







目录
第1题
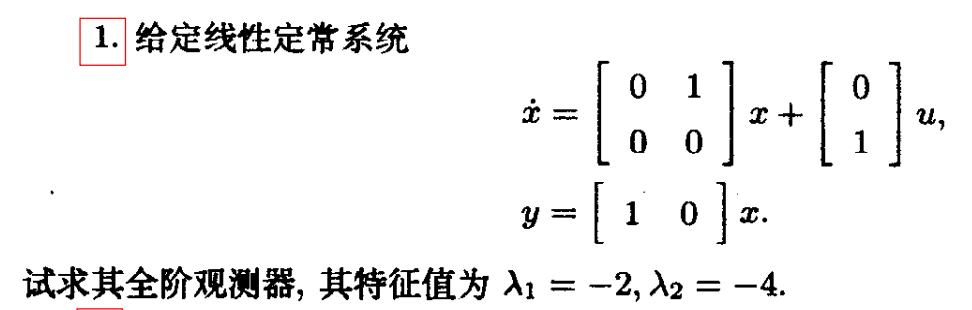
对于题目中给定的线性定成系统,记系统矩阵 A = [ 0 1 0 0 ] A=\left[\begin{array}{ll}0 & 1 \\ 0 & 0\end{array}\right] A=[0010],输入矩阵 B = [ 0 1 ] B=\left[\begin{array}{l}0 \\ 1\end{array}\right] B=[01],输出矩阵 C = [ 1 0 ] C=\left[\begin{array}{ll}1 & 0]\end{array}\right. C=[10]。
已知其全阶观测器的特征值为
λ
1
=
−
2
,
λ
2
=
−
4
\lambda_1=-2, \lambda_2=-4
λ1=−2,λ2=−4,那么期望的观测器特征多项式为:
f
∗
(
s
)
=
(
s
+
2
)
(
s
+
4
)
=
s
2
+
6
s
+
8
f^*(s)=(s+2)(s+4)=s^2+6 s+8
f∗(s)=(s+2)(s+4)=s2+6s+8
在设计全阶观测器时,需要计算增益矩阵
L
=
[
l
1
l
2
]
L=\left[\begin{array}{l}l_1 \\ l_2\end{array}\right]
L=[l1l2],已知原系统的特征多项式为:
∣
s
I
−
A
∣
=
∣
s
−
1
0
s
∣
=
s
2
|s I-A|=\left|\begin{array}{cc} s & -1 \\ 0 & s \end{array}\right|=s^2
∣sI−A∣=
s0−1s
=s2
可构造矩阵
A
−
L
C
A-LC
A−LC为:
A
−
L
C
=
[
0
1
0
0
]
−
[
l
1
l
2
]
[
1
0
]
=
[
−
l
1
1
−
l
2
0
]
\begin{aligned} A-L C & =\left[\begin{array}{ll} 0 & 1 \\ 0 & 0 \end{array}\right]-\left[\begin{array}{l} l_1 \\ l_2 \end{array}\right]\left[\begin{array}{ll} 1 & 0 \end{array}\right] \\ & =\left[\begin{array}{ll} -l_1 & 1 \\ -l_2 & 0 \end{array}\right] \end{aligned}
A−LC=[0010]−[l1l2][10]=[−l1−l210]
故其特征多项式为:
f
(
s
)
=
∣
s
I
−
(
A
−
L
C
)
∣
=
s
2
+
l
1
s
+
l
2
f(s)=|s I-(A-L C)|=s^2+l_1 s+l_2
f(s)=∣sI−(A−LC)∣=s2+l1s+l2
由
f
(
s
)
=
f
∗
(
s
)
f(s)=f^*(s)
f(s)=f∗(s)可得:
s
2
+
l
1
s
+
l
2
=
s
2
+
6
s
+
8
s^2+l_1 s+l_2=s^2+6 s+8
s2+l1s+l2=s2+6s+8
解得
l
1
=
6
,
l
2
=
8
l_1=6, l_2=8
l1=6,l2=8,所以
L
=
[
6
8
]
L=\left[\begin{array}{l}6 \\ 8\end{array}\right]
L=[68]。那么全阶观测器的方程形式为:
x
^
^
˙
=
(
A
−
L
C
)
x
^
+
B
u
+
L
y
\dot{\hat{\hat{x}}}=(A-L C) \hat{x}+B u+L y
x^^˙=(A−LC)x^+Bu+Ly
将
A
,
B
,
C
,
L
A,B,C,L
A,B,C,L带入可得:
x
^
˙
=
(
[
0
1
0
0
]
−
[
6
8
]
[
1
0
]
)
x
^
+
[
0
1
]
u
+
[
6
8
]
y
=
[
−
6
1
−
8
0
]
x
^
+
[
0
1
]
u
+
[
6
8
]
y
\begin{aligned} \dot{\hat{x}} & =\left(\left[\begin{array}{ll} 0 & 1 \\ 0 & 0 \end{array}\right]-\left[\begin{array}{l} 6 \\ 8 \end{array}\right]\left[\begin{array}{ll} 1 & 0 \end{array}\right]\right) \hat{x}+\left[\begin{array}{l} 0 \\ 1 \end{array}\right] u+\left[\begin{array}{l} 6 \\ 8 \end{array}\right] y \\ & =\left[\begin{array}{ll} -6 & 1 \\ -8 & 0 \end{array}\right] \hat{x}+\left[\begin{array}{l} 0 \\ 1 \end{array}\right] u+\left[\begin{array}{l} 6 \\ 8 \end{array}\right] y \end{aligned}
x^˙=([0010]−[68][10])x^+[01]u+[68]y=[−6−810]x^+[01]u+[68]y
令
z
=
x
^
z=\hat{x}
z=x^,则全阶观测器的表达式为:
{ z ˙ = [ − 6 1 − 8 0 ] z + [ 0 1 ] u + [ 6 8 ] y , x ^ = z . \left\{\begin{array}{c} \dot{z}=\left[\begin{array}{ll} -6 & 1 \\ -8 & 0 \end{array}\right] z+\left[\begin{array}{l} 0 \\ 1 \end{array}\right] u+\left[\begin{array}{l} 6 \\ 8 \end{array}\right] y, \\ \hat{x}=z . \end{array}\right. ⎩ ⎨ ⎧z˙=[−6−810]z+[01]u+[68]y,x^=z.
第6题
(1)题解答
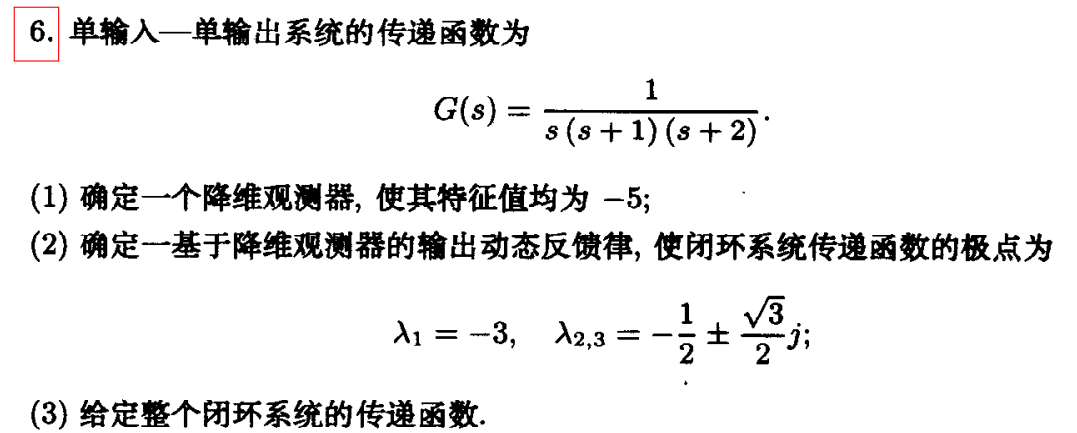
给定单输入-单输出系统的传递函数为:
G
(
s
)
=
1
s
(
s
+
1
)
(
s
+
2
)
G(s)=\frac{1}{s(s+1)(s+2)}
G(s)=s(s+1)(s+2)1
先将该三阶系统对应的传递函数转化为状态空间表示:
A
=
[
0
1
0
0
0
1
−
2
−
3
−
4
]
,
B
=
[
0
0
1
]
,
C
=
[
1
0
0
]
,
D
=
0
A=\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ -2 & -3 & -4 \end{array}\right], \quad B=\left[\begin{array}{l} 0 \\ 0 \\ 1 \end{array}\right], \quad C=\left[\begin{array}{lll} 1 & 0 & 0 \end{array}\right], \quad D=0
A=
00−210−301−4
,B=
001
,C=[100],D=0
在降维观测器的设计时,其维度比原系统小,同时确保观测器的特征值为 -5,假设降维观测器状态方程如下:
w
˙
(
t
)
=
A
o
w
(
t
)
+
B
o
y
(
t
)
+
C
o
u
(
t
)
x
^
(
t
)
=
C
o
w
(
t
)
\begin{gathered} \dot{w}(t)=A_o w(t)+B_o y(t)+C_o u(t) \\ \hat{x}(t)=C_o w(t) \end{gathered}
w˙(t)=Aow(t)+Boy(t)+Cou(t)x^(t)=Cow(t)
由于需要观测器的特征值都为 -5。因此,矩阵
A
o
A_o
Ao 的特征值需要是 -5,最后可得:
{
w
˙
=
[
−
7
1
−
4
−
3
]
w
+
[
−
47
−
34
]
y
+
[
0
1
]
u
,
x
^
=
[
1
7
2
]
y
+
[
0
0
1
0
0
1
]
w
.
\left\{\begin{array}{c} \dot{w}=\left[\begin{array}{cc} -7 & 1 \\ -4 & -3 \end{array}\right] w+\left[\begin{array}{l} -47 \\ -34 \end{array}\right] y+\left[\begin{array}{l} 0 \\ 1 \end{array}\right] u, \\ \hat{x}=\left[\begin{array}{l} 1 \\ 7 \\ 2 \end{array}\right] y+\left[\begin{array}{ll} 0 & 0 \\ 1 & 0 \\ 0 & 1 \end{array}\right] w . \end{array}\right.
⎩
⎨
⎧w˙=[−7−41−3]w+[−47−34]y+[01]u,x^=
172
y+
010001
w.
(2)题解答
给定单输入-单输出系统的传递函数为:
G
(
s
)
=
1
s
(
s
+
1
)
(
s
+
2
)
G(s)=\frac{1}{s(s+1)(s+2)}
G(s)=s(s+1)(s+2)1
先将该三阶系统对应的传递函数转化为状态空间表示:
A
=
[
0
1
0
0
0
1
−
2
−
3
−
4
]
,
B
=
[
0
0
1
]
,
C
=
[
1
0
0
]
,
D
=
0
A=\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ -2 & -3 & -4 \end{array}\right], \quad B=\left[\begin{array}{l} 0 \\ 0 \\ 1 \end{array}\right], \quad C=\left[\begin{array}{lll} 1 & 0 & 0 \end{array}\right], \quad D=0
A=
00−210−301−4
,B=
001
,C=[100],D=0
为估计系统的状态,设计一个降维观测器。该观测器的状态空间方程为:
w
˙
(
t
)
=
A
o
w
(
t
)
+
B
o
y
(
t
)
+
C
o
u
(
t
)
x
^
(
t
)
=
C
o
w
(
t
)
\begin{gathered} \dot{w}(t)=A_o w(t)+B_o y(t)+C_o u(t) \\ \hat{x}(t)=C_o w(t) \end{gathered}
w˙(t)=Aow(t)+Boy(t)+Cou(t)x^(t)=Cow(t)
假设降维观测器的极点为 -5,根据第1题的结果,已知观测器的状态方程为:
A
o
=
[
−
7
1
−
4
−
3
]
,
B
o
=
[
−
47
−
34
]
,
C
o
=
[
1
7
2
]
A_o=\left[\begin{array}{cc} -7 & 1 \\ -4 & -3 \end{array}\right], \quad B_o=\left[\begin{array}{l} -47 \\ -34 \end{array}\right], \quad C_o=\left[\begin{array}{lll} 1 & 7 & 2 \end{array}\right]
Ao=[−7−41−3],Bo=[−47−34],Co=[172]
设计一个使得闭环系统的极点满足给定要求的反馈律,输出反馈律为:
u
(
t
)
=
−
K
x
^
(
t
)
u(t)=-K \hat{x}(t)
u(t)=−Kx^(t)
为使其闭环系统传递函数的极点为
λ
1
=
−
3
,
λ
2
,
3
=
−
1
2
±
3
2
j
\lambda_1=-3, \quad \lambda_{2,3}=-\frac{1}{2} \pm \frac{\sqrt{3}}{2} j
λ1=−3,λ2,3=−21±23j,采用极点配置的方法,记闭环系统的状态方程
x
˙
(
t
)
=
(
A
−
B
K
)
x
(
t
)
\dot{x}(t)=(A-B K) x(t)
x˙(t)=(A−BK)x(t)
展开该多项式后得到闭环系统的特征方程,然后通过求解该方程来确定反馈增益为
K = [ − 3 − 2 − 1 ] K=\left[\begin{array}{lll} -3 & -2 & -1] \end{array}\right. K=[−3−2−1]
(3)题解答
前两题设计了基于降维观测器的输出动态反馈律,假设观测器的状态方程为:
w
˙
(
t
)
=
A
o
w
(
t
)
+
B
o
y
(
t
)
+
C
o
u
(
t
)
x
^
(
t
)
=
C
o
w
(
t
)
\begin{gathered} \dot{w}(t)=A_o w(t)+B_o y(t)+C_o u(t) \\ \hat{x}(t)=C_o w(t) \end{gathered}
w˙(t)=Aow(t)+Boy(t)+Cou(t)x^(t)=Cow(t)
基于降维观测器的反馈律为
u
(
t
)
=
−
K
x
^
(
t
)
u(t)=-K \hat{x}(t)
u(t)=−Kx^(t),故该方程可进一步写成:
x
˙
(
t
)
=
(
A
−
B
K
)
x
(
t
)
−
B
K
C
o
w
(
t
)
\dot{x}(t)=(A-B K) x(t)-B K C_o w(t)
x˙(t)=(A−BK)x(t)−BKCow(t)
闭环传递函数
G
c
l
(
s
)
G_{cl}(s)
Gcl(s)由以下公式给出:
G
c
l
(
s
)
=
C
(
s
I
−
(
A
−
B
K
)
)
−
1
B
G_{\mathrm{cl}}(s)=C(s I-(A-B K))^{-1} B
Gcl(s)=C(sI−(A−BK))−1B
将前面求得的反馈增益矩阵
K
K
K代入可得:
A
−
B
K
=
[
0
1
0
0
0
1
−
2
−
3
−
4
]
−
[
0
0
1
]
[
−
3
−
2
−
1
]
=
[
0
1
0
0
0
1
1
1
−
3
]
A-B K=\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ -2 & -3 & -4 \end{array}\right]-\left[\begin{array}{l} 0 \\ 0 \\ 1 \end{array}\right]\left[\begin{array}{lll} -3 & -2 & -1 \end{array}\right] =\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 1 & -3 \end{array}\right]
A−BK=
00−210−301−4
−
001
[−3−2−1]=
00110101−3
可知闭环系统的传递函数:
G
c
l
(
s
)
=
[
1
0
0
]
(
s
I
−
[
0
1
0
0
0
1
1
1
−
3
]
)
−
1
[
0
0
1
]
G_{\mathrm{cl}}(s)=\left[\begin{array}{lll} 1 & 0 & 0 \end{array}\right]\left(s I-\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 1 & 1 & -3 \end{array}\right]\right)^{-1}\left[\begin{array}{l} 0 \\ 0 \\ 1 \end{array}\right]
Gcl(s)=[100]
sI−
00110101−3
−1
001
最终可得闭环传递函数为:
G
c
l
(
s
)
=
−
3
s
2
−
6
s
−
6
s
3
+
3
s
2
+
2
s
G_{\mathrm{cl}}(s)=\frac{-3 s^2-6 s-6}{s^3+3 s^2+2 s}
Gcl(s)=s3+3s2+2s−3s2−6s−6
第7题
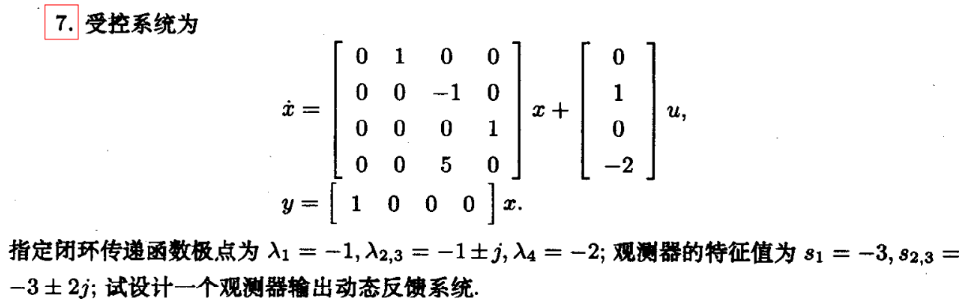
设计观测器的状态方程为:
w
˙
=
A
o
w
+
B
o
y
+
C
o
u
x
^
=
C
o
w
\begin{gathered} \dot{w}=A_o w+B_o y+C_o u \\ \hat{x}=C_o w \end{gathered}
w˙=Aow+Boy+Coux^=Cow
采用极点配置法设计观测器,根据给定的观测器极点,观测器的矩阵
A
o
A_o
Ao 和
B
o
B_o
Bo 可以通过设计满足这些极点来确定。假设观测器的状态方程为:
w
˙
=
A
o
w
+
B
o
y
+
C
o
u
\dot{w}=A_o w+B_o y+C_o u
w˙=Aow+Boy+Cou
可知观测器的矩阵为:
A
o
=
[
−
9
−
1
0
36
0
1
84
5
0
]
,
B
o
=
[
−
45
408
576
]
,
C
o
=
[
1
0
−
2
]
A_o=\left[\begin{array}{ccc} -9 & -1 & 0 \\ 36 & 0 & 1 \\ 84 & 5 & 0 \end{array}\right], \quad B_o=\left[\begin{array}{c} -45 \\ 408 \\ 576 \end{array}\right], \quad C_o=\left[\begin{array}{lll} 1 & 0 & -2 \end{array}\right]
Ao=
−93684−105010
,Bo=
−45408576
,Co=[10−2]
系统状态的估计或者说观测器的输出是状态
x
^
(
t
)
\hat{x}(t)
x^(t)。观测器的输出方程为:
x
^
=
C
o
w
\hat{x}=C_o w
x^=Cow
故观测器的设计公式为:
x
^
=
[
w
+
[
y
−
36
−
84
]
]
+
[
0
0
0
1
0
0
0
1
0
0
0
1
]
w
+
[
1
9
−
36
−
84
]
y
\hat{x}=\left[w+\left[\begin{array}{c} y \\ -36 \\ -84 \end{array}\right]\right]+\left[\begin{array}{ccc} 0 & 0 & 0 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right] w+\left[\begin{array}{c} 1 \\ 9 \\ -36 \\ -84 \end{array}\right] y
x^=
w+
y−36−84
+
010000100001
w+
19−36−84
y
设计一个基于观测器的输出动态反馈控制器。输出动态反馈控制器为:
u
(
t
)
=
−
K
x
^
(
t
)
+
v
u(t)=-K \hat{x}(t)+v
u(t)=−Kx^(t)+v
由于指定
λ
1
=
−
1
,
λ
2
,
3
=
−
1
±
j
,
λ
4
=
−
2
\lambda_1=-1, \lambda_{2,3}=-1 \pm j, \lambda_4=-2
λ1=−1,λ2,3=−1±j,λ4=−2,通过求解闭环系统的特征方程可以求出
K
K
K:
K
=
[
4
3
10
3
49
6
25
6
]
K=\left[\begin{array}{llll} \frac{4}{3} & \frac{10}{3} & \frac{49}{6} & \frac{25}{6} \end{array}\right]
K=[34310649625]
综上所述,观测器输出动态反馈系统为
{ w ˙ = [ − 9 − 1 0 36 0 1 84 5 0 ] w + [ − 45 408 576 ] y + [ 1 0 − 2 ] u , x ^ = [ y w + [ 9 − 36 − 84 ] ] + [ 0 0 0 1 0 0 0 1 0 0 0 1 ] w + [ 1 9 − 36 − 84 ] y , u = [ 4 3 10 3 49 6 25 6 ] x ^ + v . \left\{\begin{array}{c} \dot{w}=\left[\begin{array}{ccc} -9 & -1 & 0 \\ 36 & 0 & 1 \\ 84 & 5 & 0 \end{array}\right] w+\left[\begin{array}{c} -45 \\ 408 \\ 576 \end{array}\right] y+\left[\begin{array}{c} 1 \\ 0 \\ -2 \end{array}\right] u, \\ \hat{x}=\left[\begin{array}{c} y \\ w+\left[\begin{array}{c} 9 \\ -36 \\ -84 \end{array}\right] \end{array}\right]+\left[\begin{array}{lll} 0 & 0 & 0 \\ 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right] w+\left[\begin{array}{c} 1 \\ 9 \\ -36 \\ -84 \end{array}\right] y, \\ u=\left[\begin{array}{llll} \frac{4}{3} & \frac{10}{3} & \frac{49}{6} & \frac{25}{6} \end{array}\right] \hat{x}+v . \end{array}\right. ⎩ ⎨ ⎧w˙= −93684−105010 w+ −45408576 y+ 10−2 u,x^= yw+ 9−36−84 + 010000100001 w+ 19−36−84 y,u=[34310649625]x^+v.




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











