






PCRLB(后验克拉美罗下界)具有预测能力,能够通过递推的形式进行计算, 能为下一时刻的目标状态估计误差提供下界, 因此常被用作运动目标跟踪误差的评价准则。
用量测信息对目标状态向量
进行估计时, 其无偏估计量
与目标状态向量间必须满足:
![]()
表示 k 时刻目标 q 的 PCRLB, 即关于
的Fisher 信息矩阵(FIM, Fisher Information matrix)的逆。 FIM 可计算如下:
![]()
表示状态向量与量测向量的联合 PDF:
![]()
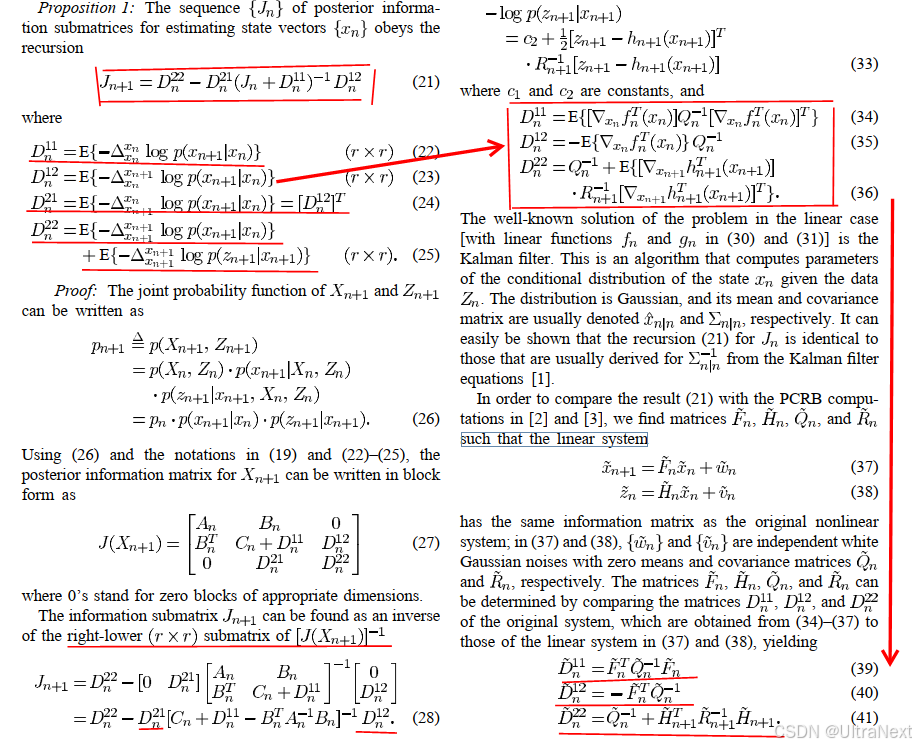
k 时刻关于目标 q 的 FIM 的递推式可计算为:
这部分的参考文献如下:
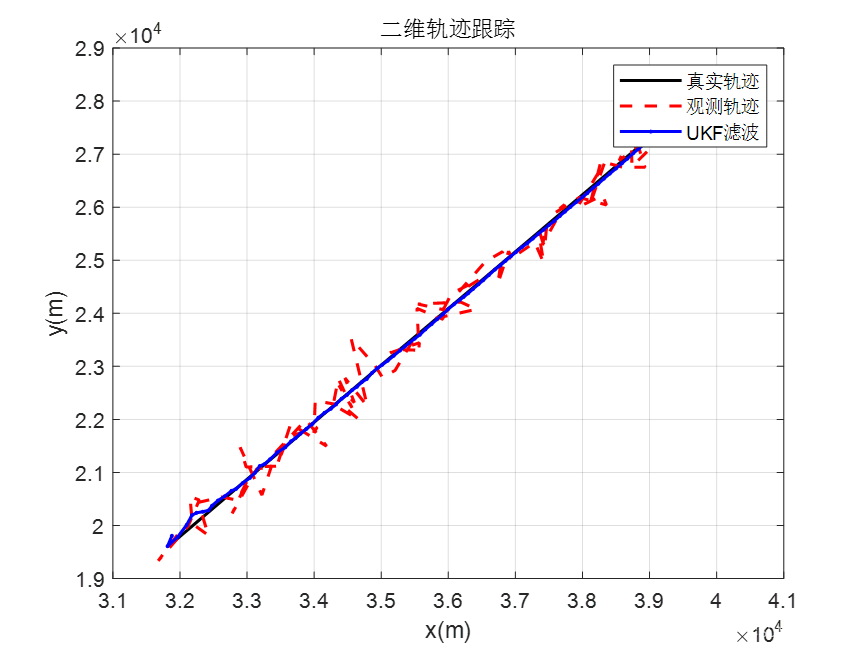
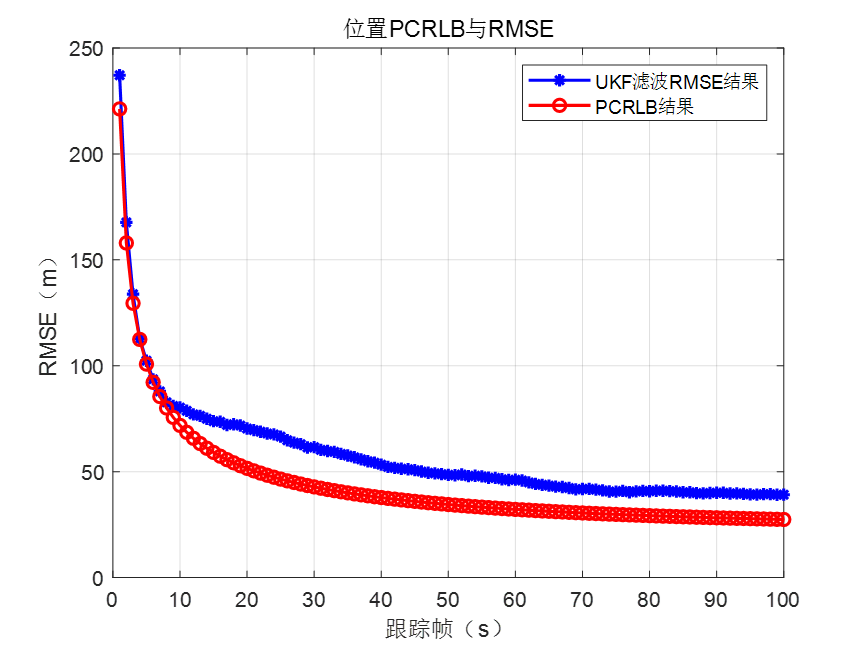
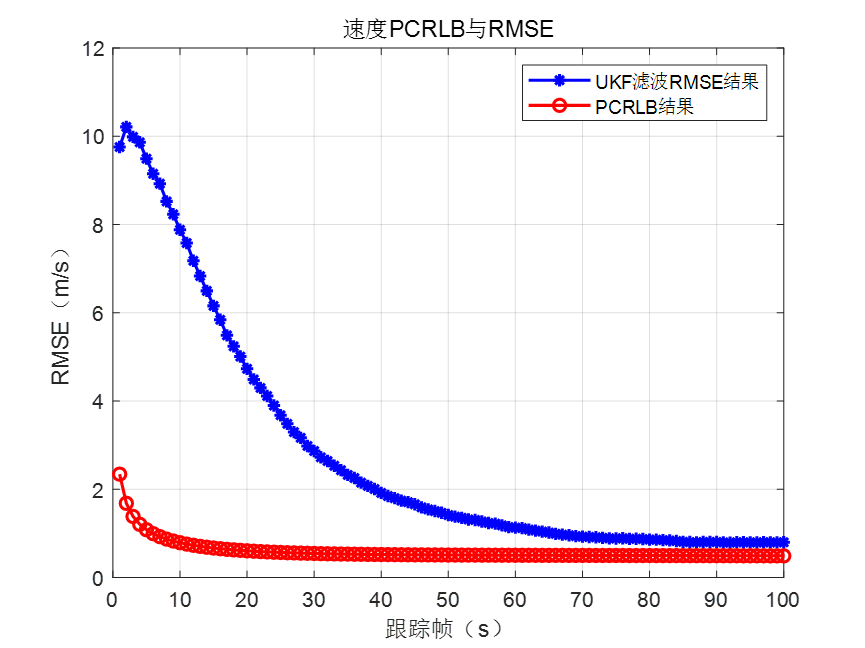
本博客通过MATLAB对上述过程进行代码实现,通过UKF(无迹卡尔曼滤波)对目标状态进行跟踪滤波,并从仿真图中可以看到目标跟踪的位置RMSE与速度RMSE能够逐渐收敛到跟踪的PCRLB。仿真结果分别如下:
主要代码如下:
%% 参数定义
sV=zeros(n,N,MC,1); % 真实状态
eV=zeros(n,N,MC,chan); %状态估计
PV=zeros(n,n,N,MC,chan);
rV=zeros(3,N,MC,M);
for i=1:MC
x=[30000,80,20000,80]'; %初始状态变量
P_0=diag([1e6,1e2,1e6,1e2]); %初始方差
%滤波器初始化
xk_UKF=x; Pk_UKF=P_0; % UKF单雷达滤波
x0=mvnrnd(x,P_0); % 初始状态
%x0=(x+normrnd(0,0.001)')';
x=x0';
for k=1:N
%% 目标运动学模型,匀速运动CV模型
w=sqrtm(Qk)*randn(4,1);%过程噪声
x=Fk*x+Gk*w;
sV(:,k,i,1)=x;
%% radar measuremnt
for m=1:M
v=normrnd(v_mu,[sigma_r(m); sigma_b(m);sigma_d(m)]);
% 两个雷达测量
[r,b,d] = measurements3(x,xp(:,m)); %rm=距离,bm=角度 dm=多普勒速度
rm=r+v(1);
bm=b+v(2);
dm=d+v(3);
rV(:,k,i,m)=[rm,bm,dm]';
end
% UKF
[xk_UKF,Pk_UKF] = fun_3UKF(xk_UKF,Pk_UKF,Fk,Gk,rV(:,k,i,1),Qk,sigma_r(1),sigma_b(1),sigma_d(1),xp(:,1));
PV(:,:,k,i,1)=Pk_UKF;%滤波方差
eV(:,k,i,1)=xk_UKF;%滤波估计值, 1表示滤波结果
% PCRLB
[d11,d12,d22] = fun_pcrlbfusion(x,Fk,Gk,Qk,sigma_r,sigma_b,sigma_d,xp);
d11_pcrlb(:,:,k,i)=d11;
d12_pcrlb(:,:,k,i)=d12;
d22_pcrlb(:,:,k,i)=d22;
end
end
%雅可比矩阵
Hk= [H11 0 H12 0 ;
H21 0 H22 0 ;
H31 H34 H32 H35 ];
%Fisher信息矩阵分量
-----------------此处省略-------------------如有代码问题,请加V(UltraNextYJ)交流。


















 299
299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











