




 本文记录了使用ROS进行单目摄像头标定的过程,重点在于解决了一个特定问题。标定完成后,将camera_calibration.yaml文件放置于指定目录,并调整了usb_cam_with_calibration.launch文件中的image_width和image_height参数,从而成功避免了运行时的错误。
本文记录了使用ROS进行单目摄像头标定的过程,重点在于解决了一个特定问题。标定完成后,将camera_calibration.yaml文件放置于指定目录,并调整了usb_cam_with_calibration.launch文件中的image_width和image_height参数,从而成功避免了运行时的错误。
楼主的运气比较好,标定过程只遇到一个坑
流程
在标定完毕后,将标定好的文件更名为:camera_calibration.yaml
粘贴到:~/ros_exploring/robot_perception/robot_vision目录下
标定好的文件内容如图(这是我自己的标定结果)
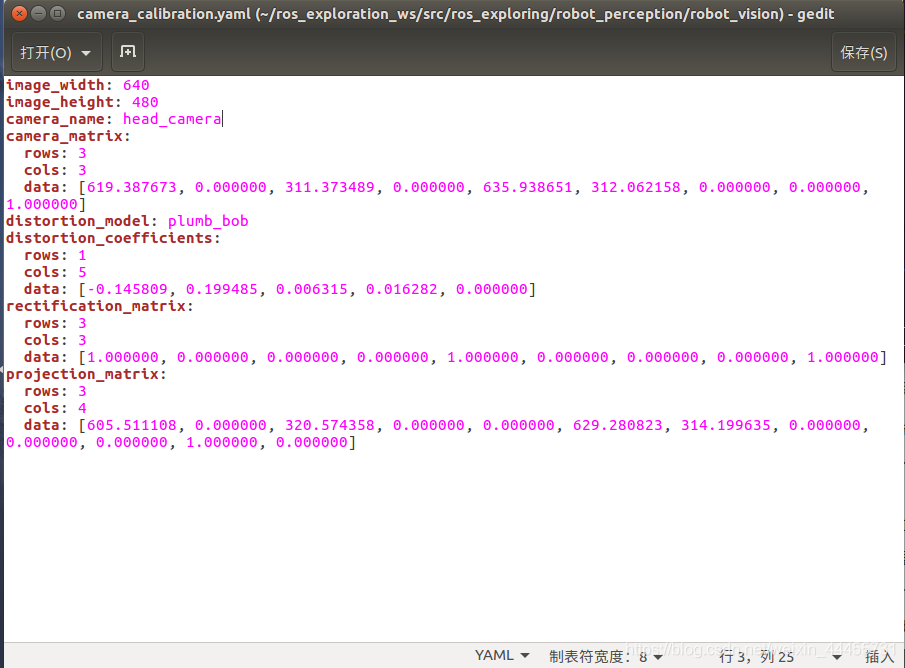
此处要修改camera_name 为 head_camera
运行roslaunch robot_vision usb_cam_with_calibration.launch
报错:
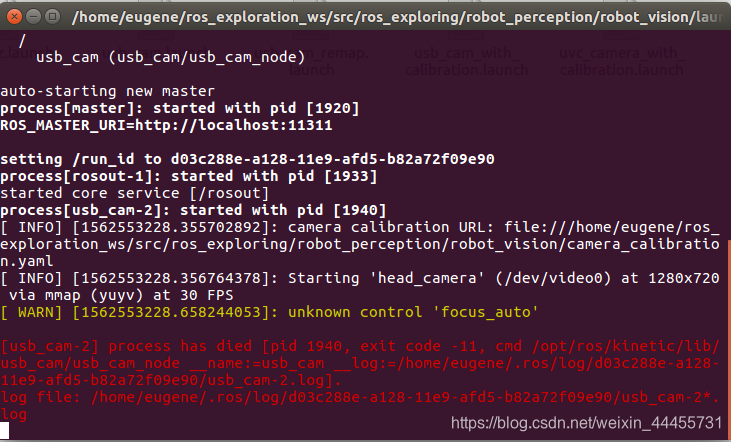 这个鸟问题困扰我好几天,各种百度google也没找到靠谱的解决办法,后来自己反复看胡大神的源代码,原来是这个鸟文件出了问题:
这个鸟问题困扰我好几天,各种百度google也没找到靠谱的解决办法,后来自己反复看胡大神的源代码,原来是这个鸟文件出了问题:
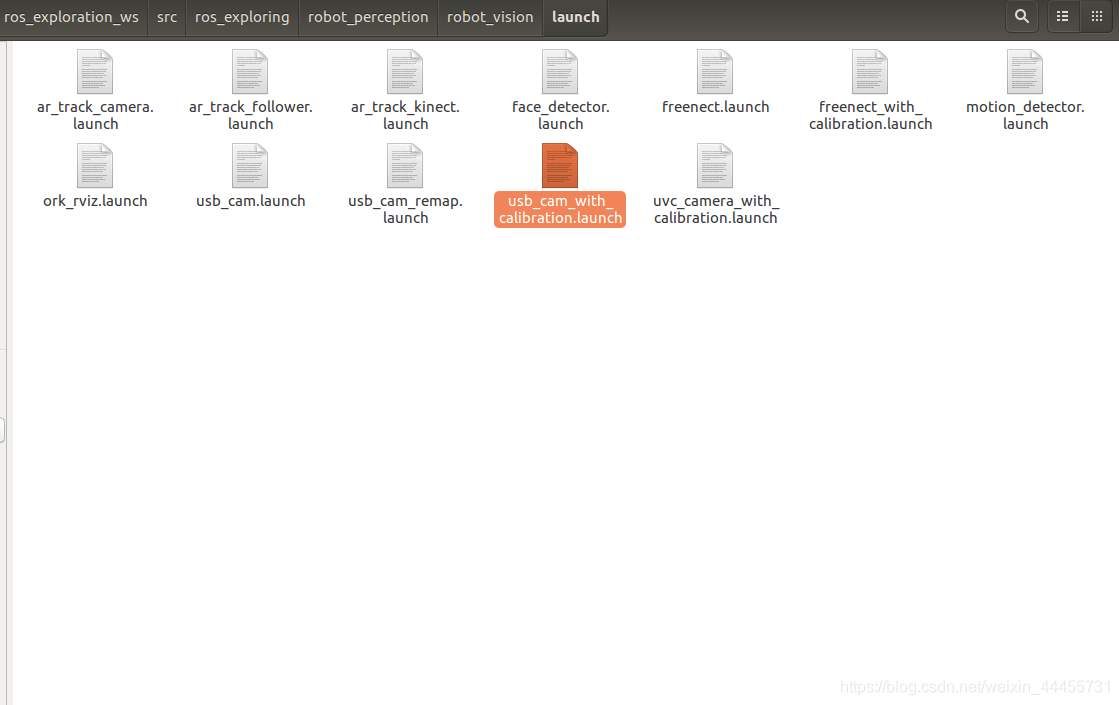 就是发黄的那个鸟(usb_cam_with_calibration.launch)
就是发黄的那个鸟(usb_cam_with_calibration.launch)
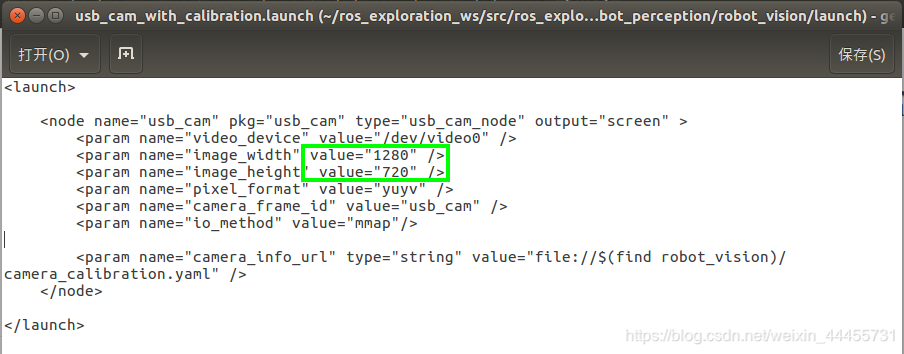 以楼主的第6感(灵不灵不知道)此处似乎存在端倪,因为usb_cam.launch文件的内容
以楼主的第6感(灵不灵不知道)此处似乎存在端倪,因为usb_cam.launch文件的内容
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1815
1815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









