




 文章介绍了GCAN在故障诊断领域的实际应用,通过DAGCN(带有多接收域GCN的域对抗网络)学习无标签目标域的特征,强调了图生成、对抗训练和MMD对准在解决无监督域适应问题中的作用。实验结果显示,DAGCN在跨域故障诊断中表现出色,优于其他比较方法。
文章介绍了GCAN在故障诊断领域的实际应用,通过DAGCN(带有多接收域GCN的域对抗网络)学习无标签目标域的特征,强调了图生成、对抗训练和MMD对准在解决无监督域适应问题中的作用。实验结果显示,DAGCN在跨域故障诊断中表现出色,优于其他比较方法。
恕我直言:这篇文章与“GCAN: Graph Convolutional Adversarial Network for Unsupervised Domain Adaptation CVPR 2019”的思想基本一致,只是做了一个应用,但是也能发一篇高水平刊物,就很说明问题,不过文章很多在故障诊断的应用手法还是值得借鉴
一、预备知识:
无监督域自适应方法(Unsupervised Domain Adaptation):用于学习域不变和区分性特征。代表方法包括域对抗网络DANN和MMD(最大平均差异度量)方法。
MMD是重构希尔伯特空间的非参数度量函数,它经常用于评估两个分布期望的相似性。MMD方法作为深度网络的一部分用于学习可迁移特征。
DANN来自于生成对抗网络,其利用域判别器和特征提取器之间的两层minmax博弈层可以提取迁移特征。特征提取器旨在提取域不变特征去“欺骗”域判别器,而域判别器又被训练用于区分特征提取器提取的特征是来自于源域还是目标域。通过这样的对抗训练,特征提取器可以学习到两个域的全局分布。
GCN可以聚合k范围内的邻点信息以此取得图平滑,但是传统GCN只能在一个固定接收域内聚集信息;而多接收域GCN(MRF-GCN)可以获得丰富的特征表示并将数据结构信息嵌入至特征表示中。
二、所提方法:
A.域对抗网络:
在本工作中,主要讨论新工作环境下无标签样本的故障诊断。传感器数据分为源域(有标签)和目标域(无标签)。在UDA中,假定源域和目标域的标签空间是相同的,而特征空间是不同但有关联的。本文的目标是建立一个深度网络,能够预测目标域的样本标签。
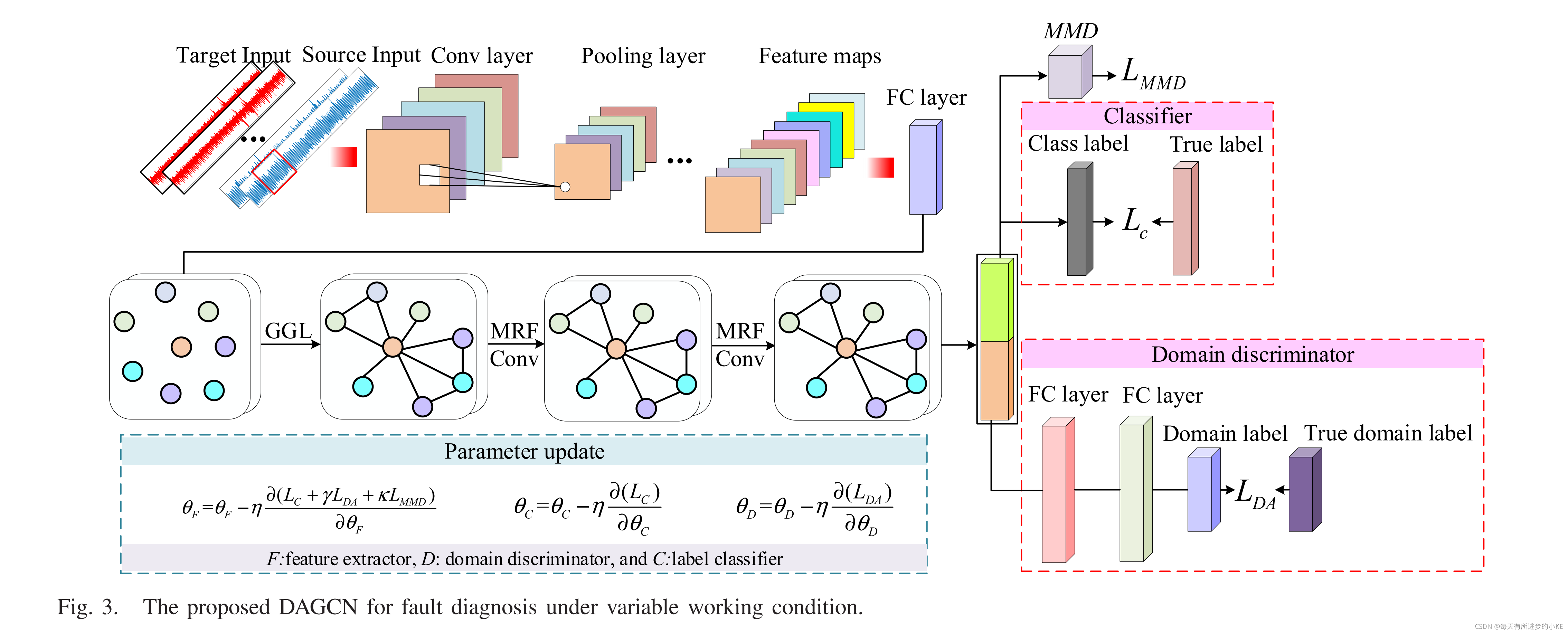
提出的基于变工况故障诊断的DAGCN流程如下图:首先原始数据输入至CNN以获取特征映射,然后每个特征向量被视作是节点。通过提出的GGL方法,特征向量值被视作自动生成图的节点特征。之后,获取的图被导入至GCN以此将数据结构信息嵌入至节点特征。最后,获得的节点特征被用于故障分类以及域对抗训练。因此,可以将步骤总结为:图生成,目标函数以及模型参数更新。
B. 图生成
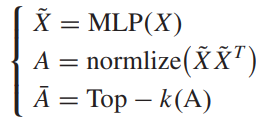
图有两个比较重要的组成部分,即邻接矩阵A和节点特征矩阵X。为了获取X,一个CNN被用于从输入数据中获取特征,获取的节点特征映射可以表示为:
![]()
![]() 是一个小批次输入矩阵。
是一个小批次输入矩阵。
提出了一种GGL,获取邻接矩阵A,并从小批量输入矩阵构造实例图,其过程如图4所示。首先,将提取的特征矩阵输入多层感知器(MLP)。然后,通过MLP特征及其转置矩阵之间的矩阵乘法得到邻接矩阵。最后,根据top-k排序机制选择每个节点的前k个最近邻。因此,邻接矩阵可由下式得到:
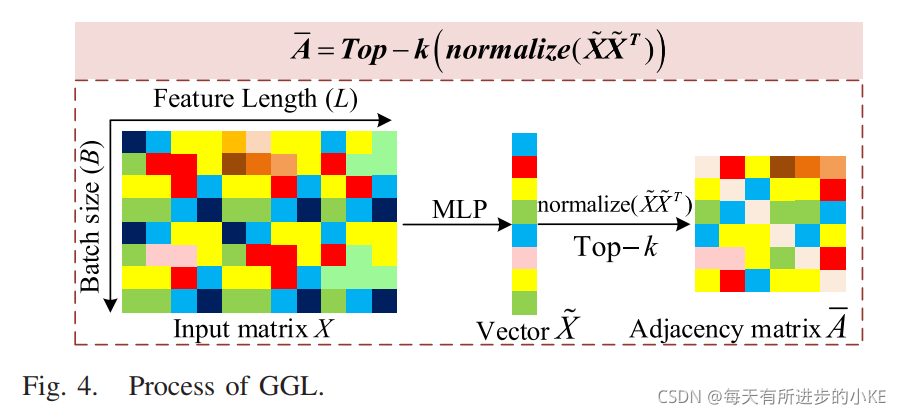
Top−k(·)返回A在每列前k个最大值的索引,使邻接矩阵稀疏,减少了计算负担。
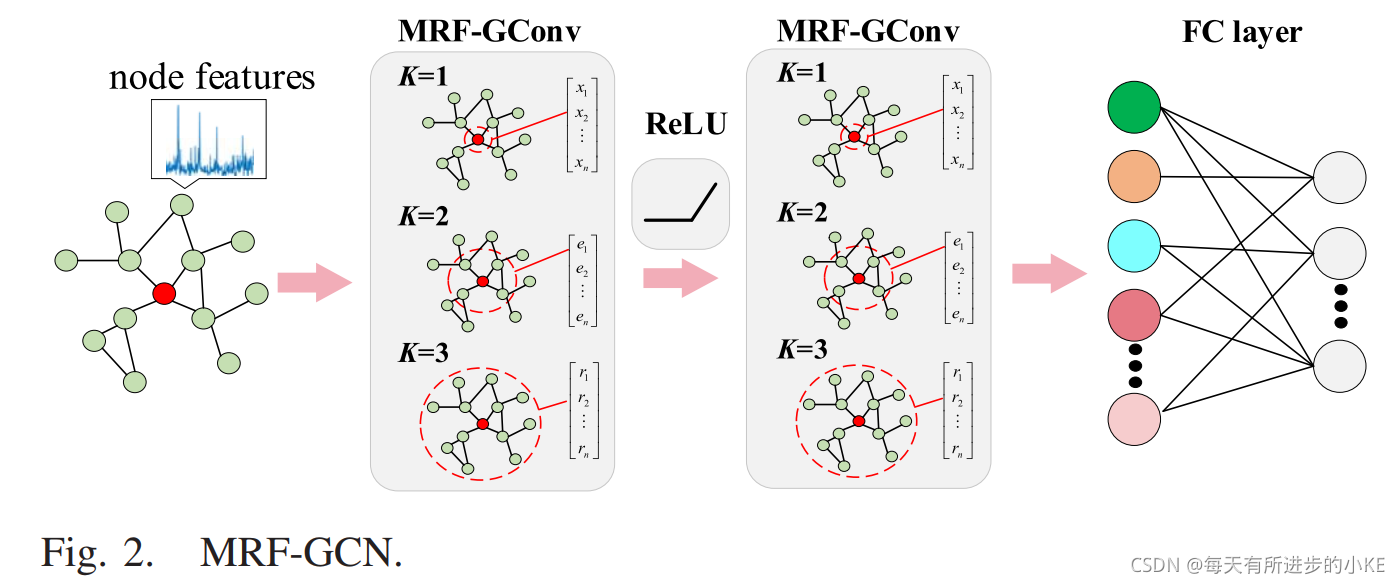
如图2所示,三层接收域(K1,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8157
8157

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









