







 本文介绍了计算机视觉中的图像多视图几何基础,包括对极几何概念、基础矩阵的计算以及8点法和7点法求解实例。实验部分通过不同场景展示了如何应用这些理论进行基础矩阵的估算,强调了噪声影响和坐标归一化的必要性。
本文介绍了计算机视觉中的图像多视图几何基础,包括对极几何概念、基础矩阵的计算以及8点法和7点法求解实例。实验部分通过不同场景展示了如何应用这些理论进行基础矩阵的估算,强调了噪声影响和坐标归一化的必要性。
1. 基本概念
1.1 对极几何
对极几何是指空间中的某一点和它的投影在不同坐标系下的表示。
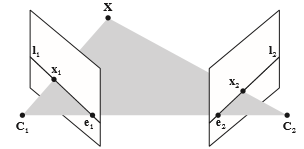
两个白色平面为相机成像的像平面, x x x为空间中的任意一点,从图中可以看出, X X X 在左边像平面的投影为 x 1 x_{1} x1,在右边像平面的投影为 x 2 x_{2} x2, C 1 C_{1} C1和 C 1 C_{1} C1分别是两个相机的光心,而且 C 1 C_{1} C1, C 2 C_{2} C2, x 1 x_{1} x1,x, x 2 x_{2} x2在同一平面上,将该平面命名为 π π π,该平面有一条基线,为线 C 1 C_{1} C1 e 1 e_{1} e1 e 2 e_{2} e2 C 2 C_{2} C2。包含基线的平面叫做对极平面,基线与像平面的交点为对极点( e 1 e_{1} e1, e 2 e_{2} e2),对极平面和像平面的交点称为对极线( l 1 l_{1} l1, l 2 l_{2} l2)。
1.2 基础矩阵
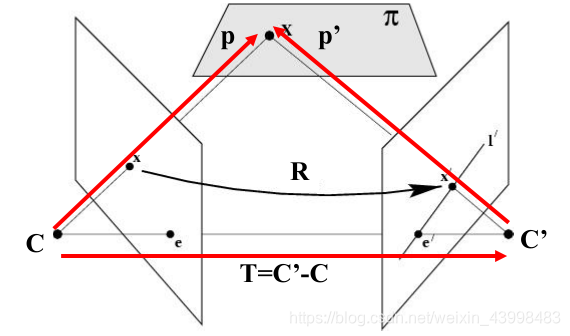
基础矩阵所包含的参数由相机内参(K),两个相机外参(R,T),可以用来描述图像的对应关系,也就是说我们知道了某个点在一个像平面的坐标,可以知道它在另一个像平面的坐标。
p p p, p ′ p^{'} p′是x在 C C C, C ′ C^{'} C′两个像平面的相对坐标,则:
p = R p ′ + T p=Rp^{'}+T p=Rp′+T
其中,
x = K p x=Kp x=Kp x ′ = K ′ p ′ x^{'}=K^{'}p{'} x′=K′p′
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2076
2076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









