







目录
1. 介绍
发Phase-shifting projected fringe profifilometry (PSPFP)(移相投影光栅轮廓测定法)是为了检查粗糙的工程表面三维表面轮廓的一个强大的工具[1-7]。采用相移检测方案,即使在图像噪声过大的情况下,也能在数万个视场中获得更好的精度。在许许多多表面测量应用中,PSPFP有以下几个值得注意的优势,分别是非接触型、全区域测量能力、表面高采样密度、低环境脆弱性。
非远心PSPFP系统由于其处理相对较大的视场的能力而被广泛使用[8]。 然而,还没有系统的方法用来准确地描述这类系统中的非线性相位-深度关系。相位-深度转换中的不确定性会导致最终的测量误差并且在很多情况下变成限制因素[9]。测试对象的横向几何结构很有用,因此还有一种情况发生了。在PSPFP的主要形式中,只能精确确定采样表面点的深度位置,而不是其横向位置[1,8]。在许多以前报道的作品中,图像横向几何学常被用来近似物体的横向几何。不幸的是,对于大多数现成的相机来说,当成像系统承受相当大的失真时,这种方法失败了。在不解决这些问题的情况下,PSPFP的使用仅限于简单的是通过还是故障的检查。
造成上述问题的原因可能是由于PSPFP最初不是为了精确、绝对的形状测量而开发的。最近报道了一些结合照相测量法和PSPFP技术的方法来试图解决这些问题[10-14]。这些技术主要基于照相测量法的理论框架并且需要至少两个照相机或两个投影仪。所以它们的适用性被限制在所测量的区域必须同时对照相机和投影仪都可见的应用中。当系统紧凑性成为关键设计准则时,双摄像机或双投影仪配置也是不优选的。当然,可以使用减小三角角度来缓解这两个问题。但是这将付出降低测量灵敏度的成本。
本文提出了一种精确的基于定标的相移测量方案,用于确定物体的绝对形状。它采用传统的单摄像机和单投影仪配置,使测量具有更高的灵活性,在硬件实现上更紧凑。在直接类似于双平面校准方案的情况下,该技术针对每个检测位置单独地表征系统失真。这种方法有效地考虑了局部失真效应,因此可能比依赖于全局系统模型的那些更精确。估计系统参数需要线性优化来保证数值解的稳定。最后,校准过程的系统模型包含检测平面不垂直于成像透镜的光轴的情况。这使得目前的技术特别适用于某些特殊配置的测量系统,如精密齿轮测量和大规模轮廓检查。
2. 测量原则
2.1 基本定义和假设
图1显示典型非远心PSPFP测量系统中的坐标系。世界坐标系xyz是一个固定的参考系统,用来表示被测物体的形状。检测平面坐标系RC是在CCD检测平面上定义的,轴R和C分别平行于传感器阵列的行和列方向。选择rc坐标系的原点作为左上角像素的中心。摄像机坐标系的原点,UVW,是成像透镜的光心。轴W与成像透镜的光轴重合。光栅坐标系的原点是一个特别标记的点,其中绝对相位被指定为零。光栅位于XgYg平面,边缘垂直于轴Xg。投影仪坐标系的定义简单,因为它与摄像机坐标系的相似性。
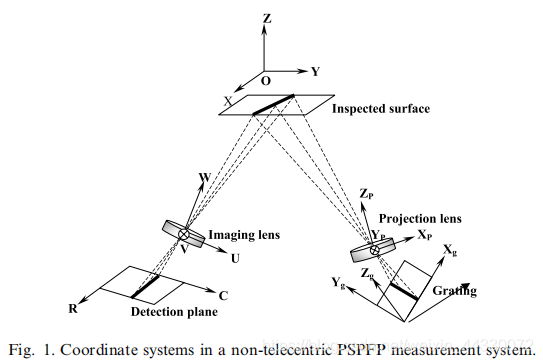
通过应用旋转矩阵和平移向量,点可以从一个参考系统映射到另一个参考系统。例如,检测平面坐标中的点(R,C)由相机参考系统中的(u,v,w)表示,两组坐标将由以下等式决定:
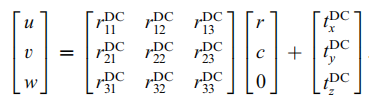
这里,上标的符号D和C分别表示检测平面和相机坐标系。这些符号的顺序表示坐标转换的方向。本公约也适用于今后的讨论。
在上述定义中,CCD检测平面不一定垂直于成像透镜的光轴。光栅平面也不一定垂直于于投影透镜的光轴。当倾斜地观察近的物体时,光栅平面和检测平面通常与物体表面大致共轭。当与物体的深度相比光学系统的景深变得有限时,这是特别必要的。除几何畸变外,假设成像和投影系统的其他像差已事先经过仔细校正。在实践中,这种假设通常是通过关闭相应的镜头来实现的。这样做可以显著地抑制与孔径大小的高阶幂次成比例的像差。图像点是指与主射线检测平面相交的点。为了在使用小孔径时补偿光线,可以增加CCD探测器上的曝光时间。和其它相移位置测量系统中一样,在目标点采样的相位值被假定为等于在其图像点采样的相位值。当正弦条纹被光学系统很好地分辨,并且系统的点扩散函数是对称的时,这个假设就成立了。
2.2 基于标定的移相表面测量
考虑在其中采样的绝对相位为U的世界坐标系中的任意曲面点(x,y,z)。根据上一节中给出的假设,检测平面中的图像点(R,C)处的绝对相位也是相同的。变量r,c,的关系为
, (2.1)
, (2.2)
, (2.3)
,
和
表示依赖于系统的非线性函数。当通过系统标定确定这些函数时,通过对上述非线性方程组的同时求解,可以得到(x,y,z)。等式(2.1)-(2.3)给出轮廓测量的抽象公式。为了实现这样一种方法,我们必须找到将测量量与未知量联系起来的显式约束。
等式(2.1)和(2.2)表示PSPFP系统成像臂的功能。畸变的成像过程通常由以下修正的射影变换来表示[15],
, (3)
,
其中(u,v,w)表示一个扭曲的图像点,,
和
是由畸变引起的图像点的位移。符号W和C分别表示世界坐标系和摄像机坐标系。(在解释
的含义时,应提醒读者注意上述公约。)
对于固定的检测位置,等式(3)左侧的术语变为两个常数。同时求解这些方程,我们可以将x和y表示为z的函数,也就是
,
, (4)
其中系数可以通过繁琐但简单的代数操作来计算。等式(4)示出了所有被成像到固定像素的点位于直线中,并通常被称为像素的视线[16]。从这些点发出的主射线以相同的入射角到达透镜系统的前表面。然后这些射线将遭受一系列相同的折射,并且将从透镜系统的后表面以相同的角度出现。在我们对图像点的定义下,这些点在固定的检测平面上产生相同的图像点。结合等式(2.3)和(4)能直接得到
。 (5)
等式(5)指出,在固定的探测位置上,测量相位只取决于深度位置。在设计合理的测量系统中,
是一个可逆的单调函数。这使得我们可以将深度z表示为测量相位
的函数,
, (6)
其中是
的逆函数,也是单调函数。
现在可以通过结合等式(4)和(6)说明拟议的轮廓测量方案,
,
, (7)
。
根据公式(7),可以通过从与横向坐标无关的中确定
来清楚地找到表面点的未知坐标。因为已经知道
,所以后两个方程可以很容易地从等式(7)的前两个方程中计算出来。通过仔细设计的系统校准,必须在测量前找到
的功能形式和所涉及的所有系数。
值得强调的是的系数和函数形式随检测位置的变化而变化。这是一种非常有效的机制,可以解释局部失真效应。为了简单起见,这里省略了空间依赖性,但是应当理解。
2.3 相位-深度关系
在下一节中,我们将注意力集中在的函数构成。作为分析的第一步,我们在完美投影下推导出理想的相位-深度关系。为了提高逼近精度,还添加了一些解释各种扭曲的纠正术语。
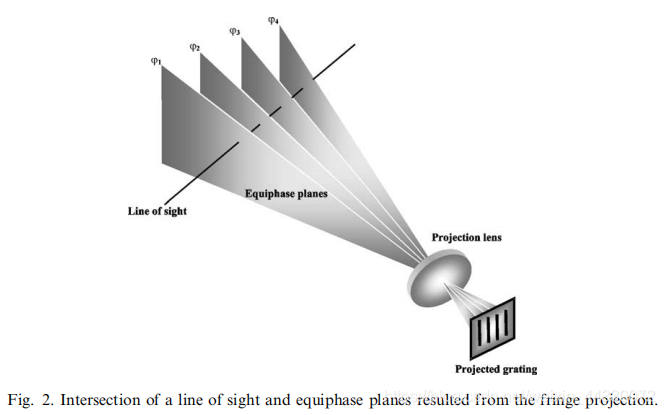
如图2所示&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 512
512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









