






想着拿实验室的Dobot magician 来测试自己的算法,测试之前要先确定D435i相对Dobot基座标的位姿矩阵,想着是不是可以弄个程序跑完就出一个位姿矩阵,就有了这几天踩坑的历程,虽然网上有些资源,不过拿来用的时候就各种问题,后面就自己在这些资料中,自己弄了个容易理解的(自认为)。以下主要记录踩坑的填坑过程,方便别人避坑。
一、pipeline:
1.利用realsense2 SDK 编写获取图像数据
2.利用cv2的arocru库,把二维码粘在Dobot末端上。实现相机坐标系下位置坐标数据的获取。
3…dobot 8个位置点的编程(利用API)
4,利用AX=BX求解 ,算出位姿矩阵
二、填坑过程
网上找到了前人做好的一些好资源(https://www.it610.com/article/1175085231611392000.htm),因为想省事,资源是python做的,就直接想用python做了。
1.坑1 dobot python ubuntu 的API 动态链接库找不到
本来想直接在ubuntu里面弄的,不过dobot 的python ubuntu API中的动态链接库怎么都找不到,(如下图 用dobot 论坛其中一个帖子的图)
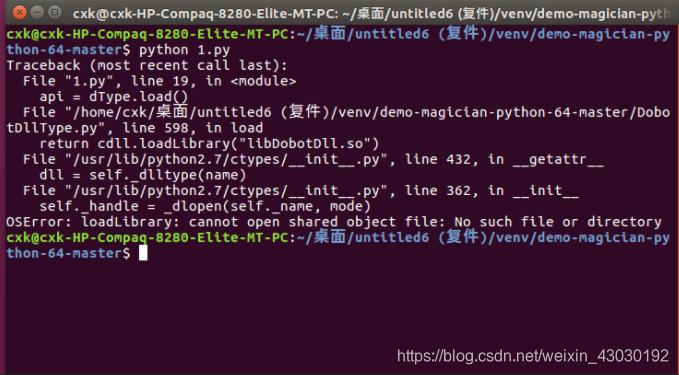
尝试过从dobot官网下载过dobotdll文件夹中的Linux 库的libDobotDll.so,但是不管用,不知道是不是版本的问题,也尝试过用ROS_DEMO里面的libDobotDll.so都不行,扒dobot论坛,好几个帖子都发过这个问题,但都没有官方答复(顺便吐槽一下dobot论坛,几何没什么官方答复),只有个哥们说他后面直接发email给官方要了个so文件,其实ros_demo里面这个so是可以在ros_demo里面用的,也许是版本的问题吧,还有就是ros是有aruco库的,其实可以用ros来弄的,应该也容易,不过这都是后话了,因为就想在别人的树下乘凉就没用ros尝试。后面怎么试都不行,索性改成在win7下弄,就没有这个问题。
2.realsense SDK python版本问题
刚开始没注意版本要求,直接装了python3.8的,结果在pycharm里面装了pyrealsense2库 读取realsense时总直接蹦了,又折折腾腾,各种搜说是只支持3.6的,又刷回3.6的,不过仍然还是闪崩,这是是各种郁闷,想到装的库是不是有问题,就把安装realsense SDK时 顺手安装的库文件 移到 python 3.6下的lib\site-packages 覆盖在pycharm里面装的,结果还真是安装库的问题
3.在跑dobot 程序 向dobot发送指令时,出现非法访问,显示怀疑没有连对端口,可是程序里面连接dobot指令时连接成功的,就一个个式,拿dobot官方的python Demo来跑 是可以跑得通的,就把demo里面的程序复制过来到项目底下新建一个,结果还是非法访问,真是奇葩,只能断点调试进去看,结果发现在调用python API时,demo进的DobotDllType.py 跟我项目里的DobotDllType.py 里面的程序时不一样的,我项目里的DobotDllType.py是用网上github上搜来的(前人做的资源没有这个文件),demo里面是官网下载里包括有的,应该是32位和64位的版本区别吧,就直接把demo里面的这个文件拷贝到我项目里面,终于可以向dobot发送指令了。
4.前人弄的是多线程的,两个线程,没有多线程基础,就自己改成了单线程,下面是代码,没有整理,只是能实现功能。结果如下:
Image_to_Arm
-------------------
Expected: [209, -140, 75]
Result: [ 206.92765176 -139.50130895 75.09675625]
Expected: [205, -92, 64]
Result: [206.15440382 -93.04199169 64.2760236 ]
Expected: [236, 24, 29]
Result: [235.21704529 24.25993536 29.03191212]
Expected: [169, 30, 53]
Result: [168.58617494 30.01540248 53.04496766]
Expected: [262, 41, 7]
Result: [260.72704713 40.56181579 7.35622151]
Expected: [221, 4, 67]
Result: [221.47604745 4.21964259 66.86120285]
Expected: [214, -29, 125]
Result: [215.01937538 -28.88518771 124.78165033]
Expected: [237, -38, -12]
Result: [238.89225425 -37.62830786 -12.44873431]
-------------------
Arm_to_Image
-------------------
Expected: [-0.11113452 -0.04092187 0.37600002]
Result: [-0.11193481 -0.03970785 0.37425096]
Expected: [-0.05280176 -0.03155927 0.377 ]
Result: [-0.05139119 -0.03194701 0.37806281]
Expected: [0.09206092 0.01579761 0.35600001]
Result: [0.09166938 0.0162513 0.35534533]
Expected: [ 0.10412183 -0.04093695 0.40200001]
Result: [ 0.10406784 -0.04067172 0.40165461]
Expected: [0.11099508 0.04827704 0.34300002]
Result: [0.11144238 0.04928318 0.34199833]
Expected: [ 0.06675044 -0.02382139 0.35000002]
Result: [ 0.06651353 -0.02420318 0.35037833]
Expected: [ 0.02369131 -0.07649451 0.32800001]
Result: [ 0.02362968 -0.07724047 0.32881026]
Expected: [0.01647647 0.05169865 0.38300002]
Result: [0.01616295 0.05027507 0.38449947]
可以看出是有些误差的,误差来自dobot机械误差,aruco误差,标签贴的误差吧
放代码:
import threading
import time
import pyrealsense2 as rs
import numpy as np
import cv2
# 提示没有aruco的看问题汇总
import cv2.aruco as aruco
import rsAruco as ra
import DobotDllType as dType
# 配置摄像头与开启pipeline
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
profile = pipeline.start(config)
align_to = rs.stream.color
align = rs.align(align_to)
# 获取对齐的rgb和深度图
def get_aligned_images( ):
frames = pipeline.wait_for_frames()
aligned_frames = align.process(frames)
aligned_depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
# 获取intelrealsense参数
intr = color_frame.profile.as_video_stream_profile().intrinsics
# 内参矩阵,转ndarray方便后续opencv直接使用
intr_matrix = np.array([
[intr.fx, 0, intr.ppx], [0, intr.fy, intr.ppy], [0, 0, 1]
])
# 深度图-16位
depth_image = np.asanyarray(aligned_depth_frame.get_data())
# 深度图-8位
depth_image_8bit = cv2.convertScaleAbs(depth_image, alpha=0.03)
pos = np.where(depth_image_8bit == 0)
depth_image_8bit[pos] = 255
# rgb图
color_image = np.asanyarray(color_frame.get_data())
# return: rgb图,深度图,相机内参,相机畸变系数(intr.coeffs)
return color_image, depth_image,intr, intr_matrix, np.array(intr.coeffs),aligned_depth_frame
def center_aruco():
rgb, depth, intr,intr_matrix, intr_coeffs,aligned_depth_frame = get_aligned_images()
# 获取dictionary, 5x5的码,指示位50个,这个看你打出来的二维码是选哪些参数打的来设置
aruco_dict = aruco.Dictionary_get(aruco.DICT_5X5_50)
# 创建detector parameters
parameters = aruco.DetectorParameters_create()
# 输入rgb图, aruco的dictionary, 相机内参, 相机的畸变参数
corners, ids, rejected_img_points = aruco.detectMarkers(rgb, aruco_dict, parameters=parameters,
cameraMatrix=intr_matrix, distCoeff=intr_coeffs)
if len(corners) != 0:
point = np.average(corners[0][0], axis=0)
depth = aligned_depth_frame.get_distance(point[0], point[1])
point = np.append(point, depth)
if depth != 0:
global center
global color_image
# print("center:%f %f, depth:%f m" %(point[0], point[1], point[2]))
x = point[0]
y = point[1]
z = point[2]
## see rs2 document:
## https://github.com/IntelRealSense/librealsense/wiki/Projection-in-RealSense-SDK-2.0#point-coordinates
## and example: https://github.com/IntelRealSense/librealsense/wiki/Projection-in-RealSense-SDK-2.0#point-coordinates
x, y, z = rs.rs2_deproject_pixel_to_point(intr, [x, y], z)
center = [x, y, z]
# print("center is ", center)
# print(center)
color_image = aruco.drawDetectedMarkers(rgb, corners)
else:
center, color_image = None, None
print("not found aruco!")
return center, color_image
def dobot_connect( ):
# dobot init
CON_STR = {
dType.DobotConnect.DobotConnect_NoError: "DobotConnect_NoError",
dType.DobotConnect.DobotConnect_NotFound: "DobotConnect_NotFound",
dType.DobotConnect.DobotConnect_Occupied: "DobotConnect_Occupied"}
# Load Dll
api = dType.load()
# Search
# print(dType.SearchDobot(api))
# Connect Dobot
state = dType.ConnectDobot(api, "COM3", 115200)[0]
print("Connect status:", CON_STR[state])
return api, state
def dobot_init(api,state):
if (state == dType.DobotConnect.DobotConnect_NoError):
#Clean Command Queued
dType.SetQueuedCmdClear(api)
dType.SetQueuedCmdStartExec(api)
#Async Motion Params Setting
# dType.SetHOMEParams(api, 145, -20, 118, 0, isQueued = 1)
# dType.SetPTPJointParams(api, 200, 200, 200, 200, 200, 200, 200, 200, isQueued = 1)
# dType.SetPTPCommonParams(api, 100, 100, isQueued = 1)
#Async Home
# dType.SetHOMECmd(api, temp = 0, isQueued = 1)
dType.SetPTPCmd(api,1, 145, -20, 118, 0, isQueued = 1)
if __name__ == "__main__":
n = 0
i = 0
default_cali_points = [[209, -140, 75, 0], [205, -92, 64, 0],
[236, 24, 29, 0], [169, 30, 53, 0],
[262, 41, 7, 0], [221, 4, 67, 0],
[214, -29, 125, 0], [237, -38, -12, 0]]
np_cali_points = np.array(default_cali_points)
arm_cord = np.column_stack(
(np_cali_points[:, 0:3], np.ones(np_cali_points.shape[0]).T)).T
centers = np.ones(arm_cord.shape)
api, state = dobot_connect()
dobot_init(api, state)
if (state == dType.DobotConnect.DobotConnect_NoError):
for ind, pt in enumerate(default_cali_points):
print("Current points:", pt)
queuedCmdIndex = dType.SetPTPCmd(
api, 1, pt[0], pt[1], pt[2], pt[3], isQueued=1)
while dType.GetQueuedCmdCurrentIndex(api) != queuedCmdIndex:
time.sleep(2)
time.sleep(3)
center, color_image = center_aruco()
if center is not None:
centers[0:3, ind] = center
print("centers is ", center)
else:
print("no aruco!")
image_to_arm = np.dot(arm_cord, np.linalg.pinv(centers))
arm_to_image = np.linalg.pinv(image_to_arm)
# dType.SetPTPCmd(api, 1, 217, 0, 154, 0, isQueued=0)
dType.SetQueuedCmdStopExec(api)
print("Finished")
print("Image to arm transform:\n", image_to_arm)
print("Arm to Image transform:\n", arm_to_image)
print("Sanity Test:")
print("-------------------")
print("Image_to_Arm")
print("-------------------")
for ind, pt in enumerate(centers.T):
print("Expected:", default_cali_points[ind][0:3])
print("Result:", np.dot(image_to_arm, np.array(pt))[0:3])
print("-------------------")
print("Arm_to_Image")
print("-------------------")
for ind, pt in enumerate(default_cali_points):
print("Expected:", centers.T[ind][0:3])
pt[3] = 1
print("Result:", np.dot(arm_to_image, np.array(pt))[0:3])
cv2.destroyAllWindows()
pipeline.stop()
time.sleep(1)
dType.DisconnectDobot(api)
DobotDllType.py自己去dobot官网下python的demo里面找吧,要对版本!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









