




 本文详述了BHuman机器人足球竞赛软件的配置流程,包括Ubuntu环境搭建、BHuman与Naoqi SDK安装、机器人系统镜像更新、角色创建与程序烧录,以及网络配置与调试技巧。
本文详述了BHuman机器人足球竞赛软件的配置流程,包括Ubuntu环境搭建、BHuman与Naoqi SDK安装、机器人系统镜像更新、角色创建与程序烧录,以及网络配置与调试技巧。
分享个人比赛过程中使用BHuman的心得。欢迎批评指正。
一.软件准备
1.安装VMwareWorkStation并安装Ubuntu16.04 64位
参考链接:https://blog.youkuaiyun.com/qq_41179817/article/details/79341951
这里需要注意的是bhuman程序是32位的,但是需要64位的ubuntu环境运行,如果使用32位的ubuntu make 时会出错。
同样如果用64位的sdk包解压installbhuman也会出错。
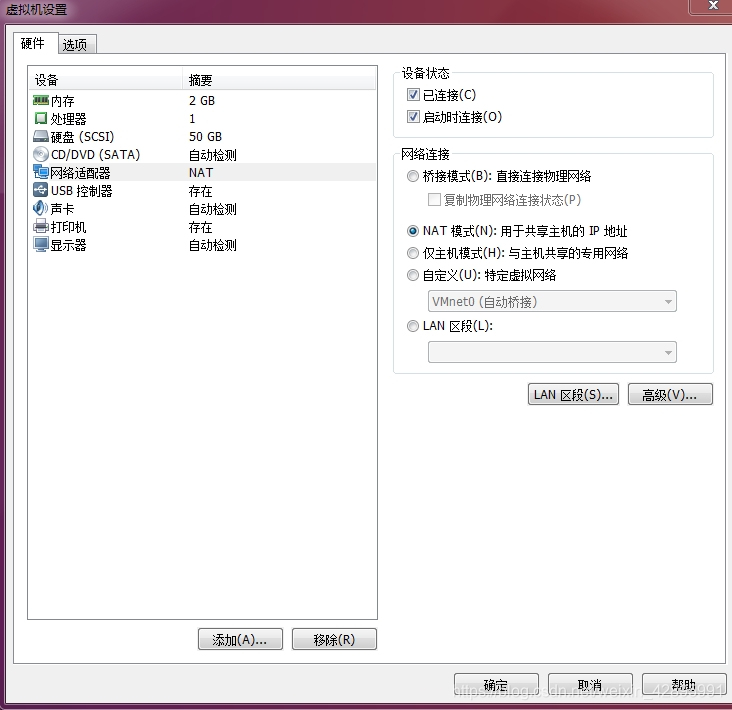
此外,虚拟机网络连接需要选择NAT模式,让虚拟机共享主机IP,否则在使用ssh或者bush连接Nao时容易出现连不上的情况。
2.下载Bhuman2017以及naoqi-sdk包
在github上下载Bhuman2017(2018同理配置)
参考链接:https://github.com/bhuman/BHumanCodeRelease
在软银官网上下载naoqi-sdk-2.1.4.13-linux32.tar.gz,nao的32位C++SDK
参考链接:https://community.ald.softbankrobotics.com/en/resources/software/language/en-gb
注册账号下载,注意版本号和32位,sdk下载完后不用解压。
3.安装bhuman
安装bhuman必须的库:
sudo apt-get install clang qtbase5-dev libqt5svg5-dev libglew-dev libxml2-dev graphviz xterm
解压BHumanCodeRelease-master.zip
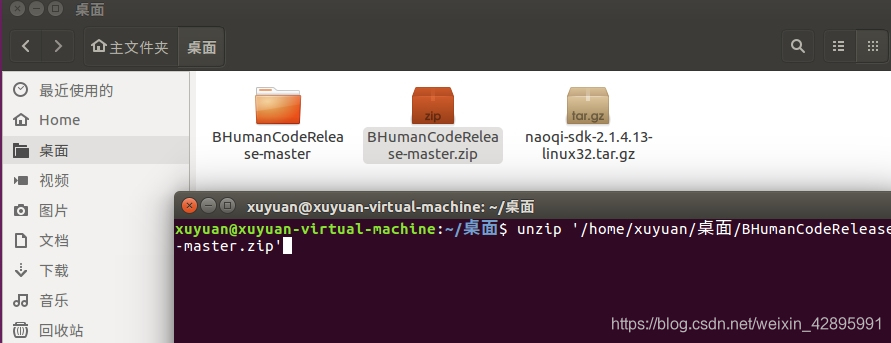
解压后如图
在解压后的文件夹中打开install目录,右键打开终端输入
./installAlcommon '/home/xuyuan/桌面/naoqi-sdk-2.1.4.13-linux32.tar.gz'
安装nao的c++sdk

在/Make/Linux文件夹下右键打开终端使用make编译bhuman,第一次编译时间比较长,等待make完后bhuman文件夹下会多出一个build文件夹,这个文件夹中包含bush,simrobot等工具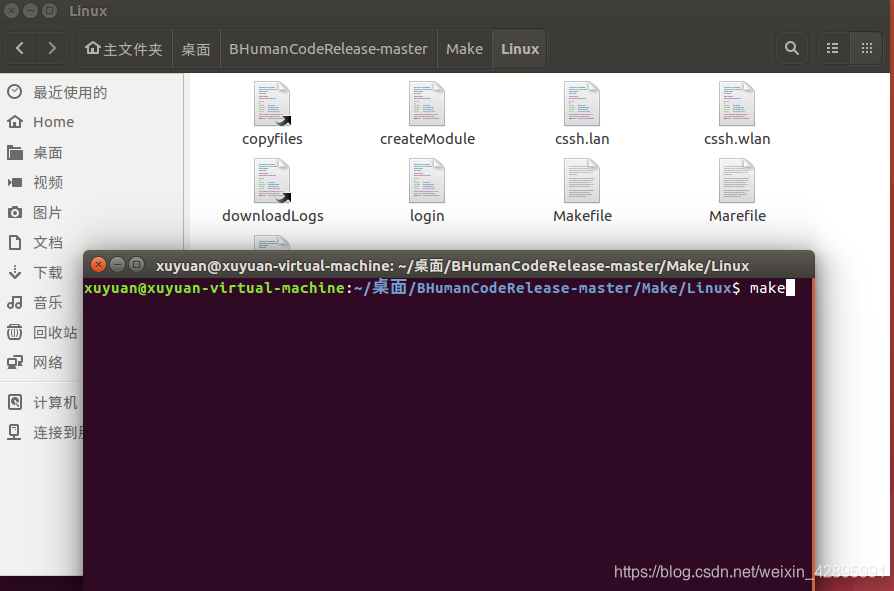
make完以后再在终端下输入make CONFIG=Develop
此后改动代码都需要在Make/Linux文件下重新make,使用make命令会同时编译烧入机器人的程序和simRobot,使用make Nao只编译烧入机器人中的程序,生成的烧录程序在…/BHumanCodeRelease-master/Build/Linux/Nao/Develop下。至此电脑上bhuman安装完毕。
4.对Nao刷入bhuman
刷入bhuman之前需要将nao的系统镜像版本刷到2.1.4.13,U盘刷机教程官网上有,记得点选factory reset,nao用V5代,用V6的系统镜像是2.8并且有保护,用2.1.4的镜像刷进去是没反应的,还是2.8的系统。
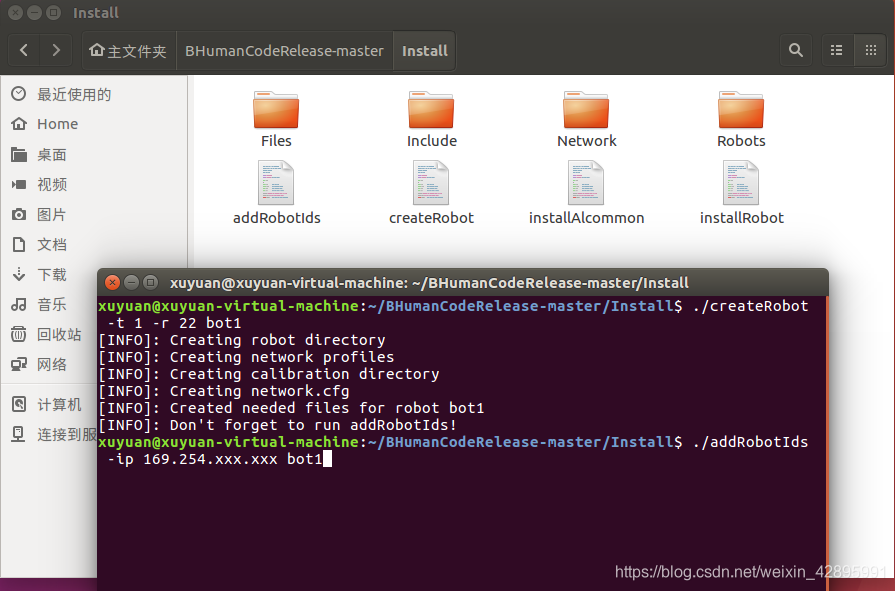
打开install文件夹右键打开终端输入以下指令,创建一个机器人角色
./createRobot -t 1 -r 22 bot1
-t代表队伍号码,-r代表角色号码,可选1-99的数字,这里1与22是随便选的,与刷入bhuman之后Nao的IP以及同队Nao之间的相互通信有关,bot1是给创建角色取得名字。
./addRobotIds -ip 169.254.xxx.xxx bot1
这里的ip是刷机后按Nao胸口自己报的ip,有线连接一般是169.254开头,addRobotids会向config文件中添加当前机器人的身体及头部序列号,ADLXX…XXX ,ADLXX…XXX,每台Nao序列号独立,不能将一台Nao绑定至多个角色。
添加的序列号在robots.cfg中可以看到,有时候addRobot会失败,这个时候自己打开这个文件,照着格式自己手动添加一下就行。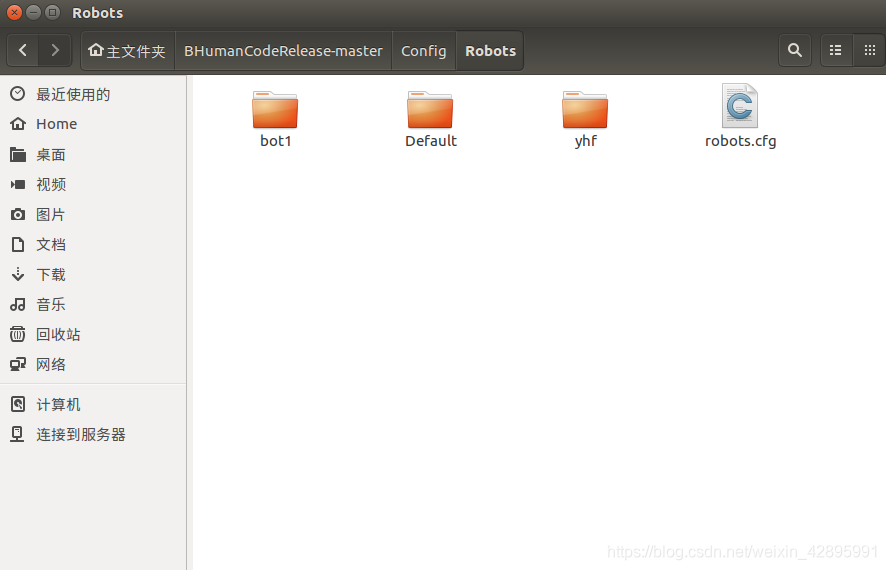
接着继续输入
./installRobot 169.254.xxx.xxx
向Nao中安装bhuman,安装过程中会询问Nao的root密码和用户密码,默认是root和nao,安装之后终端会显示Nao正在重启,重启过程大概3-5分钟,重启过后Nao不会有任何反应,按胸口也不再报ip,只有头顶灯等在亮,此时Nao已经是bhuman系统了。
Nao的IP已经变成了169.254.1.22,这里第三,第四个字段是create时设置的队伍号和角色号。
使用ssh nao@169.254.1.22 可以连接则说明安装成功。接下来可以使用bush或者copyfiles给Nao烧录程序,推荐使用bush烧录,比较方便,还能看到电量,连接simRobot等,但在使用bush前还有几个地方的网络配置需要修改。

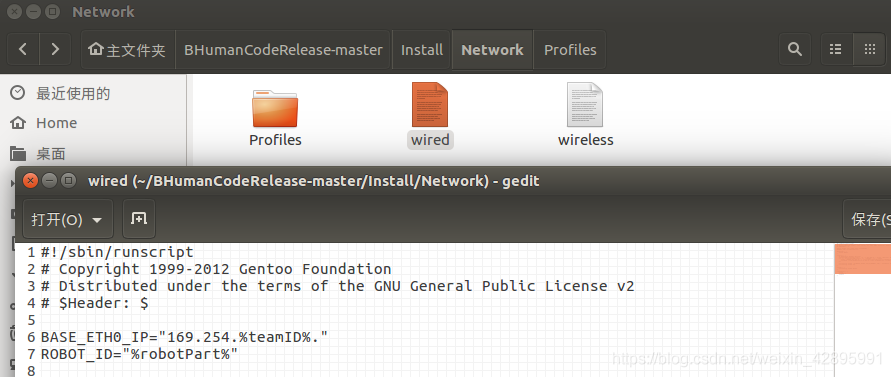

根据自己机器人的IP以及有线无线的情况修改上面三幅图中的网络配置。其中profiles文件夹中的default文件是烧录后机器人就会自动加载的无线网配置,需要根据自己的路由器修改文件中的名字,安全协议,密码等才能使用无线连接。
设置完成后就可以是用bush烧录程序,在这个图中路径文件夹下打开bush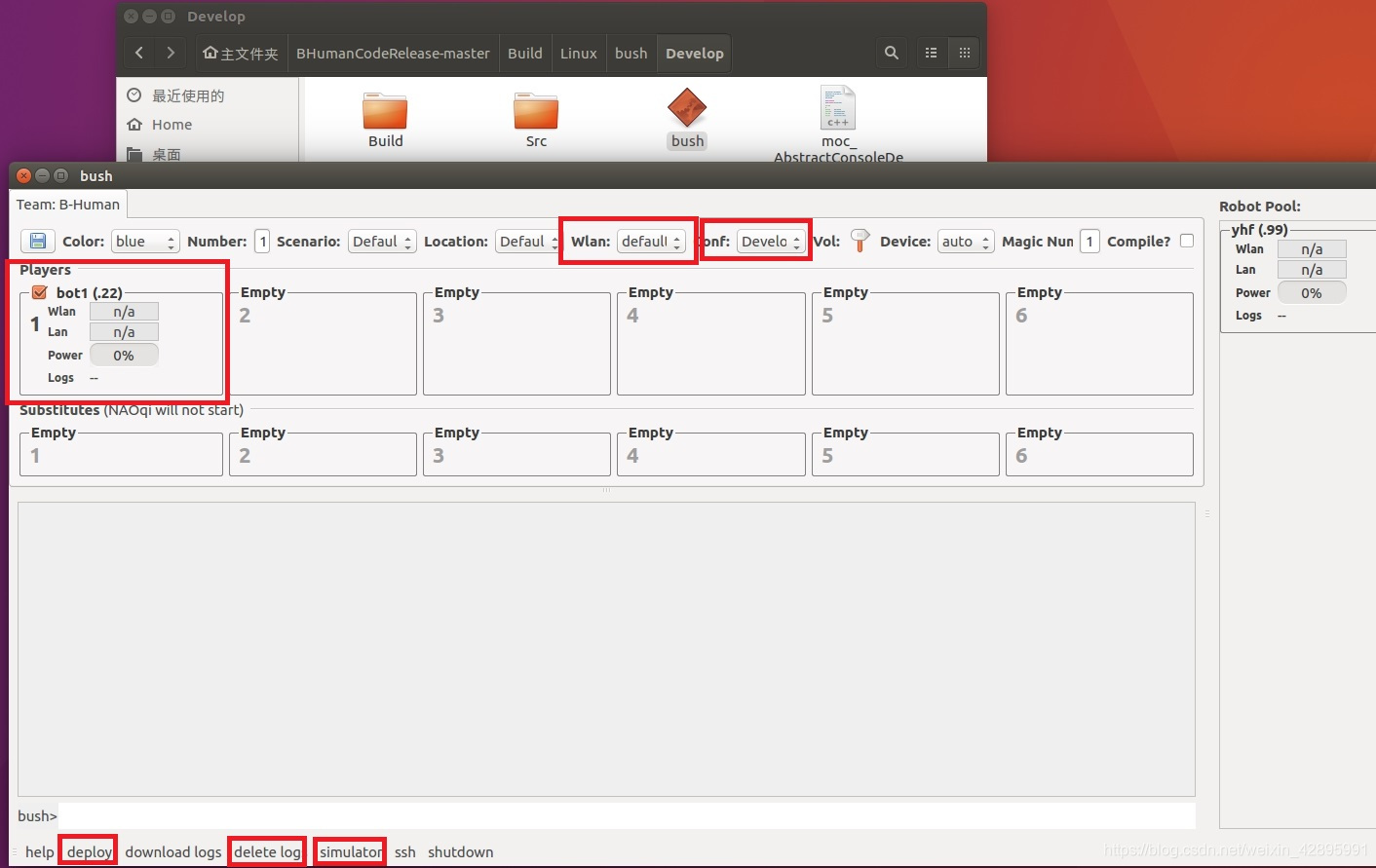
wlan选default,conf选Develop,如果选release的话会在bush里编译,要点选compile,创建成功的角色会显示在右侧,拉过来打上勾,如果成功连接会显示电量和网络情况,点depoly可以往Nao里面烧程序,点simulator输入ip可以使用simRobot调试机器人,会在后续中介绍,烧录程序次数过多的话log会比较多,log过多有时候会影响程序正常运行,delete一下就行。烧录成功后bush界面会显示success,过一会机器人会说run striker ,此时机器人已经运行bhuman自带的前锋的例子,程序结构及使用将在后续中介绍。
第一次写博客分享经验,如有不周还请谅解,欢迎讨论。

















 4068
4068

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









