







P:比列
I:积分
D:微分
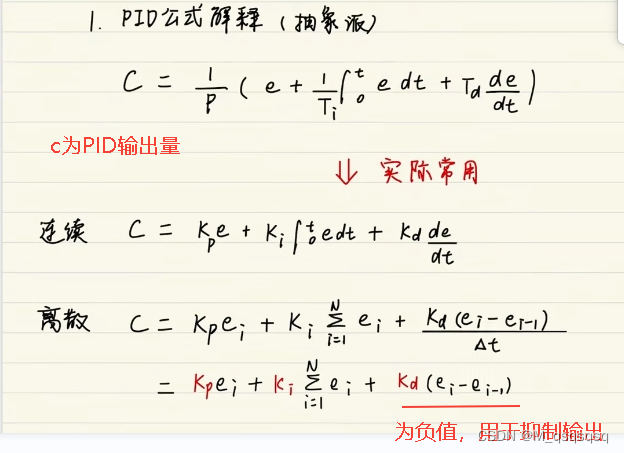
以下调节的是Kp、Ki、Kd
1. 先将Ki和Kd设置为0,Kp值慢慢调大,Kp设置的越大输出量就越大,当输出接近目标值即可;纯P控制一定存在稳态误差。
2. 再将Ki慢慢调大,该值作用是减少稳态误差;
3. 最后调节Kd,该值调大后会减少超调,但是也不能调的太大,如果调的太大会大大延长系统到达稳定的时间。通常情况只有在系统出现超超调是才调Kd。Kd适用于抑制输出的。
注意:
① Kp越大,P值越小;
Ki越大,I值越小;
Kd越大,D值越大;
P:比列
I:积分
D:微分
以下调节的是Kp、Ki、Kd
1. 先将Ki和Kd设置为0,Kp值慢慢调大,Kp设置的越大输出量就越大,当输出接近目标值即可;纯P控制一定存在稳态误差。
2. 再将Ki慢慢调大,该值作用是减少稳态误差;
3. 最后调节Kd,该值调大后会减少超调,但是也不能调的太大,如果调的太大会大大延长系统到达稳定的时间。通常情况只有在系统出现超超调是才调Kd。Kd适用于抑制输出的。
注意:
① Kp越大,P值越小;
Ki越大,I值越小;
Kd越大,D值越大;
 1008
1008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























