




💗1.脉冲响应与阶跃响应的计算与分析
接下来,我们通过公式来解析各个参数为何具有上述作用。正如之前所说,系统的行为(公式)会根据ζ值的不同而发生变化,因此我们将分别讨论不同的情况。
※ 公式会变得有些复杂,但可以跳过公式变形的部分。特别是第一次接触时,如果认真跟着公式推导,可能会在中途失去阅读兴趣,因此只看计算结果就可以了。
💓1.1系统具有复极点时的响应
首先,我们考虑系统具有复极点的情况,即0 ≤ ζ < 1的情况。简单来说,就是系统发生振荡的情况。
二阶系统的最大特点是振荡响应,因此在实际应用中,这种情况是最重要的。
将传递函数表示为增益K、阻尼系数ζ和固有角频率ωn,是因为通过这些参数可以清晰地表达振荡的特性。
💞1.1.1 脉冲响应
给系统一个脉冲输入 U(s)=1,求脉冲响应 Y(s)
Y
(
s
)
=
G
(
s
)
U
(
s
)
=
K
ω
n
2
s
2
+
2
ζ
ω
n
s
+
ω
n
2
Y(s)=G(s)U(s)= \frac{K \omega _n ^2}{ s^2 + 2 \zeta \omega _n s + \omega _n ^2}
Y(s)=G(s)U(s)=s2+2ζωns+ωn2Kωn2
我们将对其进行逆拉普拉斯变换,来研究时间域中的行为。求解的方法有多种,但在这里我们将使用以下的逆拉普拉斯变换公式
ω ( s + a ) 2 + ω 2 → 拉 普 拉 斯 逆 变 换 e − a t sin ω t \frac{\omega}{(s+a)^2 + \omega ^2} \quad \xrightarrow{\large 拉普拉斯逆变换}\quad e^{-at}\sin \omega t (s+a)2+ω2ω拉普拉斯逆变换e−atsinωt
对脉冲响应 Y(s) 进行变形,并将其代入这个公式,得到下式。
Y
(
s
)
=
K
ω
n
1
−
ζ
2
⋅
1
−
ζ
2
ω
n
(
s
+
ζ
ω
n
)
2
+
(
1
−
ζ
2
)
ω
n
2
→
逆
变
换
y
(
t
)
=
K
ω
n
1
−
ζ
2
e
−
ζ
ω
n
t
sin
(
ω
n
1
−
ζ
2
t
)
Y(s) = \frac{K \omega _n}{\sqrt{1-\zeta ^2}}\cdot \frac{\sqrt{1-\zeta ^2}\omega _n}{(s + \zeta \omega _n)^2 + (1-\zeta ^2) \omega _n ^2} \ \xrightarrow{\large 逆变换} \ y(t)=\frac{K \omega _n}{\sqrt{1-\zeta ^2}} e^{-\zeta \omega _n t} \sin (\omega _n \sqrt{1-\zeta ^2}t)
Y(s)=1−ζ2Kωn⋅(s+ζωn)2+(1−ζ2)ωn21−ζ2ωn 逆变换 y(t)=1−ζ2Kωne−ζωntsin(ωn1−ζ2t)
将这个脉冲响应绘制出来,得到如下图形:
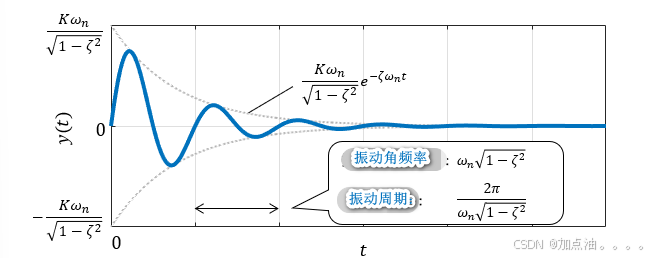
我们可以逐步解释公式的含义。
首先,可以看出振荡行为是由正弦函数 sin 引起的。然后,指数函数
e
−
t
e^{-t}
e−t使振荡逐渐收敛,前面的系数决定了振荡的大小(振幅)
y ( t ) = K ω n 1 − ζ 2 ⏟ 大 小 ⋅ K ω n 1 − ζ 2 e − ζ ω n t ⏟ 收 敛 ⋅ K ω n 1 − ζ 2 sin ( ω n 1 − ζ 2 t ) ⏟ 振 动 y(t)=\underbrace{\frac{K \omega _n}{\sqrt{1-\zeta ^2}}}_{大小} \cdot \underbrace{\vphantom{\frac{K \omega _n}{\sqrt{1-\zeta ^2}}}e^{-\zeta \omega _n t} }_{收敛} \cdot \underbrace{\vphantom{\frac{K \omega _n}{\sqrt{1-\zeta ^2}}}\sin (\omega _n \sqrt{1-\zeta ^2}t)}_{振动} y(t)=大小 1−ζ2Kωn⋅收敛 1−ζ2Kωne−ζωnt⋅振动 1−ζ2Kωnsin(ωn1−ζ2t)
- 首先,我们关注决定大小的部分 K ω n 1 − ζ 2 \frac{K \omega _n}{\sqrt{1-\zeta ^2}} 1−ζ2Kωn虽然形式看起来有些复杂,但最终它只是一个系数。增益 K 仅在这一部分起作用,因此无论 ζ 和 ω n的值如何,通过调整 K,我们可以自由地决定输出的大小。
- 接下来,关注决定收敛性的部分 e − ζ ω n t e^{-\zeta \omega _n t} e−ζωnt 。由于是指数函数,系数 ζ ωn越大,收敛越快。因此,ζ 和 ωn各自越大,收敛速度就越快。另外,当 ζ=0 时,这部分变为 1,意味着振荡不会收敛。
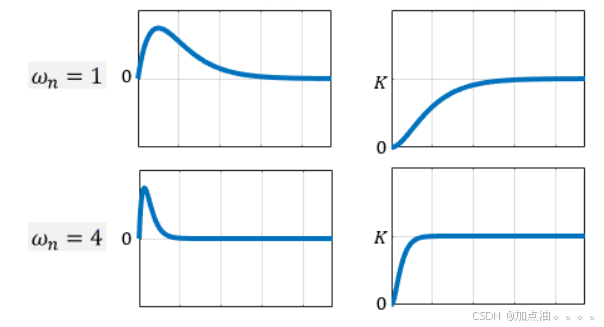
- 最后,关注产生振荡的部分 sin ( ω n 1 − ζ 2 t ) \sin (\omega _n \sqrt{1-\zeta ^2}t) sin(ωn1−ζ2t)这个振荡的角频率是 ω n 1 − ζ 2 \omega _n \sqrt{1-\zeta ^2} ωn1−ζ2因此,ωn越大,ζ 越小,振荡越快。特别是,当 ζ=0 时(即振荡不收敛时),振荡是最迅速的,那个时候的角频率是 ωn由此可以看出,固有角频率 ωn是系统操作速度(振荡频率)的一个指标.。
💞1.1.2 阶跃响应
j阶跃输入为
U
(
s
)
=
1
s
U(s)=\frac{1}{s}
U(s)=s1,输出响应为:
Y
(
s
)
=
G
(
s
)
U
(
s
)
=
K
ω
n
2
s
2
+
2
ζ
ω
n
s
+
ω
n
2
⋅
1
s
Y(s)=G(s)U(s)=\frac{K \omega _n ^2}{ s^2 + 2 \zeta \omega _n s + \omega _n ^2}\cdot \frac{1}{s}
Y(s)=G(s)U(s)=s2+2ζωns+ωn2Kωn2⋅s1
为了进行逆拉普拉斯变换,(凭借毅力)😂将公式进行部分分式分解:
KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲Y(s)&=K \left( …
对这个进行逆拉普拉斯变换,研究其在时间域中的行为。我们将应用以下的拉普拉斯变换公式:
ω
(
s
+
a
)
2
+
ω
2
→
逆
变
换
e
−
a
t
sin
ω
t
\frac{\omega}{(s+a)^2 + \omega ^2} \quad \xrightarrow{\large逆变换}\quad e^{-at}\sin \omega t
(s+a)2+ω2ω逆变换e−atsinωt
ω
(
s
+
a
)
2
+
ω
2
→
逆
变
换
e
−
a
t
sin
ω
t
\frac{\omega}{(s+a)^2 + \omega ^2} \quad \xrightarrow{\large 逆变换}\quad e^{-at}\sin \omega t
(s+a)2+ω2ω逆变换e−atsinωt
KaTeX parse error: No such environment: align at position 8: \begin{̲a̲l̲i̲g̲n̲}̲ y(t) &= K \lef…
ϕ = tan − 1 ( 1 − ζ 2 ζ ) \phi=\tan ^{-1}\Bigl( \frac{\sqrt{1-\zeta^2}}{\zeta}\Bigr) ϕ=tan−1(ζ1−ζ2)
将这个阶跃响应绘制出来,得到如下图形:
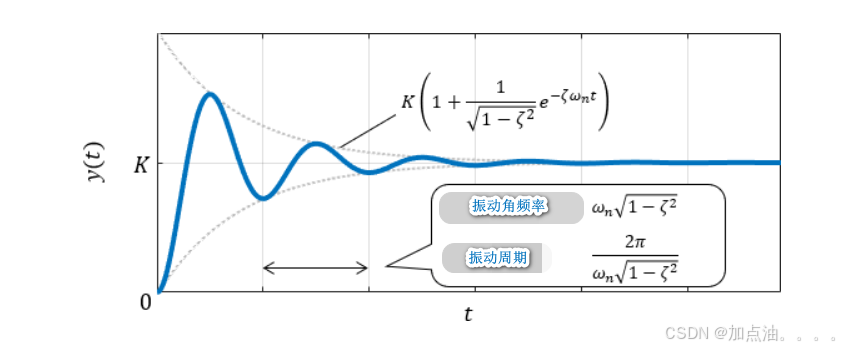
从公式中可以看到,与之前一样,它由决定大小的部分、决定收敛性部分和产生振荡的部分组成。
y ( t ) = 1 1 K ⏟ 大 小 { 1 – 1 1 − ζ 2 1 1 e − ζ ω n t ⏟ 收 敛 1 1 sin ( ω n 1 − ζ 2 t + ϕ ) ⏟ 振 动 } y(t) = \underbrace{\vphantom{\frac{1}{\sqrt{1}}}K}_{大小} \Bigg\{ 1 – \frac{1}{\sqrt{1-\zeta ^2}}\ \underbrace{\vphantom{\frac{1}{\sqrt{1}}}e^{-\zeta \omega _n t}}_{收敛}\ \underbrace{\vphantom{\frac{1}{\sqrt{1}}}\sin (\omega _n \sqrt{1-\zeta^2}t + \phi)}_{振动}\Biggr\} y(t)=大小 11K{1–1−ζ21 收敛 11e−ζωnt 振动 11sin(ωn1−ζ2t+ϕ)}
虽然式子的形式不同,但作用于各部分的系数形态相同,因此各参数与振荡特性之间的关系与脉冲响应的情况完全相同。
以上是系统具有复极点的情况。如最初所述,实际应用中,这种情况是最为重要的。接下来将讨论系统具有实极点的情况,由于各参数的作用基本相同,因此可以跳过不看。
💓1.2系统具有单一实极点的情况
考虑系统具有单一实极点的情况,即 ζ=1 的情况。简而言之,就是系统刚好不振荡的情况。将 ζ=1 代入传递函数后,得到下式:
G
(
s
)
=
K
ω
n
2
(
s
+
ω
n
)
2
G(s) = \frac{K\omega _n ^2}{(s+\omega _n)^2}
G(s)=(s+ωn)2Kωn2
💞1.2.1 脉冲响应
给系统一个脉冲输入 U(s)=1,求脉冲响应。只需要用逆拉普拉斯变换的公式就能解决了。
Y ( s ) = G ( s ) U ( s ) = K ω n 2 ( s + ω n ) 2 → 逆 变 换 y ( t ) = K ω n 2 ⏟ 大 小 t K ω n 2 e − ω n t ⏟ 收 敛 Y(s)=G(s)U(s)=\frac{K\omega _n ^2}{(s+\omega _n)^2}\ \xrightarrow{\large 逆变换} \ y(t)=\underbrace{K\omega _n ^2}_{大小}\ t\ \underbrace{\vphantom{K\omega _n ^2}e^{-\omega _n t}}_{收敛} Y(s)=G(s)U(s)=(s+ωn)2Kωn2 逆变换 y(t)=大小 Kωn2 t 收敛 Kωn2e−ωnt
💞1.2.2 阶跃响应
Y ( s ) = G ( s ) U ( s ) = K ω n 2 ( s + ω n ) 2 ⋅ 1 s = K { 1 s – 1 s + ω n − ω n ( s + ω n ) 2 } Y(s)=G(s)U(s)=\frac{K\omega _n ^2}{(s+\omega _n)^2}\cdot \frac{1}{s} = K \left\{ \frac{1}{s} – \frac{1}{s+\omega _n}- \frac{\omega _n}{(s+\omega _n)^2} \right\} Y(s)=G(s)U(s)=(s+ωn)2Kωn2⋅s1=K{s1–s+ωn1−(s+ωn)2ωn}
y ( t ) = K ( 1 – e − ω n t – ω n t e − ω n t ) = K ⏟ 大 小 { 1 – ( 1 + ω n t ) e − ω n t ⏟ 收 敛 } y(t) = K \left( 1 – e^{-\omega _n t} – \omega _n te^{-\omega _n t} \right) = \underbrace{K}_{大小} \bigl\{ 1 – ( 1+ \omega _n t) \underbrace{e^{-\omega _n t}}_{收敛}\bigr\} y(t)=K(1–e−ωnt–ωnte−ωnt)=大小 K{1–(1+ωnt)收敛 e−ωnt}
由上式可知,无论是脉冲响应还是阶跃响应,各个参数所起的作用都和以往是相同的。也就是说,增益 K 会改变输出的大小,而位于自然指数 e 右上角的固有角频率 ωn 越大,收敛速度就越快。
💓1.3系统具有两个实极点的情况
考虑系统具有两个实极点的情况,也就是 ζ>1 的情况。简而言之,就是系统不振荡的情况。
💞1.3.1 脉冲响应
对于具有极点 p1、p2 的系统
G
^
(
s
)
=
1
(
s
−
p
1
)
(
s
−
p
2
)
\hat{G}(s)=\frac{1}{(s-p_1)(s-p_2)}
G^(s)=(s−p1)(s−p2)1,其脉冲响应可由下式得出。
y
^
(
t
)
=
1
p
1
−
p
2
(
e
p
1
t
–
e
p
2
t
)
\hat{y}(t) = \frac{1}{p_1-p_2} (e^{p_1 t} – e^{p_2 t})
y^(t)=p1−p21(ep1t–ep2t)
将目前所考虑的系统的极点
p
1
=
−
ω
n
(
ζ
−
ζ
2
−
1
)
p1 = -\omega_{n}(\zeta - \sqrt{\zeta^{2} - 1})
p1=−ωn(ζ−ζ2−1)
、
p
2
=
−
ω
n
(
ζ
+
ζ
2
−
1
)
p2 = -\omega_{n}(\zeta + \sqrt{\zeta^{2} - 1})
p2=−ωn(ζ+ζ2−1)代入到这个结果中,再乘以分子的系数
K
ω
n
2
K\omega_{n}^{2}
Kωn2,就能求出系统的脉冲响应
y
(
t
)
y(t)
y(t)。
y ( t ) = K ω n 2 ζ 2 − 1 ⏟ 大 小 { K ω n 2 ζ 2 − 1 e − ω n ( ζ – ζ 2 – 1 ) t ⏟ 极 点 1 ( 收 敛 ) K ω n 2 ζ 2 − 1 − e − ω n ( ζ + ζ 2 – 1 ) t ⏟ 极 点 2 ( 收 敛 ) } y(t) = \underbrace{\frac{K \omega _n}{2 \sqrt{\zeta^2 -1}}}_{大小} \biggl\{ \underbrace{\vphantom{\frac{K \omega _n}{2 \sqrt{\zeta^2 -1}}}e^{-\omega _n ( \zeta – \sqrt{\zeta ^2 – 1})t}}_{极点1}{(收敛)} \ \underbrace{\vphantom{\frac{K \omega _n}{2 \sqrt{\zeta^2 -1}}}-e^{-\omega _n ( \zeta + \sqrt{\zeta ^2 – 1})t}}_{极点2}{(收敛)}\biggr\} y(t)=大小 2ζ2−1Kωn{极点1 2ζ2−1Kωne−ωn(ζ–ζ2–1)t(收敛) 极点2 2ζ2−1Kωn−e−ωn(ζ+ζ2–1)t(收敛)}
💞1.3.2 阶跃响应
对于具有极点p1、p2的系统
G
^
(
s
)
=
1
(
s
−
p
1
)
(
s
−
p
2
)
\hat{G}(s)=\frac{1}{(s - p1)(s - p2)}
G^(s)=(s−p1)(s−p2)1,其阶跃响应(\hat{y}(s))可由下式得出。
y
^
(
t
)
=
1
p
1
(
p
1
−
p
2
)
e
p
1
t
–
1
p
2
(
p
1
−
p
2
)
e
p
2
t
+
1
p
1
p
2
\hat{y}(t) = \frac{1}{p_1(p_1-p_2)} e^{p_1 t} – \frac{1}{p_2(p_1-p_2)} e^{p_2 t} + \frac{1}{p_1 p_2}
y^(t)=p1(p1−p2)1ep1t–p2(p1−p2)1ep2t+p1p21
将当前所考虑的系统的极点 p 1 = − ω n ( ζ − ζ 2 − 1 ) p1 = -\omega_{n}(\zeta - \sqrt{\zeta^{2} - 1}) p1=−ωn(ζ−ζ2−1)、 p 2 = − ω n ( ζ + ζ 2 − 1 ) p2 = -\omega_{n}(\zeta + \sqrt{\zeta^{2} - 1}) p2=−ωn(ζ+ζ2−1)代入到这个结果中,再乘以分子的系数 K ω n 2 K\omega_{n}^{2} Kωn2,就可以求出该系统的阶跃响应 y ( t ) y(t) y(t)。
y ( t ) = ζ + ζ 2 – 1 2 ζ 2 − 1 K ⏟ 大 小 { 1 − ζ + ζ 2 – 1 2 ζ 2 − 1 e − ω n ( ζ – ζ 2 – 1 ) t ⏟ 极 点 1 ( 收 敛 ) + ζ – ζ 2 – 1 2 ζ 2 − 1 e − ω n ( ζ + ζ 2 – 1 ) t ⏟ 极 点 2 ( 收 敛 ) } y(t) = \underbrace{\vphantom{\frac{\zeta + \sqrt{\zeta^2 – 1}}{2\sqrt{\zeta^2 -1}}}K}_{大小} \Biggl\{ 1\ \underbrace{- \frac{\zeta + \sqrt{\zeta^2 – 1}}{2\sqrt{\zeta^2 -1}}e^{-\omega _n ( \zeta – \sqrt{\zeta ^2 – 1})t}}_{极点1(收敛)} + \underbrace{\frac{\zeta – \sqrt{\zeta^2 – 1}}{2\sqrt{\zeta^2 -1}}e^{-\omega _n ( \zeta + \sqrt{\zeta ^2 – 1})t}}_{极点2(收敛)} \Biggr\} y(t)=大小 2ζ2−1ζ+ζ2–1K{1 极点1(收敛) −2ζ2−1ζ+ζ2–1e−ωn(ζ–ζ2–1)t+极点2(收敛) 2ζ2−1ζ–ζ2–1e−ωn(ζ+ζ2–1)t}
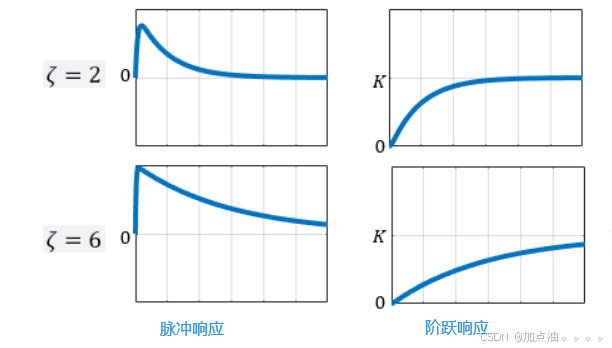
由于存在两个实极点,所以脉冲响应和阶跃响应都具备两种动作模式,但各个参数所起的作用与以往是相同的。也就是说,增益K会改变输出的大小,位于自然指数e右上角的固有角频率ωn越大,收敛速度就越快。
剩下的衰减系数ζ同样也在自然指数e的右上角决定着各模式的收敛速度。虽然省略详细内容,但如下图所示,ζ越大,收敛就会越慢(脉冲响应的峰值出现得会更快)。
💗2.二次系统的使用方法
从这里开始,我们将解释二阶系统的常见用法。
当然了,要是研究对象本质上是二次系统的话,将其建模为 G ( s ) = K ω n 2 s 2 + 2 ζ ω n s + ω n 2 G(s)=\frac{K\omega_{n}^{2}}{s^{2}+2\zeta\omega_{n}s + \omega_{n}^{2}} G(s)=s2+2ζωns+ωn2Kωn2,然后进行分析和控制就可以了。
只是,二次系统因为简单且易于处理,所以除了上述情况之外,还会在各种各样的场合中被使用。典型的例子是,在想要简便地呈现振动特性的场合。关于这一点,我会详细地进行说明。
例如,现在假设想要通过电机来驱动机械臂。实际驱动的时候,假设动作出现了“咔咔”的振动情况。
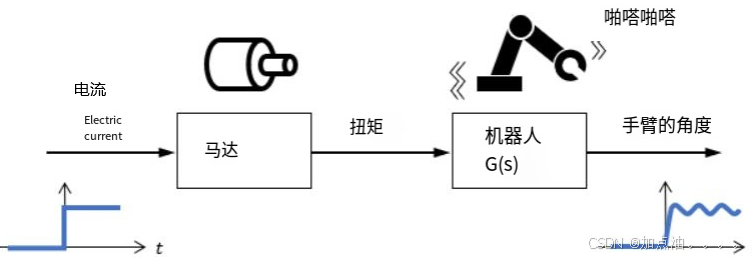
看起来好像是电机性能不佳,施加在机械臂上的扭矩出现振动才导致了上述情况。在这种时候,本可以用传递函数来表示电机的特性,并基于此来控制输入电流,不过假设我们不太清楚电机的特性。
在这样的情况下,像下图所示的那样,通过将电机近似地建模为二次系统,暂且就可以表现出其振动特性了。
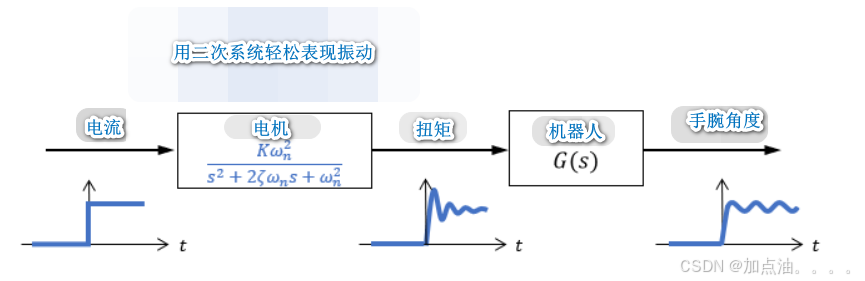
参数设置也很简单,只需用增益K来调整信号的大小,用衰减系数ζ和固有角频率ωn来调整振动的频率和收敛速度即可。
当然,如果能精确地将电机特性用公式表示出来,模型的精度会更高,但在更追求公式的简洁性,或者想先简单地进行实现并大致确认效果的情况下,这种近似处理是非常有效的。
以上就是对二次系统的脉冲响应、阶跃响应及其使用方法的讲解。


















 1901
1901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









