







 本文介绍了相关性扫描匹配(CSM)在激光SLAM中的应用,包括构建局部地图、计算匹配得分和协方差,以及如何通过分支界定技术进行效率提升。后续会深入探讨分支限界在优化匹配过程中的作用。
本文介绍了相关性扫描匹配(CSM)在激光SLAM中的应用,包括构建局部地图、计算匹配得分和协方差,以及如何通过分支界定技术进行效率提升。后续会深入探讨分支限界在优化匹配过程中的作用。
一家之言,仅作分享,如有不合理或需要改进的地方,欢迎各位讨论。
前言
作者在先前激光SLAM项目中借鉴的是karto中的匹配方法相关性扫描匹配,在google的cartographer中的前端匹配方法也是相关性扫描匹配,但是利用了分支界定进行了加速。这篇博客将对CSM与分支界定进行介绍分享。
一、相关性扫描匹配
1、ScanMatch流程图
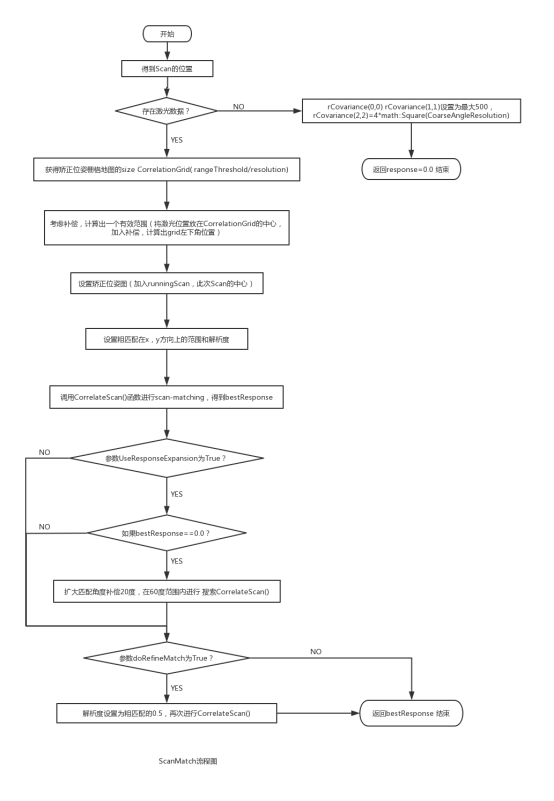
2、匹配过程
匹配思路其实十分简单,就是将历史点云数据构建为一个参考栅格地图,再将当前激光雷达摆放在栅格地图上(遍历位置与角度),哪一个摆放位姿下的当前点云与参考栅格地图匹配得分最高,那个位姿就是估计的位姿。
2.1、构建局部地图
扫描匹配的方式是 S c a n T o M a p ScanToMap ScanToMap,其中 s u b m a p submap submap是一个grid坐标系中的矩形区域。
- 取当前帧激光传感器的位置信息,即里程计估计的值。
- 以当前帧激光传感器的位置为中心,构建一个矩形栅格地图。
- 将历史帧中的激光点云坐标转换后投影在该栅格地图中。
2.2、计算匹配得分response
- 以一定的角度分辨率和角度偏移值,建立一张角度偏离量查找表格, 获取不同角度偏移量下,每帧激光的每束激光相对于中心点位置的坐标。这样做是避免三角函数重复计算,减少计算量。
- 对角度和二维的平移值,设置搜索范围与搜索分辨率,粗匹配时计算位置协方差;使用粗匹配输出的坐标均值再次进行精匹配,设置搜索范围与分辨率,精匹配时计算角度协方差。
- 相应值 r e s p o n s e response response的计算:即当前scan在参考栅格地图的占用值的平均值。
- 如果多个位姿的响应值达到阈值要求,求其平均值。
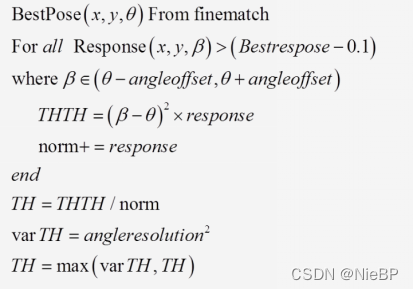
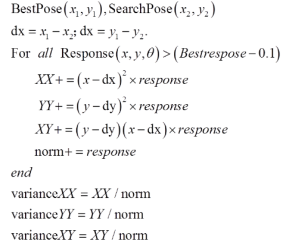
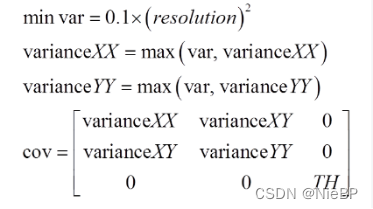
2.3、计算匹配协方差
计算角度协方差
计算位置协方差
协方差矩阵
二、分支限界
(最近比较忙,后面更新补充进去)

















 4992
4992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









