







 CARS是一个开源的3D工具,专注于通过摄影测量技术从卫星影像中生成数字表面模型(DSM)。本文详细介绍了如何在Windows上安装Docker和CARS库,以及如何配置和使用CARS进行数据处理,包括数据准备、配置参数设置和结果展示。此外,还提到了CARS与其他开源软件如Pandora和Shareloc的配合使用。
CARS是一个开源的3D工具,专注于通过摄影测量技术从卫星影像中生成数字表面模型(DSM)。本文详细介绍了如何在Windows上安装Docker和CARS库,以及如何配置和使用CARS进行数据处理,包括数据准备、配置参数设置和结果展示。此外,还提到了CARS与其他开源软件如Pandora和Shareloc的配合使用。
Cars使用介绍目录
1.介绍
描述:CARS是一个开源的3D工具,致力于通过摄影测量从卫星影像中产生数字表面模型(DSM);
特点:多视图立体框架旨在大规模的DSM生产,具有强大的性能和模块化设计;
2.安装
2.1 Win安装docker
2.2 安装cars库
两种方式安装:(1)pip install cars;(2)利用docker安装:docker pull cnes/cars
下面的使用及其结果在docker环境中运行:
3.Cars使用
3.1 如何使用
3.1.1 数据准备
数据准备:影像和影像的辅助文件+配置参数文件configfile.json
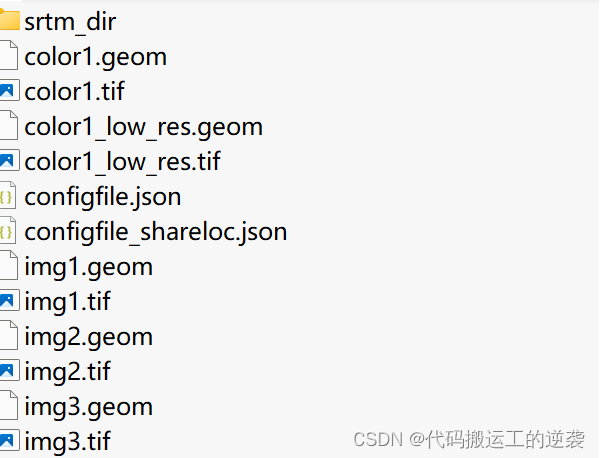
数据展示:
3.1.2 具体使用
使用描述:docker run cnes/cars:latest +【可选参数】+【必须的位置参数】,这里的位置参数即配置参数,
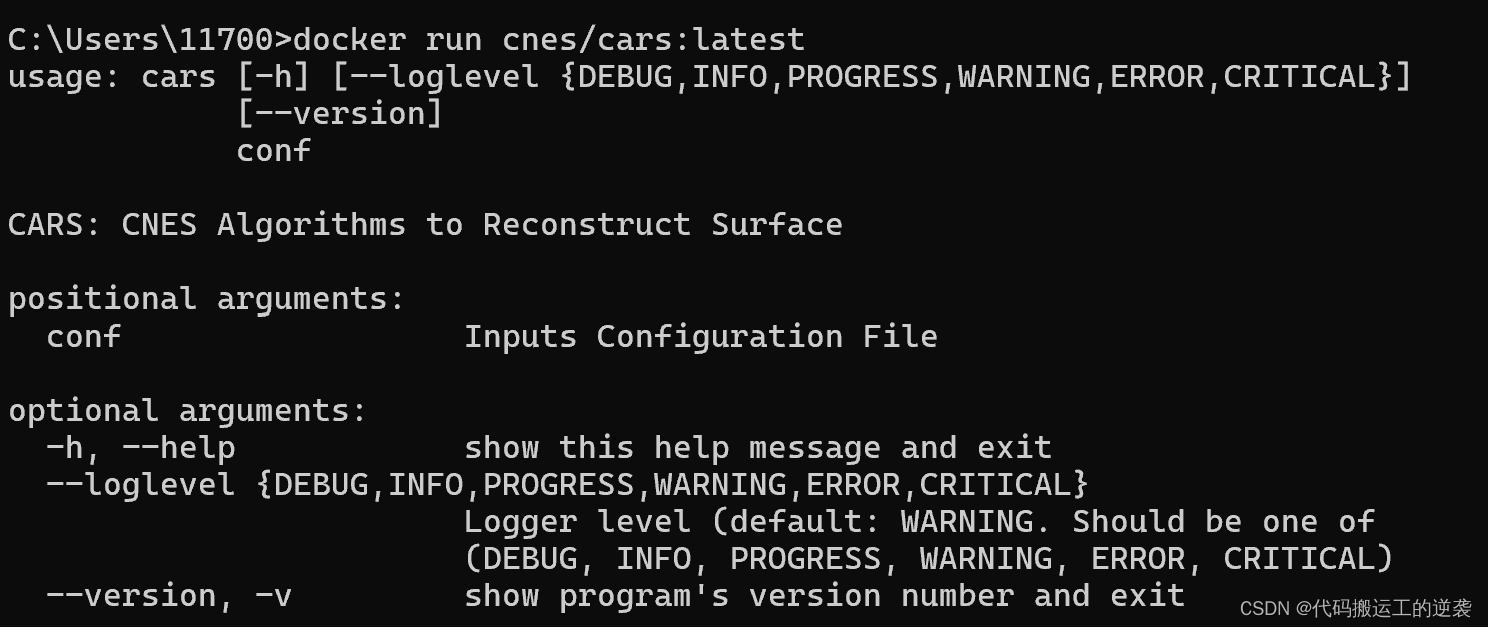
具体使用: docker run cnes/cars:latest configfile.json,配合docker 的其他参数使用,如下图所示,其中关于 -w,-v等参数已做出相应解释。
# -w表示用于指定容器的一个目录, 容器启动时执行的命令会在该目录下执行
# -v 将宿主机的目录挂载到容器目录,形式为本地数据文件路径+“:”+容器文件路径
# cnes/cars:latest镜像文件
docker run -w /data -v C://Users//11 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5029
5029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









