






 本文介绍了如何使用鱼香ros的安装脚本一键安装rosdepc,解决rosdep更新问题,并提供了mavros的二进制安装步骤,包括GeographicLib库的安装和权限设置,以解决常见报错和连接问题。
本文介绍了如何使用鱼香ros的安装脚本一键安装rosdepc,解决rosdep更新问题,并提供了mavros的二进制安装步骤,包括GeographicLib库的安装和权限设置,以解决常见报错和连接问题。
使用鱼香ros安装rosdepc
wget http://fishros.com/install -O fishros && . fishros
在终端界面中按照提示,选择一键安装rosdepc那一项对应的数字,输入回车,会自动下载和完成rosdep init的工作 3、更新。执行以下命令
rosdepc update
大功告成。以后有使用到rosdep的命令,都要记得换成rosdepc才对。
如果rosdepc update 提示“ rosdepc update ERROR: error loading sources list:”
## 一个超级简单使用的方法:**简单粗暴 ### sudo vim /etc/hosts #### 在最下面添加一句这个: #### #### 151.101.84.133 raw.githubusercontent.com
解决找不到命令roscd的问题
解决找不到命令roscd的问题
跟着ros官方教程学习的时候,遇到了这样的报错:

在命令行安装,并重新编译 source后:
sudo apt-get install ros-noetic-rosbash 1
问题解决:

mavros安装
二进制安装
# 1.安装mavros,根据自己的ros版本进行修改 sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras # 2.安装GeographicLib依赖库安装 wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh ./install_geographiclib_datasets.sh # 3.测试安装是否成功 roscd mavros # 查看飞控端口 ll /dev/ttyACM* # 添加权限 sudo chmod 777 /dev/ttyACM0 # 启动节点 roslaunch mavros px4.launch fcu_url:=/dev/ttyACM0:57600
另:来自知乎

https://zhuanlan.zhihu.com/p/599917063
我们安装完ROS后,要进行如下两个操作:
sudo rosdep init
rosdep updaterosdep能帮助我们安装ROS包所需要的依赖,然而执行的时候,通常会出现:

这个问题来源是大陆的DNS污染,我们首先要手动更改域名解析:
打开https://site.ip138.com/ ,输入raw.githubusercontent.com,查询其IP地址:

打开一个终端,输入:
sudo vim /etc/hosts在文件最后的末尾添加:
185.199.110.133 raw.githubusercontent.com当然,换成185.199.110.133或者185.199.109.133都可以
保存退出,再执行:
rosdep init如果还是访问不了的话,那我们手动进行rosdep init的操作:
用电脑访问https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list ,可看到如下界面:

我们复制一下如下这几行,
# os-specific listings first
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead之后在终端中输入:
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
cd /etc/ros/rosdep/sources.list.d/
sudo vim 20-default.list把前面复制的内容粘贴进去,这实际上就完成了rosdep init的操作
之后执行:
rosdep update通常情况下,会出现:

我们使用域名代理的方法进行解决
执行:
sudo vim /usr/lib/python2.7/dist-packages/rosdistro/__init__.py在第68行的https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml前面加上https://ghproxy.com/

执行:
sudo vim /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py在第34行的https://raw.githubusercontent.com/ros/rosdistro/前面加上https://ghproxy.com/

执行:
sudo vim /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py在第64行的https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list前面加上https://ghproxy.com/

同一个文件,在第301行中添加:url="https://ghproxy.com/"+url

执行:
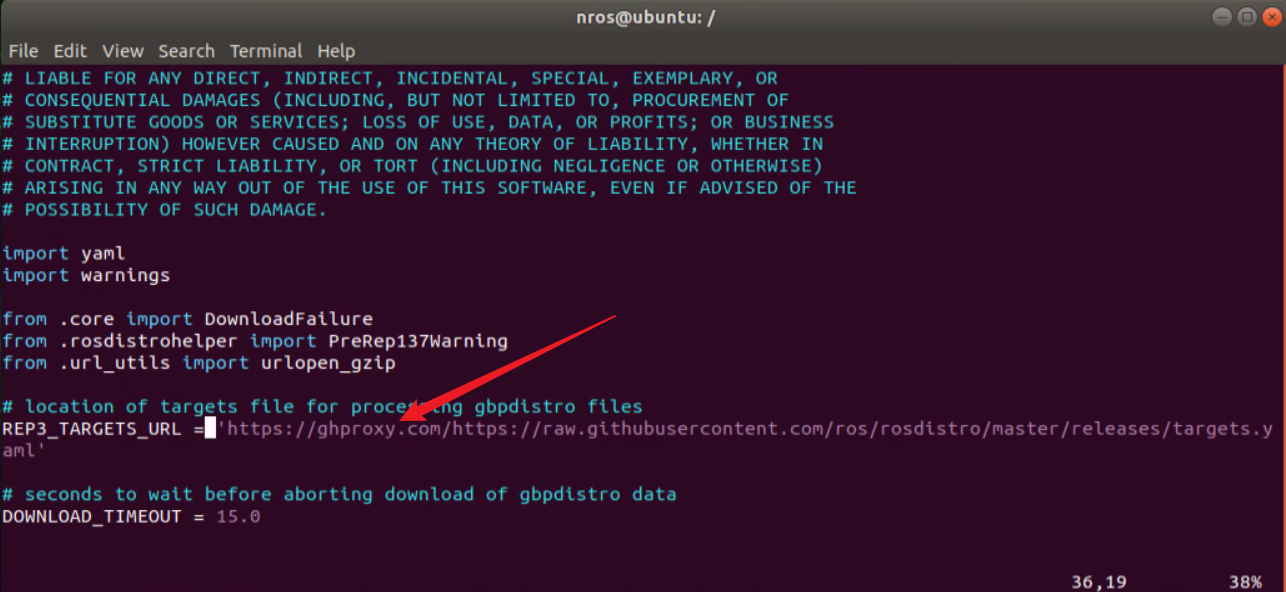
sudo vim /usr/lib/python2.7/dist-packages/rosdep2/rep3.py在第36行的https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml前面加上https://ghproxy.com/
执行:
sudo vim /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py在第68行的https://raw.githubusercontent.com/%s/%s/package.xml前面加上https://ghproxy.com/

同一个文件,在第119行的https://raw.githubusercontent.com/%s/%s/%s前面加上https://ghproxy.com/

之后再执行:
rosdep update可以看到成功执行,至此ROS完美安装成功

















 4018
4018

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









