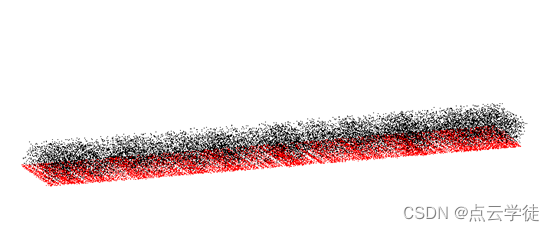
PCL点云处理之添加均匀分布的噪点(详细注释版)(一百八十二) 一、算法简介 二、具体实现 1.代码 2.效果 一、算法简介 PCL中提供了两种不同类型噪点的添加方法,上一章是关于高斯噪点的添加,这一章讲述关于均匀分布噪点的添加,添加结果如下: 红色点为原始点,黑色点即为格外添加的均匀发布噪点 二、具体实现 1.代码 代码如下(示例): #include <iostream> #include <pcl/io/pcd_io.h>










 本文介绍了如何使用PCL库在点云数据中添加均匀分布的噪点。首先,概述了算法的基本原理,接着通过示例代码详细展示了具体的实现过程,并给出了添加噪点后的效果,原始点云与新增的均匀分布噪声点清晰可辨。
本文介绍了如何使用PCL库在点云数据中添加均匀分布的噪点。首先,概述了算法的基本原理,接着通过示例代码详细展示了具体的实现过程,并给出了添加噪点后的效果,原始点云与新增的均匀分布噪声点清晰可辨。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 221
221

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








