






 本文介绍了如何在Ubuntu18.04上使用Python扩展包Pybullet搭建机器人仿真环境,包括安装步骤、Python库numpy的安装以及简单的测试代码示例。相比之下,相比于Gazebo,Pybullet的安装更为便捷。
本文介绍了如何在Ubuntu18.04上使用Python扩展包Pybullet搭建机器人仿真环境,包括安装步骤、Python库numpy的安装以及简单的测试代码示例。相比之下,相比于Gazebo,Pybullet的安装更为便捷。
机器人仿真领域最有名的是gazebo。但其安装很麻烦。
本文介绍的是采用pybullet搭建的机器人仿真环境。它是python的扩展包,安装简单。
首先安装pybullet。在windows中安装pybullet需要先进行编译,也比较麻烦。所以,这里采用在ubuntu18.04中安装。
ubuntu18.04镜像中一般会自带python。比如Python 3.6.9。不需要重复安装。但是可能需要我们安装一个pip,命令如下。
sudo apt-get install python3-pip接下来就可以安装pybullet,命令如下。
pip3 install pybullet-3.2.5-cp36-cp36m-manylinux_2_5_x86_64.manylinux1_x86_64.whl -i https://pypi.tuna.tsinghua.edu.cn/simplepybullet的安装包可以在如下百度网盘中获取。
链接:https://pan.baidu.com/s/1_TyZrQPyu8vxij5u_cH_jA
提取码:o9jy 接下来记得装numpy,命令如下。
sudo pip3 install numpy==1.18.5 -i https://pypi.tuna.tsinghua.edu.cn/simple现在环境已经搭建完毕了。接下来,写一段代码进行测试,如下。
import pybullet as p
import pybullet_data
p.connect(p.GUI)
p.setGravity(0,0,-10)
p.resetSimulation()
p.setAdditionalSearchPath(pybullet_data.getDataPath())
planeId = p.loadURDF("/home/zhyc/work/myfirst.urdf")
while 1:
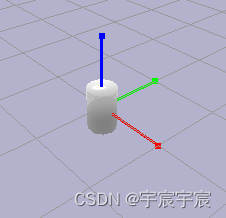
p.stepSimulation()其中myfirst.urdf文件如下。
<?xml version="1.0"?>
<robot name="myfirst">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</visual>
</link>
</robot>运行后可看到如下图像。

















 2137
2137

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









