







目录
引言
分割将图像细分为构成它的子区域或物体。形态学图像处理中,输入的是图像,输出的是从图像中提取出来的属性,分割是该方向上的另一步骤。分割将图像细分为构成它的子区域或物体,细分的程度取决于要解决的问题。
多数分割算法均基于灰度值的两个基本性质之一:不连续性和相似性。对于不连续的灰度,方法是以灰度突变为基础分割一幅图像,比如图像的边缘。对于相似的灰度,主要方法是根据一组预定义的准则把一幅图像分割为相似的区域。阈值处理、区域生长、区域分割和区域聚合都是这类方法的例子。
10.1 基础知识
令R表示一幅图像占据的整个空间区域。我们可以将图像分割视为把R分为n个子区域R1,R2,...,Rn的过程,满足:
- (a)
- (b)
是一个连通集,i=1,2,...,n。
- (c)
空集,对于所有i和j,i≠j。
- (d)
, i=1,2,...,n。
- (e)
,对于任何
的邻接区域。
条件(a)指出,分割必须是完全的;也就是说,每个像素都必须在一个区域内。
条件(b)要求一个区域中的点以某些预定义的方式来连接(即这些点必须是4连接的或8连接的)
条件(c)指出,各个区域必须是不相交的
条件(d)涉及分割后的区域中的像素必须满足的属性——例如,若Ri中的所有像素都有相同的灰度级。则Q(Ri)=TRUE。
条件(e)指出,两个邻接区域Ri和Rj在属性Q的意义上必须是不同的。
10.2 点、线和边缘检测
本节主要介绍以灰度局部剧烈变化检测为基础的分割方法。边缘检测器是设计用来检测边缘像素的局部图像处理方法。一条线可视为一条边缘线段, 该线两侧的背景灰度要么远亮于该线像素的灰度, 要么远暗于该线像素的灰度。
10.2.1 背景知识
对一幅图中灰度的突变,局部变化可以用微分来检测。因为变化短促,可以用一阶微分和二阶微分描述。数字函数的导数可用差分来定义。
对于用于一阶导数的任何近似, 我们要求:
(1)在恒定灰度区域必须为零;
(2)在灰度台阶或斜坡开处必须不为零;
(3)在沿灰度斜坡点处也必须不为零。
类似地, 对于所用的二阶导数的近似, 我们要求:
(1)在恒定灰度区域必须为零;
(2)在灰度台阶或斜坡的开始处和结束处必须不为零;
(3)沿灰度斜坡必须为零。
一维函数f(x)在点x处一阶导数的近似:
当考虑两变量的图像函数f(x,y)时,为了表示的一致性,使用偏微分。此时将处理沿两个空间轴的偏微分。
关于点x的二阶导数:
得出如下结论:
- 一阶导数通常在图像中产生较粗的边缘;
- 二阶导数对精细细节,如细线、孤立点和噪声有较强的相应;
- 二阶导数在灰度斜坡和灰度台阶过渡处会产生双边缘响应;
- 二阶导数的符号可用于确定边缘是从亮到暗还是从暗到亮。
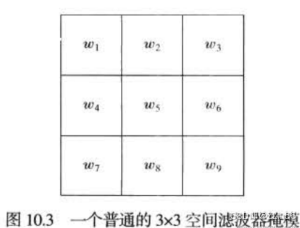
计算图像中每个像素位置处的一阶导数和二阶导数的另一种方法是使用空间滤波器。
对3*3滤波器掩膜来说,导数是计算模板系数与被该模板覆盖的区域中的灰度值的乘积之和。即模板在该区域中心点处的响应如下:
其中是像素的灰度,该像素的空间位置对应于模板中第k个系数的位置。
10.2.2 孤立点的检测
点的检测应以二阶导数为基础。使用拉普拉斯算子:
其中,偏微分由下得:
故拉普拉斯算子是:
如果在某个点处,该模板的响应的绝对值超过了某个指定的阈值,那么我们说在模板中心位置(x,y)处的该点已被检测到。在输出图像汇总,这样的带你被标注为1,而所有其他点则被标注为0,从而产生一幅二值图像。
其中,g是输出图像,T为一个非负阈值。R为上述介绍过的,即模板的系数与其覆盖区域的灰度值的乘积之和,也叫作模板的响应。
当模板的中心位于一个孤立点时,模板的响应最强,而在亮度不变的区域响应为0。
10.2.3 线检测
复杂度更高的检测是线检测。对于线检测,可以预期二阶导数将导致更强的响应,并产生比一阶导数更细的线。这样,对于线检测,我们也可使用拉普拉斯模板,适当处理二阶导数的双线效应。
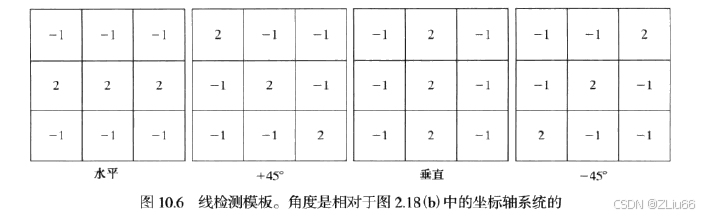
第一个模板对水平方向的线有最佳响应;第二个模板对45°方向的线有最佳响应;第三个模板对垂直方向的线有最佳响应;第四个模板对-45°方向的线有最佳响应。每个模板的首选方向用一个比其他方向更大的系数(如2)加权。每个模板中系数之和为0,表明恒定灰度区域中的响应为0。
若对检测图像中由给定模板定义的方向上的所有线感兴趣,则只须简单对图像运用这个模板,并对结果的绝对值进行阈值处理。留下的点是有最强响应的点,这些点与模板的方向最为接近,且组成了只有一个像素宽的线。
10.2.4 边缘模型
边缘检测是基于灰度突变来分割图像的方法
边缘模型根据它们的灰度剖面分为:台阶模型、斜坡模型和屋顶模型

- 台阶边缘是指在1像素的距离上出现两个灰度级间的理想过渡
- 实际中,数字图像都存在被模糊且带有噪声的边缘,模糊的程度主要取决于聚焦机理(如光学成像中的镜头)中的限制,而噪声水平主要取决于成像系统的电子元件。在这种情况下,边缘被建模为一个更接近灰度斜坡的剖面。斜坡的斜度与边缘的模糊程度成反比。
- 屋顶边缘是通过一个区域的线的模型,屋顶边缘的基底(宽度)由该线的宽度和尖锐度觉得。
结论:
- 对图像中的每条边缘,二阶导数生成两个值(一个不希望的特点);
- 二阶导数的零交叉点可用于定位粗边缘的中心,正如我们将在本节稍后将要说明的那样。某些边缘模型可用来在进入和离开斜坡的地方平滑过渡。
执行边缘检测的三个基本步骤:
- 为降噪对图像进行平滑处理。
- 边缘点的检测。如先前提及得那样,这是一个局部操作,从一幅图像中提取所有的点,这些点是变为边缘点的潜在候选者。
- 边缘定位。这一步的目的是从候选边缘点中选择组成边缘点集合的真实成员。
10.2.5 基本边缘检测
图像梯度及其性质
图像f(x,y)位置处寻找边缘的强度和方向用梯度表征,用表示,并用向量来定义:
该向量有一个重要的几何性质,即指出了f在位置(x,y)处的最大变化率的方向。
向量的大小(长度)表示为M(x,y),即
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1691
1691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









