







 文章探讨了一种避障控制策略,通过在CarSim中模拟车辆的自然滑行减速度,设置驱动和制动的过渡区以减少频繁切换。对比了使用汽车理论行驶方程直接控制与带缓冲区的控制方法,展示了不同加速度条件下的仿真效果,显示出较小的误差值,证明了该方法的有效性。
文章探讨了一种避障控制策略,通过在CarSim中模拟车辆的自然滑行减速度,设置驱动和制动的过渡区以减少频繁切换。对比了使用汽车理论行驶方程直接控制与带缓冲区的控制方法,展示了不同加速度条件下的仿真效果,显示出较小的误差值,证明了该方法的有效性。
传统及主流的纵向控制切换算法:
例如《某避障控制策略研究》硕士论文:
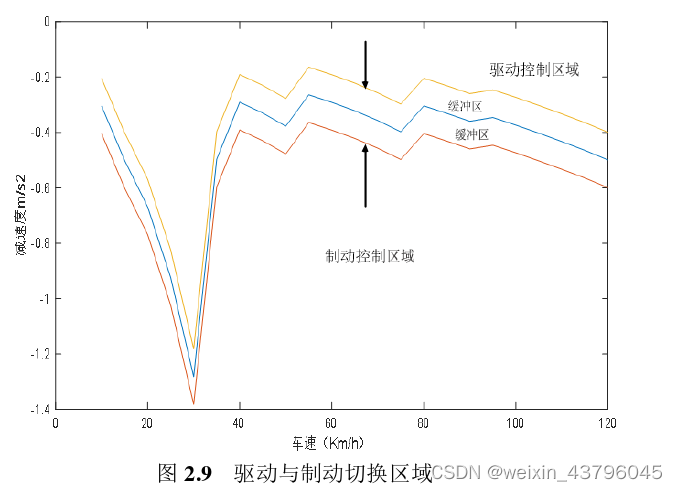
- 在CarSim中设定节气门开度及制动踏板力为0,测得不同车速工况下车辆自然滑行的减速度。为了避免在控制过程中车辆驱动与制动切换的过于频繁,在其两侧设置了宽度为Δh的过渡区,当加速度𝑎>𝑎0+𝛥h,为驱动控制,节气门起作用;当𝑎<𝑎0−𝛥h为制动控制,制动器起作用;𝑎0+𝛥h>𝑎>𝑎0−𝛥h为滑行状态。图2.9中间线条为在不同车速条件下测得的车辆自然滑行的减速度,两侧线条为驱动控制区域与制动控制区域的边界。
- 在撰写过程中我就存在一个疑惑,为什么要用这个带档滑行的,直接用
汽车理论的行驶方程: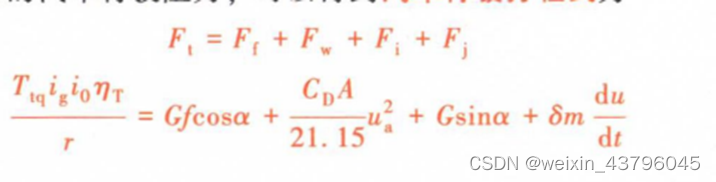
会导致误差很大吗?当等式右边大于0控发动机;等式右边小于0控行车制动,Carsim及Trucksim可以控发动机扭矩不仅仅是可以控开度,为了不使加减速频繁切换,也可以做一个0.01即Δh加速度的偏移量,跟图2.9类似,不知大家是否有同样的疑惑。
按照汽车理论行驶方程搭建:
等式右边小于0控制动,右边大于0控发动机
进行一系列调参,效果怎么样呢,大家请看效果图:
-
加速时: 期望加速度0.5,初始车速50km/h
中间三段波动较大的是因为换挡,计算的扭矩突然增加。 -
加速度是0.2,初始车速同上,效果图如下:
较小的误差值。 -
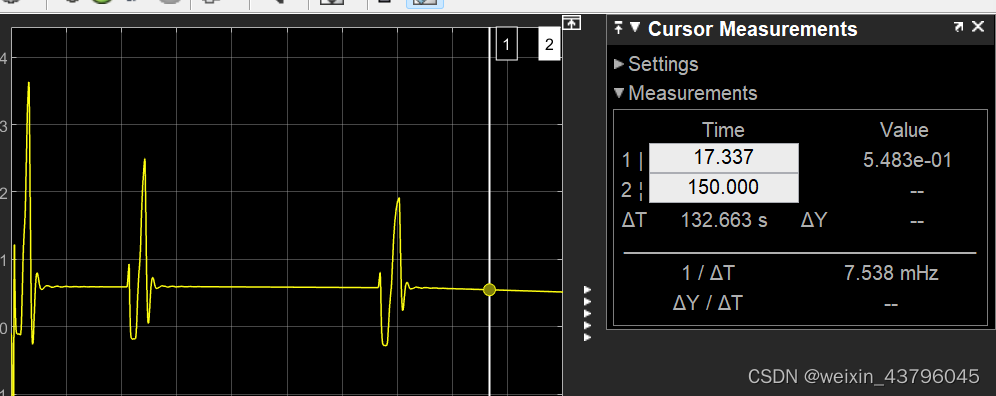
减速度是-1时,初始车速同上,效果图如下:
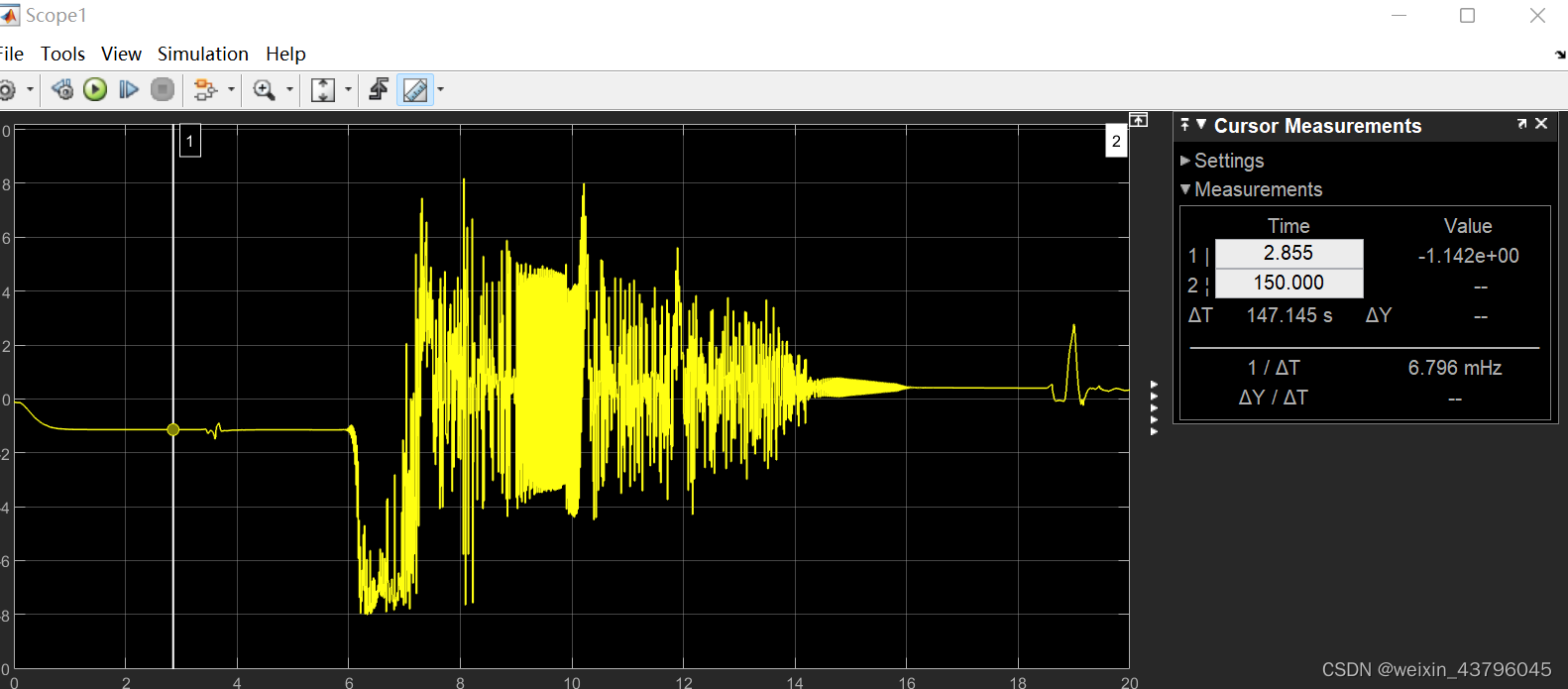
可以看出误差非常小,后面是车刹停了,加速度有较大跳跃。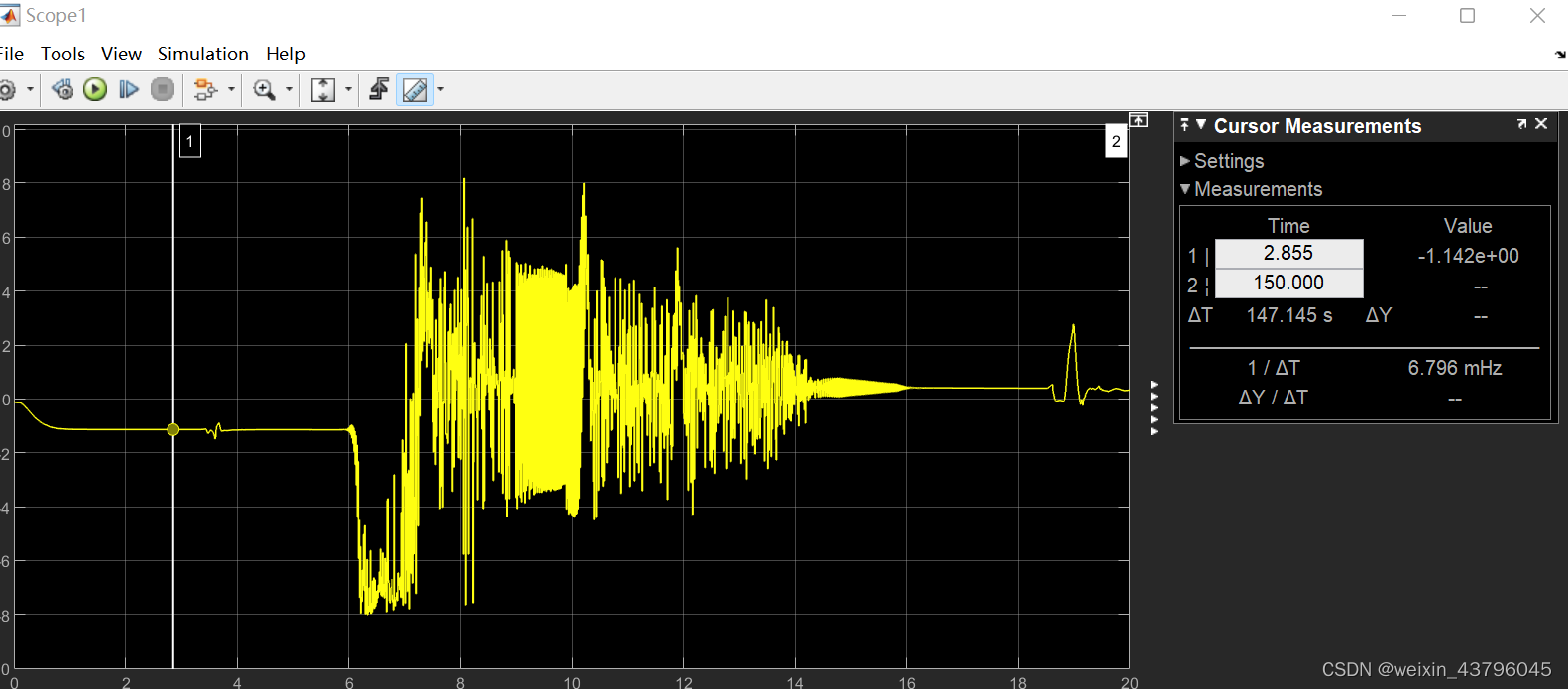
-
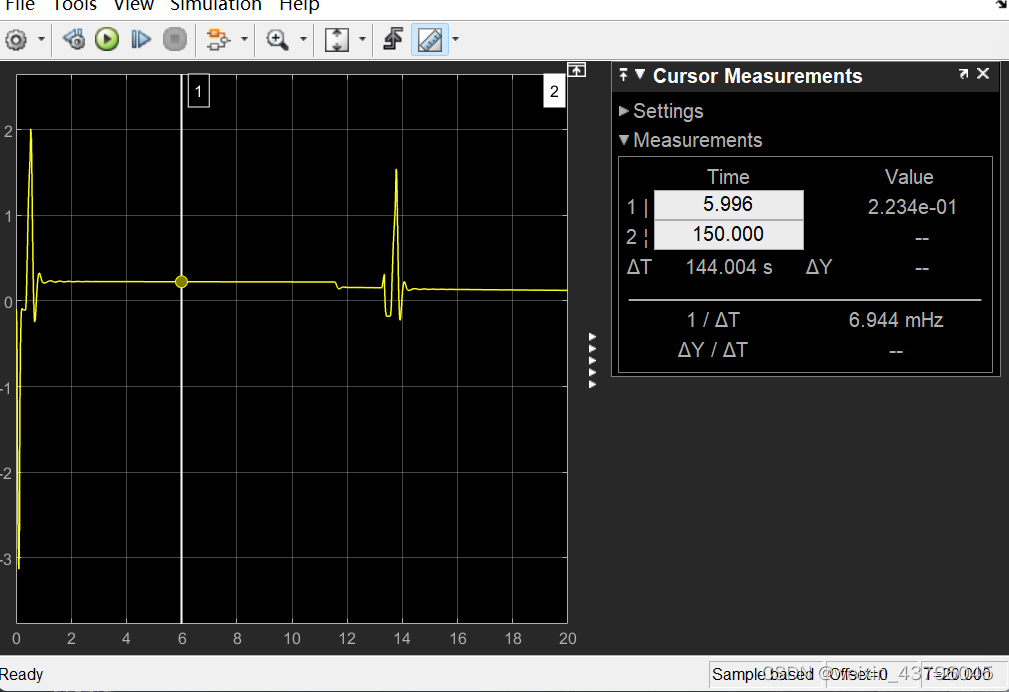
减速度是-3时,初始车速同上,效果图如下:
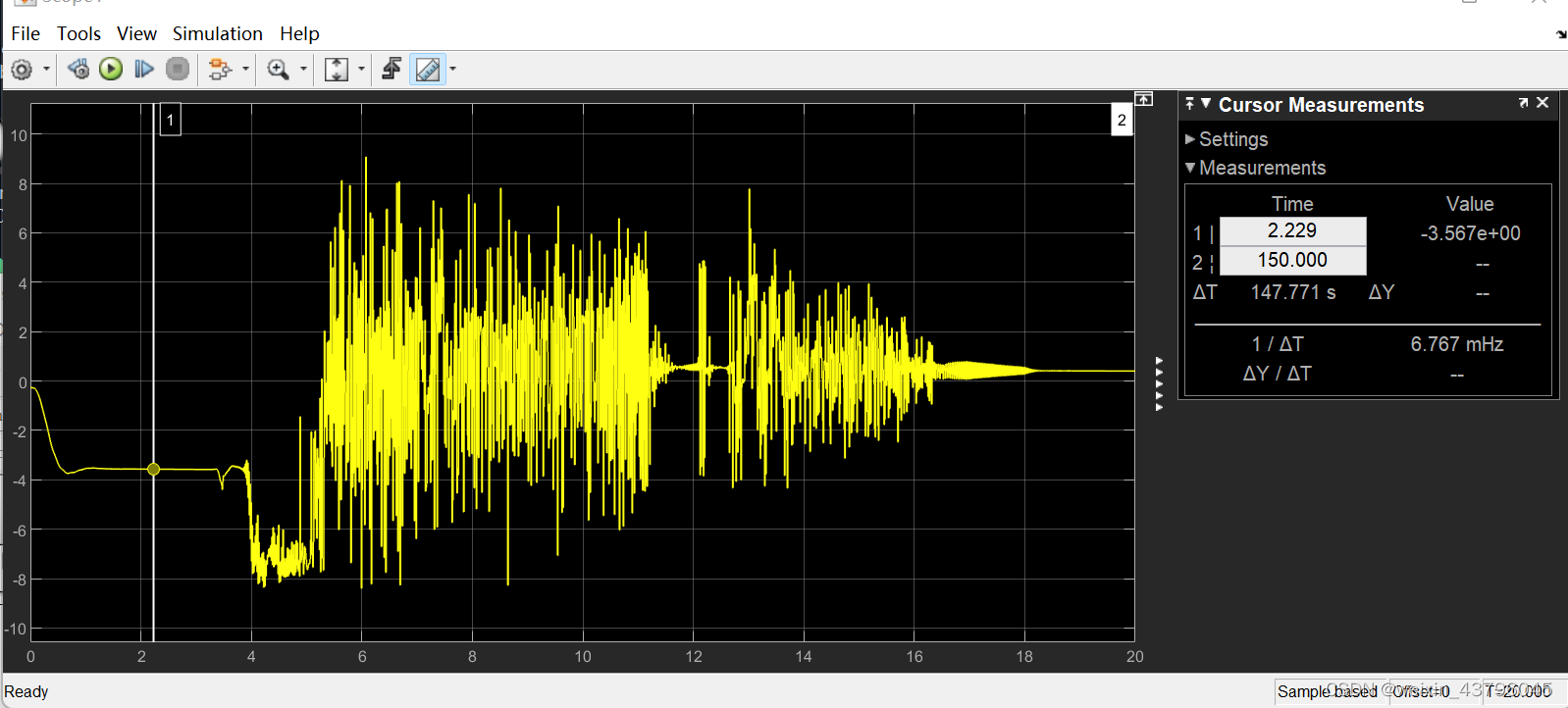
大概是有0.5的误差,因为是开环的我认为已经很好了。


















 1348
1348

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











