







基于Mask3D实现自制3D点云数据集的实例分割模型
1.数据集制作
参考S3DIS数据格式:
一级文件夹为Area_x(1-6)
二级文件夹 场景名:
Annotations
实例名1_1.txt
实例名1_2.txt
实例名2_1.txt
场景名.txt
将场景拉入CloudCompare 进行对应的分割并按着上述格式进行制作
2.Mask3D实例分割模型的准备
实验环境
根据readme.md文件命令搭建python的conda环境(注意点:注意命令行间的安装目录)
基于S3dis类型: 修改自身数据集
1.将自制数据集放于data文件夹下raw中
2:更改自身数据目录为s3dis 运行python -m datasets.preprocessing.s3dis_preprocessing preprocess \
会生成对于数据的yaml文件
运行前根据自身数据集更改代码中实例数,实例颜色数:
即代码中s3dis_presprocessing.py中的self.class_map self.color_map这两个数据集

训练模型
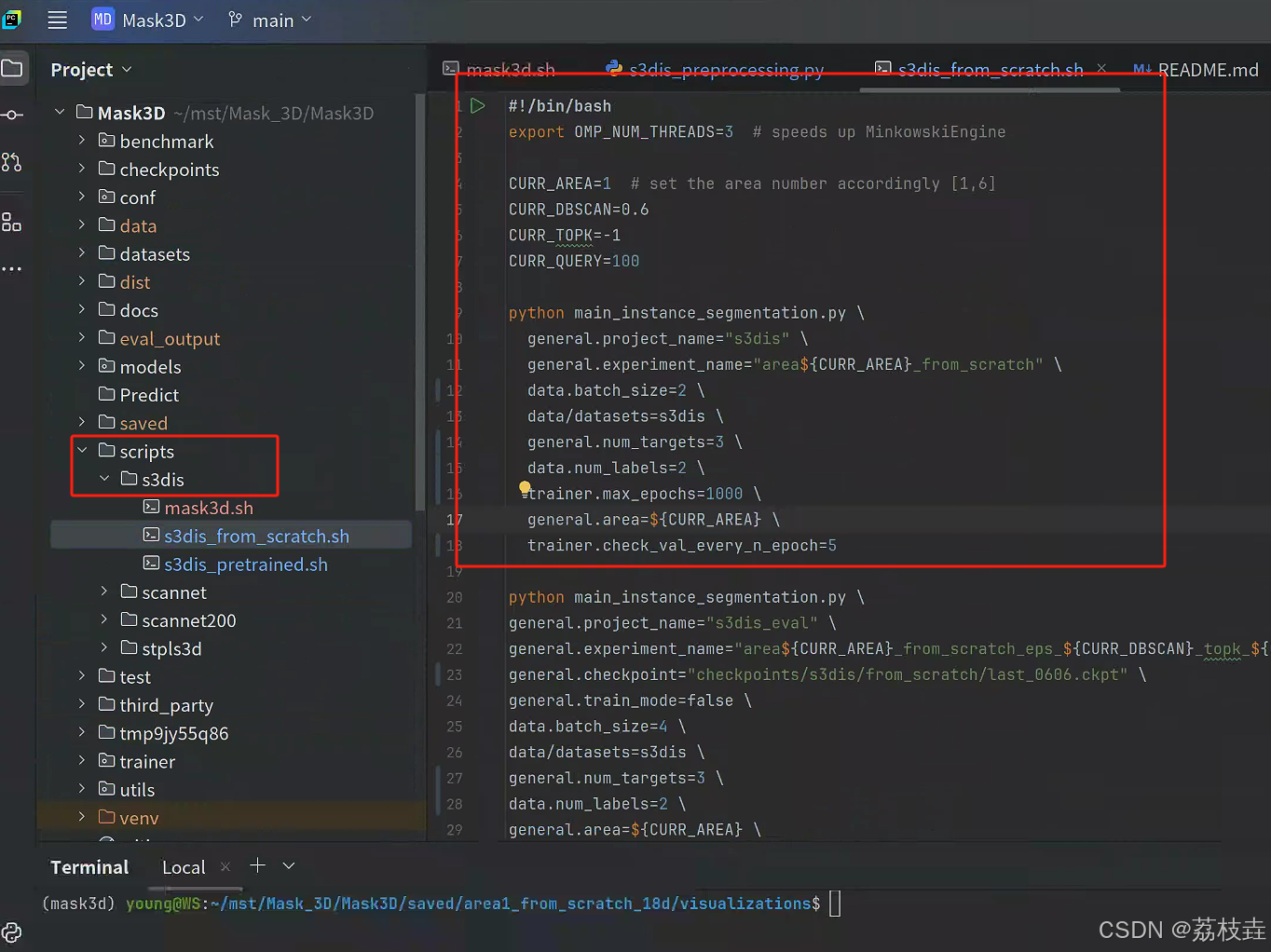
1.注意模型的参数:按需更改参数
save_visualizations:保存后续可视化
workspace:注意改成自己的wandb账号:
num_tagrget:修改成自身实例数+1

2训练脚本:
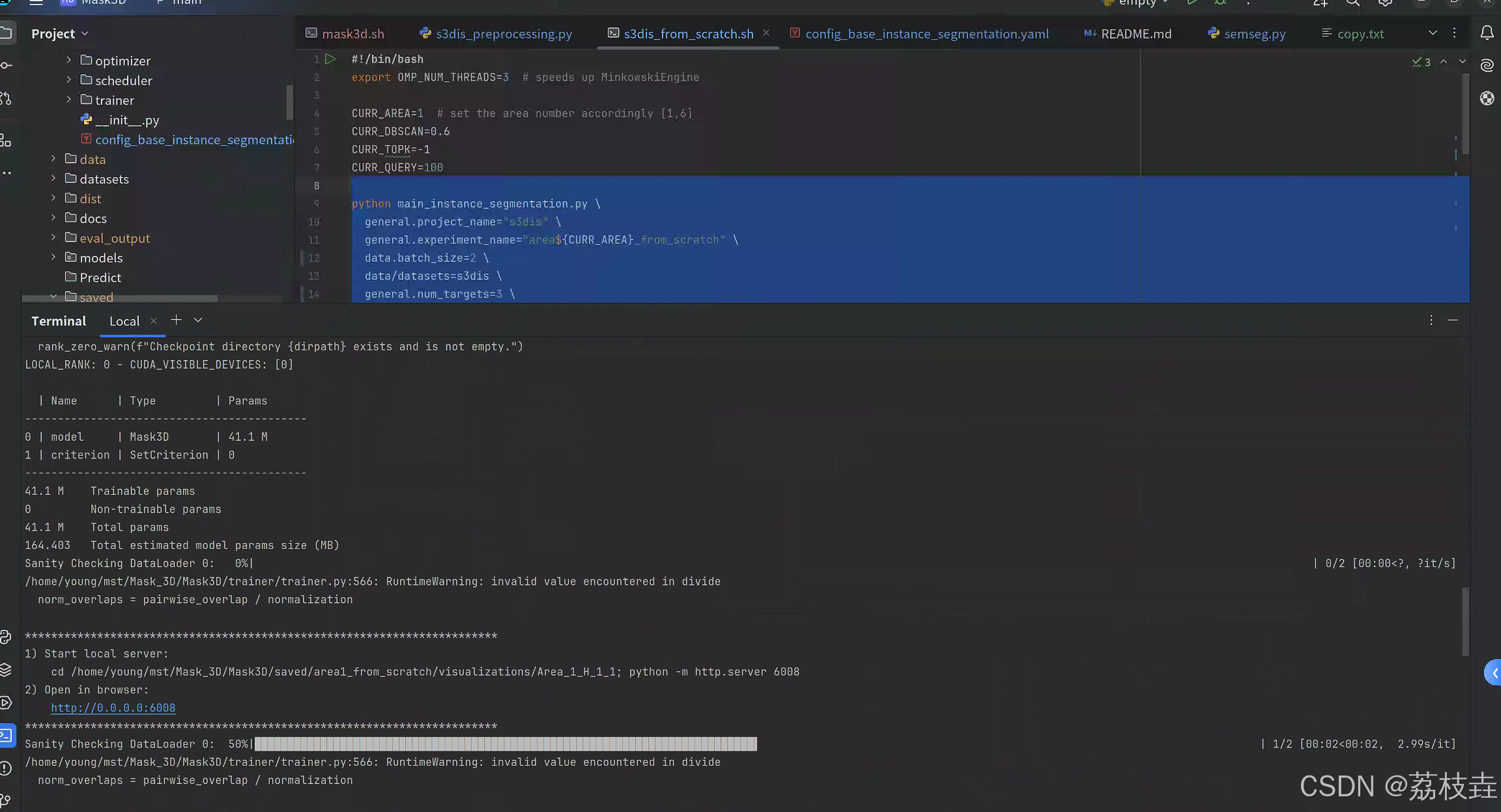
3成功运行:
可视化结果
保存结果位于save文件夹
cd该文件夹位置
使用python -m http.server 6008即可运行
化结果
保存结果位于save文件夹
cd该文件夹位置
使用python -m http.server 6008即可运行
之后就是提取分割点云
后面有时间再写
#####引用
Mask3D模型
CloudCompare


















 7504
7504

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









