






 PointNet利用Tnet实现旋转不变性,并通过全连接层构建置换不变性,强调主干点在上采样中的作用。而PointNet++则针对PointNet的最大池化问题,解决了局部点间联系的建模难题。
PointNet利用Tnet实现旋转不变性,并通过全连接层构建置换不变性,强调主干点在上采样中的作用。而PointNet++则针对PointNet的最大池化问题,解决了局部点间联系的建模难题。
https://blog.youkuaiyun.com/limingmin2020/article/details/123630112
一、PointNet
通过Tnet来构建点云的旋转不变性,通过全连接层来构建点云的置换不变性
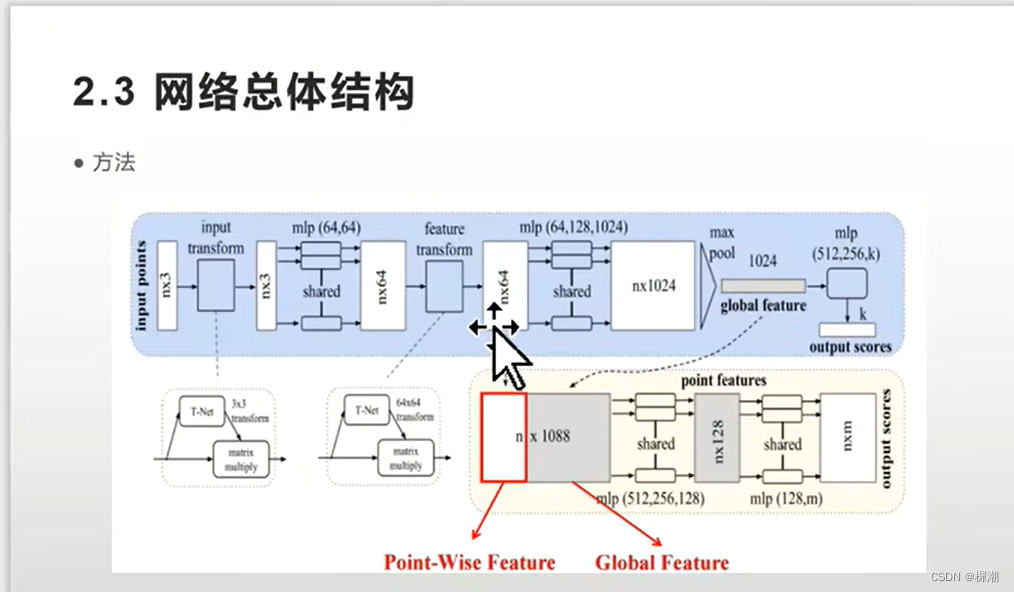
发现主干点的作用明显,主干点再上采样。
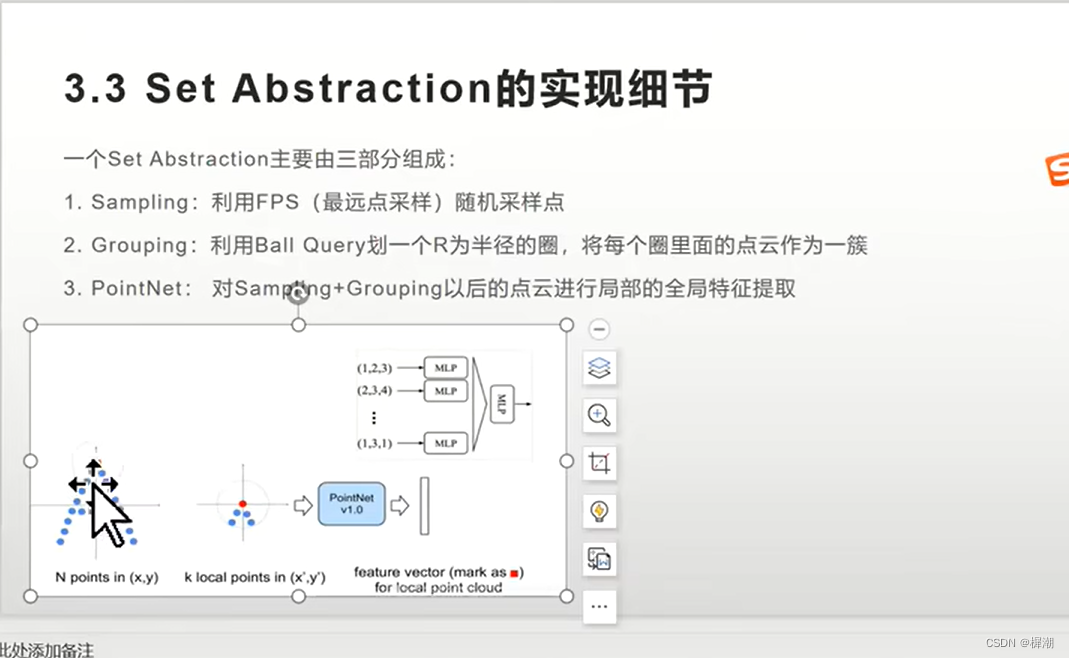
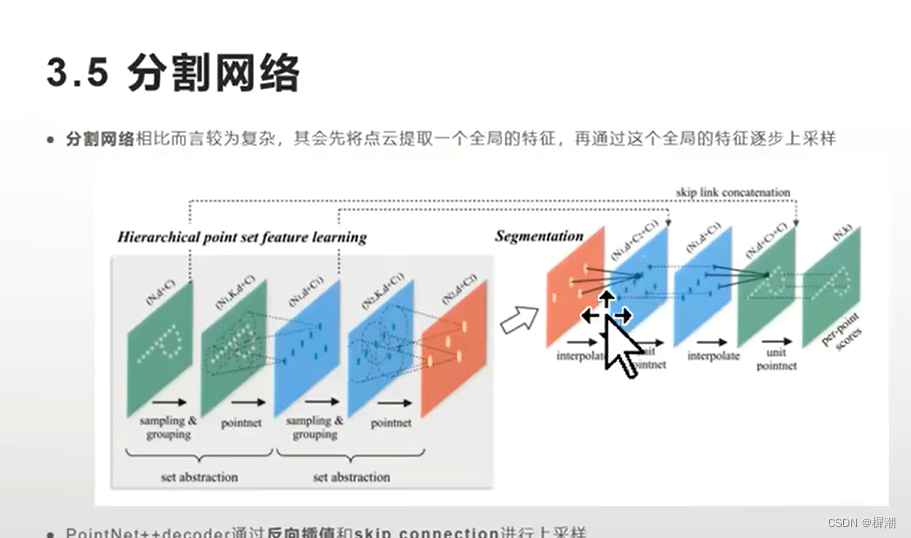
二、PointNet++
主要解决PointNet最大池化导致局部点之间的联系无法建模问题。
https://blog.youkuaiyun.com/limingmin2020/article/details/123630112
一、PointNet
通过Tnet来构建点云的旋转不变性,通过全连接层来构建点云的置换不变性
发现主干点的作用明显,主干点再上采样。
二、PointNet++
主要解决PointNet最大池化导致局部点之间的联系无法建模问题。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























