







- 在工作空间创建功能包:
catkin_create_pkg learning_service roscpp rospy std_msgs
注:learning为包名,roscpp rospy std_msgs为依赖
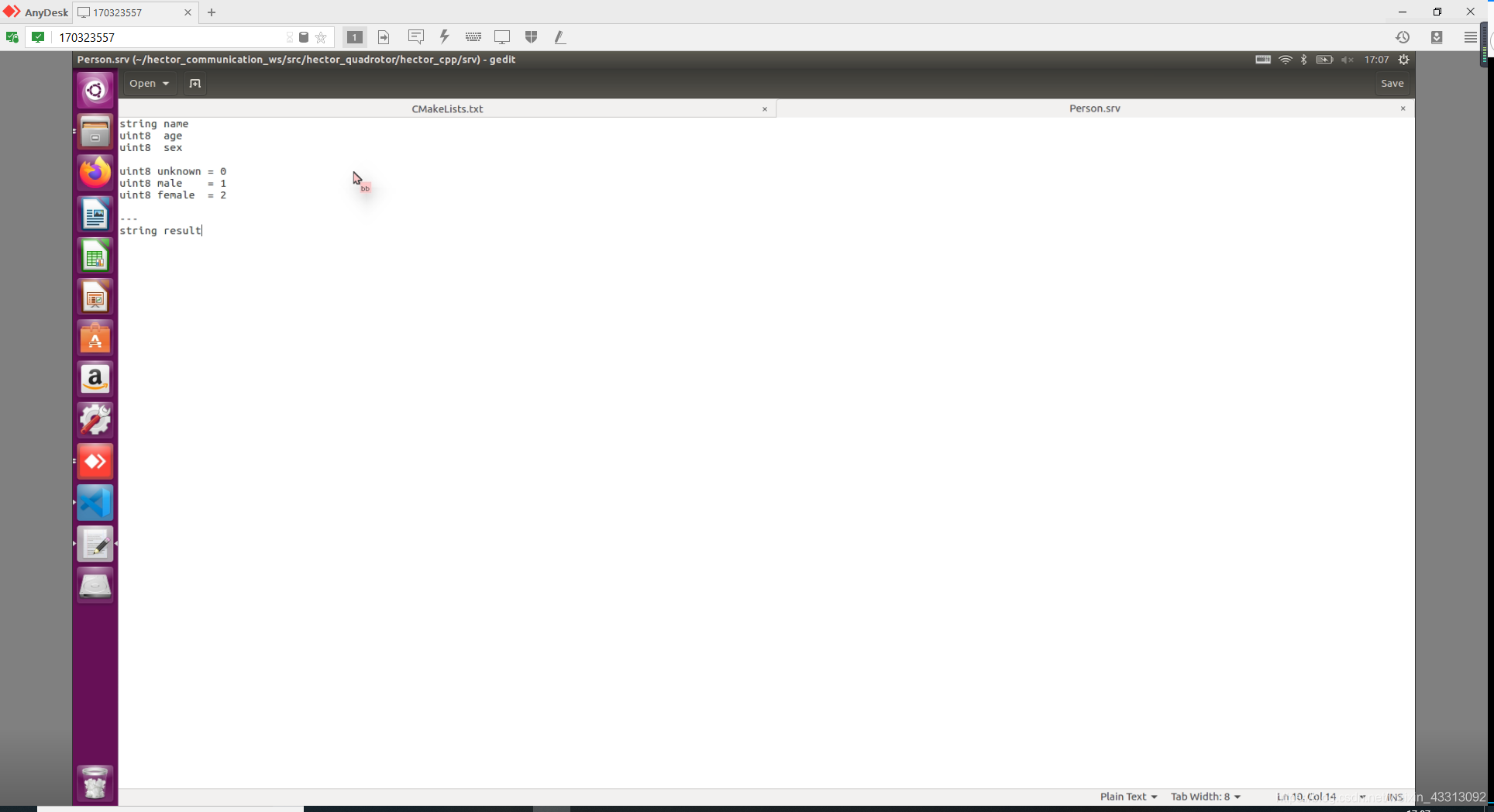
2. 在创建的包中创建srv文件夹,在srv文件夹中创建自定义消息Person.srv:
3. 在创建的包中的package.xml与CMakeLists.txt中添加编译项:
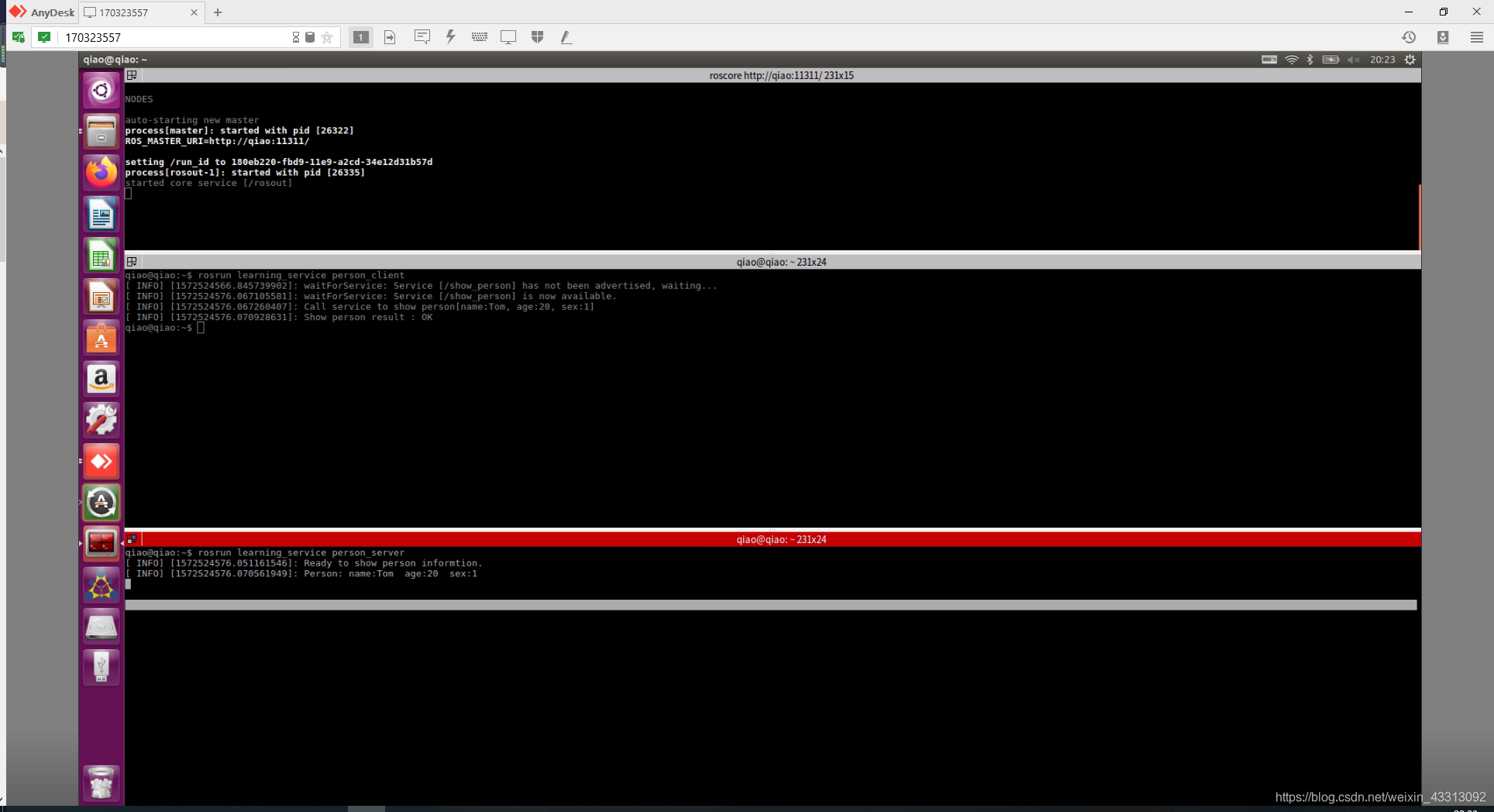
在package.xml添加的依赖:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
在CMakeLists.txt中添加编译项:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
add_service_files(FILES Person.srv)
generate_messages(DEPENDENCIES std_msgs)
catkin_package(
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
)
 4. 回到工作空间下
4. 回到工作空间下catkin_make编译一下。
5. 可以看到在工作空间的devel/include/learning_service下生成了三个文件,将我们的srv消息类型扩展成三个cpp文件。
6. 接着在包中的CMake文件中加入编译规则,设置需要编译的代码和生成可执行文件,设置链接库,添加依赖项:
add_executable(person_server src/person_server.cpp)
target_link_libraries(person_server ${catkin_LIBRARIES})
add_dependencies(person_server ${PROJECT_NAME}_gencpp)
add_executable(person_client src/person_client.cpp)
target_link_libraries(person_client ${catkin_LIBRARIES})
add_dependencies(person_client ${PROJECT_NAME}_gencpp)
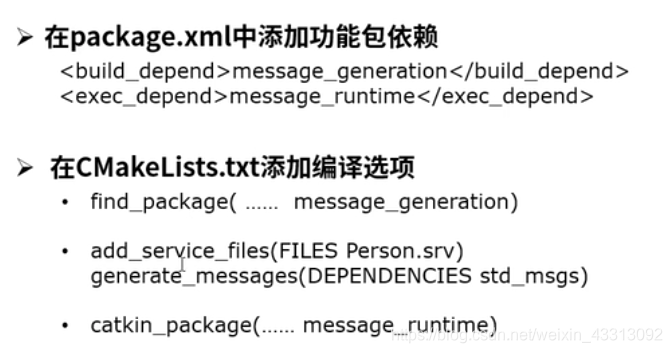
- 回到工作空间下catkin_make会在工作空间下的devel/lib/learning_service下生成了可执行文件。
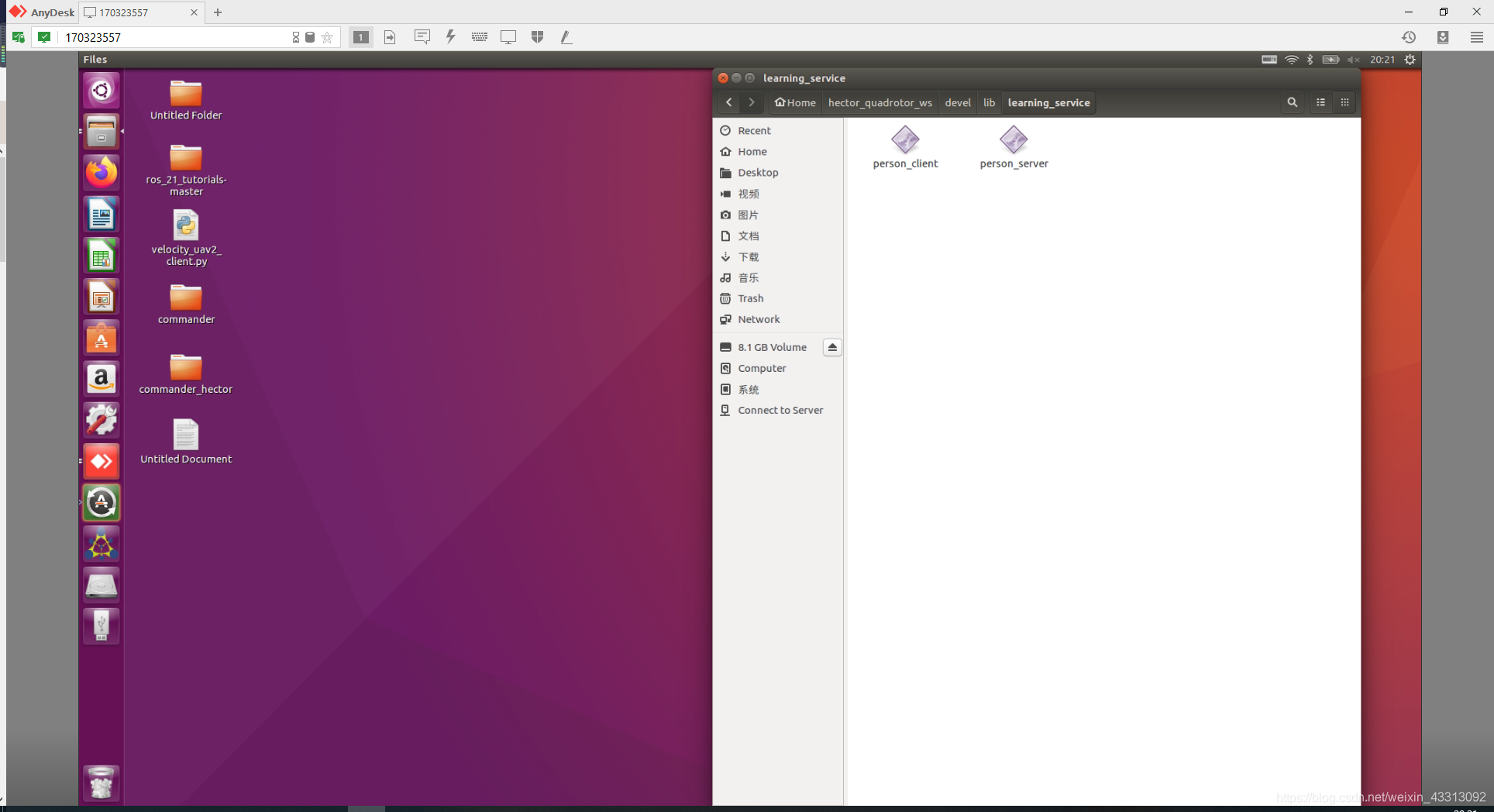 8. 在命令行窗口分别可以看到service服务建立
8. 在命令行窗口分别可以看到service服务建立

















 944
944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









