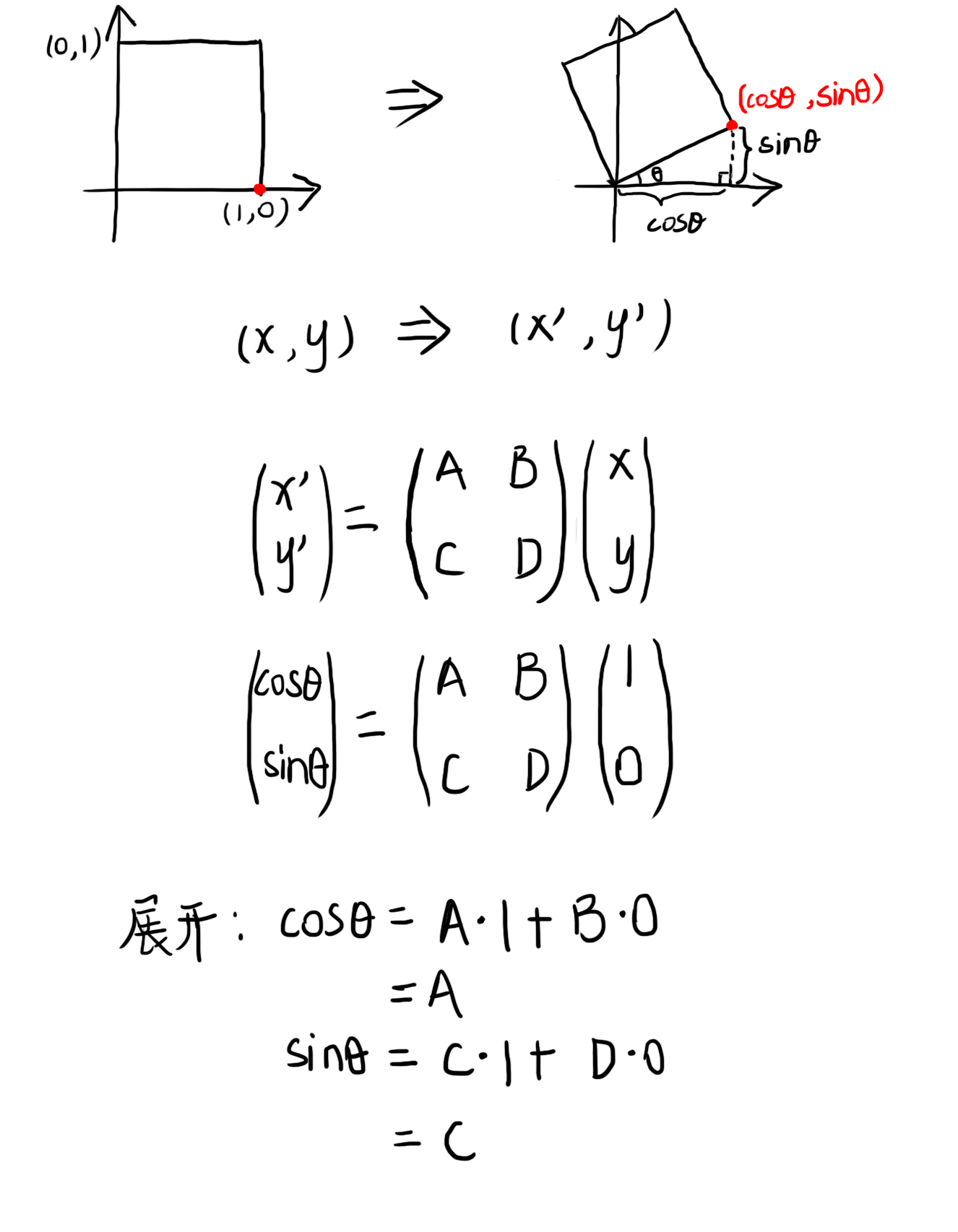
同理,B和D位置的推导选取点(0,1)即可
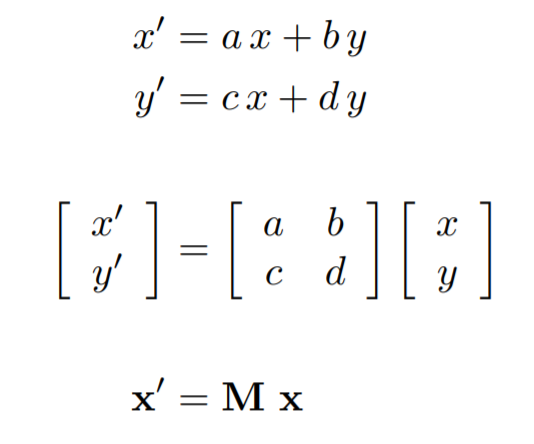
5、Linear Transforms = Matrices
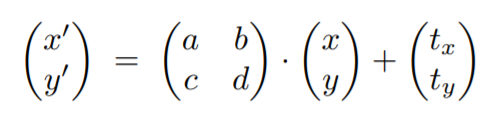
以上的几种变换均属于线性变换,都可以用下列的公式表示
但是一旦涉及到移动,就无法通过上述的公式来实现了。
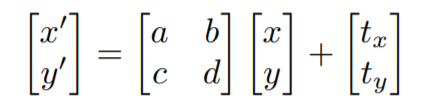
So, translation is NOT linear transform(因此我们可以看到,位移不属于线性变换)
- Translation cannot be represented in matrix form
- But we don’t want translation to be a special case
- Is there a unified way to represent all transformations? (and what’s the cost?)
如何将位移与前面提到的旋转、缩放等线性变换作一个统一?
我们引入了齐次坐标(下文)
(二)、Homogeneous coordinates
1、General Introduction
Add a third coordinate (w-coordinate)
我们通过在二维中引入第三个坐标w,将维度升高到三维,但是依然表示的是二维坐标。
- 2D point = (x, y, 1) T
- 2D vector = (x, y, 0)T
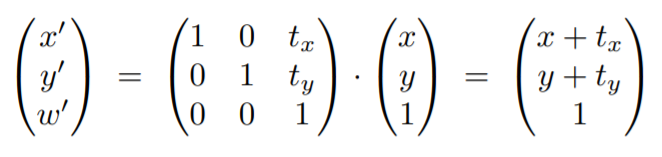
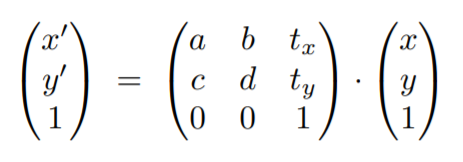
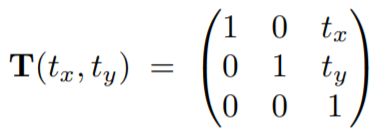
引入齐次坐标后,我们再来看刚刚的位移,我们可以写成下面这个形式,其中tx和ty分别表示沿x轴和y轴的位移值
那么在上面我们为什么要区分2D point和 2D vector?原因如下:
Valid operation if w-coordinate of result is 1 or 0
- vector + vector = vector
- point – point = vector
- point + vector = point
- point + point = midpoint
这样可以满足一般的数学运算规律,例如两个向量相加结果依然为向量,即w=0,两个点相减结果为向量,此时w:1-1=0,点与向量相加(一个点沿着一个方向移动一段距离)结果仍为一个点,即w=1
- In homogeneous coordinates
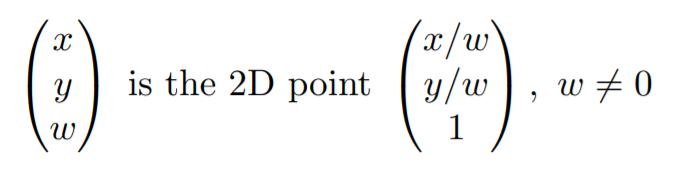
要保持w的值始终为1,只需要将x和y同时除以w即可
2、2D Transformations
Affine map = linear map + translation
Using homogenous coordinates:
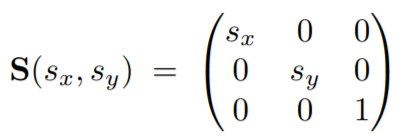
(1)Scale
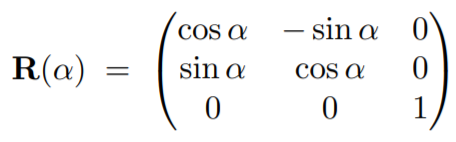
(2)Rotation
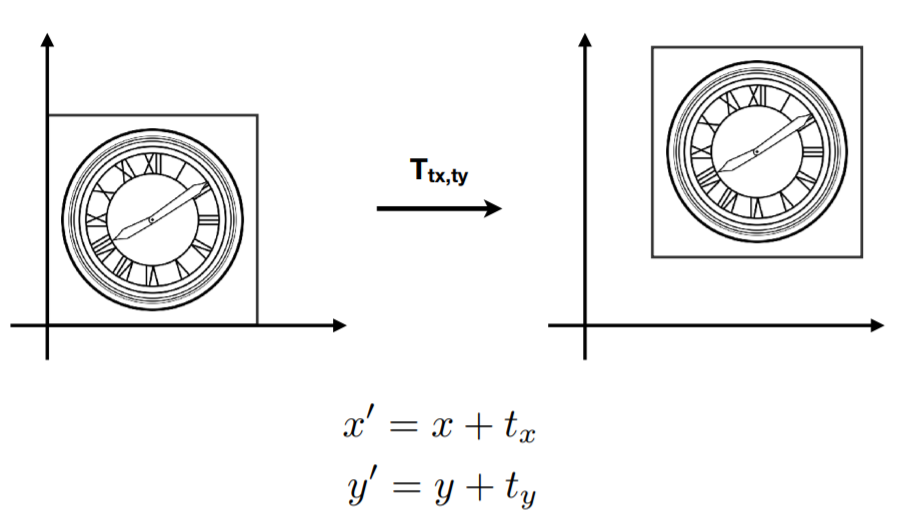
(3)Translation
3、Inverse Transform
M-1 is the inverse of transform in both a matrix and geometric sense
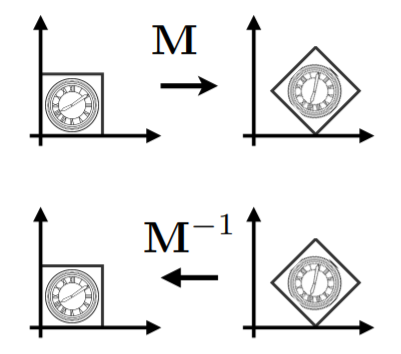
逆变换在数学运算中即为逆矩阵
(三)Composing Transforms
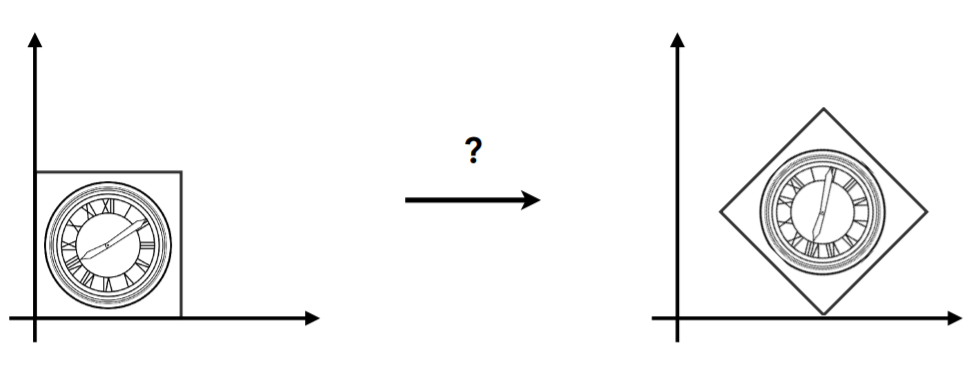
将第一幅图变换到第二幅图有哪几种组合变换的方式呢?
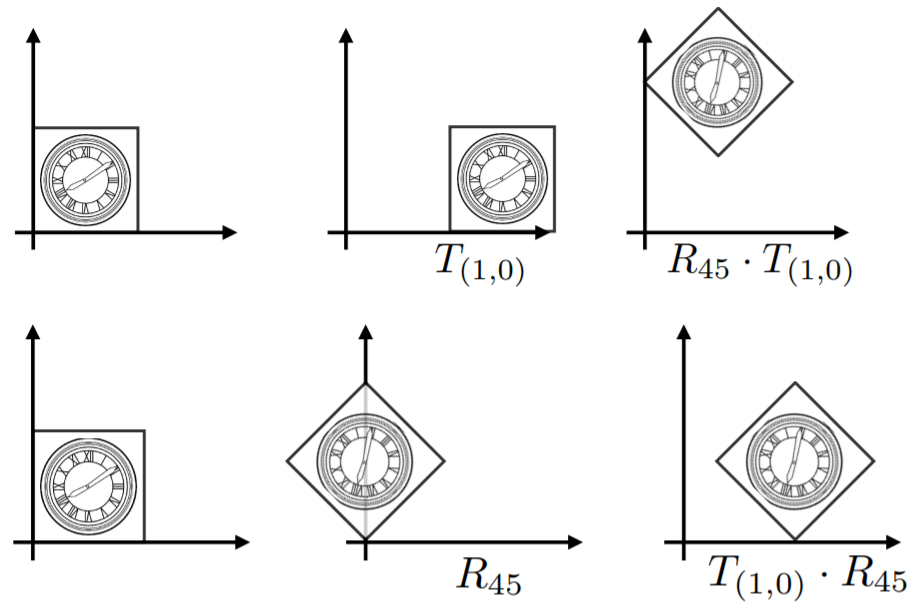
第一种方式是先位移后旋转,显然结果并不是我们想要的,还有一种方式就是先旋转后位移。
通过这个案例我们也可以看出
- Matrix multiplication is not commutative(矩阵乘法是不能交换的)

- Note that matrices are applied right to left(矩阵乘法是从右向左相乘的)

在一个组合变换中,虽然矩阵乘法不满足交换律,但是依然满足结合律
Sequence of affine transforms A1, A2, A3, …
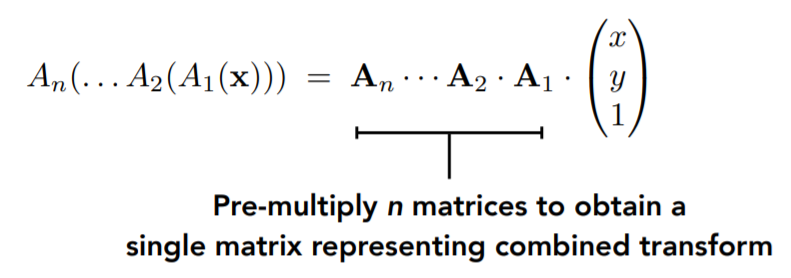
这也就意味着,无论经历了多少次变换,总能把所有变换计算出来写成一个总的变换矩阵

















 2865
2865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









